

|
Херсонський національний технічний університет Кафедра загальної та прикладної фізики |
КІНЕМАТИКА ОБЕРТАЛЬНОГО РУХУ Лекція 1.2. |
|
|
|
|---|---|
|
|
|
|
|
|
|
|
 1.2.
КІНЕМАТИКА ОБЕРТАЛЬНОГО РУХУ
1.2.
КІНЕМАТИКА ОБЕРТАЛЬНОГО РУХУ-
РУХ ПО КОЛУ
Розглянемо,
як окремий
випадок
криволінійного руху 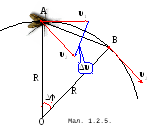 рівномірний
рух матеріальної точки по колу радіуса
рівномірний
рух матеріальної точки по колу радіуса
![]() з центром
з центром
![]() (Мал.1.2.1). При цьому швидкість руху точки
залишається сталою за величиною, а
змінюється за напрямом. Нехай за малий
проміжок часу матеріальна точка
перемістилась з точки
(Мал.1.2.1). При цьому швидкість руху точки
залишається сталою за величиною, а
змінюється за напрямом. Нехай за малий
проміжок часу матеріальна точка
перемістилась з точки
![]() траєкторії в точку
траєкторії в точку
![]() .
Зміна швидкості за напрямом при цьому
характеризуватиметься вектором
.
Зміна швидкості за напрямом при цьому
характеризуватиметься вектором
![]() ,
який визначаємо паралельним перенесенням
і відкладенням з точки
,
який визначаємо паралельним перенесенням
і відкладенням з точки
![]() вектора
вектора
![]() (Мал.1.2.1). Трикутник
(Мал.1.2.1). Трикутник
![]() і трикутник зі сторонами
і трикутник зі сторонами
![]() ,
,
![]() ,
,
![]() - подібні. З їхньої подібності маємо:
- подібні. З їхньої подібності маємо:
|
|
(1.2.1) |
Поділивши
обидві частини на
![]() і перейшовши до границі, маємо:
і перейшовши до границі, маємо:
|
|
(1.2.2) |
Звідси маємо:
|
|
(1.2.3) |
Оскільки
при
![]() кут
кут
![]() ,
то
,
то
![]() і вектор
і вектор
![]() буде перпендикулярним до вектора
швидкості
буде перпендикулярним до вектора
швидкості
![]() в точці
в точці
![]() траєкторії (
траєкторії (![]()
![]()
![]() ),
тобто напрямленим по радіусу до центра.
Таке прискорення називатимемо доцентровим.
Отже, при рівномірному русі матеріальної
точки по колу тангенціального прискорення
немає, а повне прискорення дорівнює
доцентровому.
),
тобто напрямленим по радіусу до центра.
Таке прискорення називатимемо доцентровим.
Отже, при рівномірному русі матеріальної
точки по колу тангенціального прискорення
немає, а повне прискорення дорівнює
доцентровому.
-
КІНЕМАТИКА ОБЕРТАЛЬНОГО РУХУ
П ри
обертальному русі твердого тіла навколо
нерухомої осі всі його точки описують
кола, центри яких лежать на осі обертання
(Мал.1.2.2). Проведемо через вісь обертання
дві площини 1
і 2.
Одну з них (2)
жорстко зв’яжемо з тілом, а другу (1)
вважатимемо нерухомою.
Обертання тіла навколо осі можна задати
за допомогою кута
ри
обертальному русі твердого тіла навколо
нерухомої осі всі його точки описують
кола, центри яких лежать на осі обертання
(Мал.1.2.2). Проведемо через вісь обертання
дві площини 1
і 2.
Одну з них (2)
жорстко зв’яжемо з тілом, а другу (1)
вважатимемо нерухомою.
Обертання тіла навколо осі можна задати
за допомогою кута
![]() між цими площинами. Якщо за проміжки
часу
між цими площинами. Якщо за проміжки
часу
![]() тіло здійснило обертання на кут
тіло здійснило обертання на кут
![]() ,
то границю, до якої прямує відношення
,
то границю, до якої прямує відношення
![]() при
при
![]() ,
називають миттєвою
кутовою швидкістю,
або просто кутовою
швидкістю.
,
називають миттєвою
кутовою швидкістю,
або просто кутовою
швидкістю.
|
|
(1.2.4) |
Обертання
тіла із сталою кутовою швидкістю
називатимемо рівномірним. Нерівномірне
обертання тіла характеризуватиме за
допомогою кутового
прискорення.
Якщо за малий проміжок часу
![]() кутова швидкість змінилася на величину
кутова швидкість змінилася на величину
![]() ,
то границя, до якої прямує відношення
,
то границя, до якої прямує відношення
![]() при
при
![]() ,
називатимемо миттєвим кутовим
прискоренням, або просто прискоренням:
,
називатимемо миттєвим кутовим
прискоренням, або просто прискоренням:
|
|
(1.2.5) |
З урахуванням (1.2.4):
|
|
(1.2.6) |
При обертальному русі всі точки твердого тіла мають однакові кутові швидкості і кутове прискорення. Кутову швидкість і кутове прискорення вимірюють:
|
|
(1.2.7) |
-
СПІВВІДНОШЕННЯ МІЖ ЛІНІЙНИМИ ТА КУТОВИМИ ВЕЛИЧИНАМИ
Встановимо
співвідношення між лінійною і кутовою
швидкостями та лінійним і кутовим
прискоренням. Довжина
дуги
![]() ,
яку описує точка, що знаходиться на
відстані
,
яку описує точка, що знаходиться на
відстані
![]() від осі при обертанні на кут
від осі при обертанні на кут
![]() :
:
|
|
(1.2.8) |
Поділимо
на
![]() .
При
.
При
![]() матимемо:
матимемо:
|
|
(1.2.9) |
На основі формул (1.2.3) та (1.2.9) отримаємо, що нормальне прискорення:
|
|
(1.2.10) |
Тангенціальне прискорення:
|
|
(1.2.11) |
З
рівнянь (1.2.10) та (1.2.11) видно, що як нормальне
так і тангенціальне прискорення
пропорційне відстані від осі обертання
![]() .
Модуль
повного прискорення
точки тіла:
.
Модуль
повного прискорення
точки тіла:
|
|
(1.2.11) |
Отже, знаючи кутову швидкість і кутове прискорення тіла, що обертається, а також відстань від осі обертання, можна визначити величину і напрям прискорення будь-якої точки тіла. Оскільки відношення тангенціального прискорення до нормального:
|
|
(1.2.12) |
є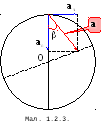 однаковим для всіх точок тіла, то вектор
повного прискорення для всіх точок тіла
утворює з радіусом, проведеним до цієї
точки, один і той самий кут
однаковим для всіх точок тіла, то вектор
повного прискорення для всіх точок тіла
утворює з радіусом, проведеним до цієї
точки, один і той самий кут
![]() (мал.1.2.3).
(мал.1.2.3).
При обертальному русі кутова швидкість і кутове прискорення визначаються однозначно тоді, коли відоме розташування в просторі осі обертанні і вказано напрям обертання навколо неї.
Оскільки
лінійна швидкість і лінійне прискорення
– векторні величини, а крім того між
величинами
![]() ,
,
![]() ,
,
![]() ,
,
![]() і існує взаємозв’язок у вигляді формул
(1.2.9)-(1.2.12), то кутову
швидкість і кутове прискорення доцільно
визначати як вектори.
і існує взаємозв’язок у вигляді формул
(1.2.9)-(1.2.12), то кутову
швидкість і кутове прискорення доцільно
визначати як вектори.
В ектор
кутової швидкості зображують відрізком
прямої, яка збігається з віссю обертання.
Довжина цієї прямої в певному масштабі
виражає величину кутової швидкості.
Цей зв’язок умовились
встановлювати за правилом
правого гвинта:
вектор
кутової швидкості напрямлений вздовж
осі обертання в бік поступального руху
гвинта, коли його обертати за напрямом
обертання
(Мал.1.2.4). Такий вектор називають осьовим
або аксіальним.
Оскільки кутова швидкість
ектор
кутової швидкості зображують відрізком
прямої, яка збігається з віссю обертання.
Довжина цієї прямої в певному масштабі
виражає величину кутової швидкості.
Цей зв’язок умовились
встановлювати за правилом
правого гвинта:
вектор
кутової швидкості напрямлений вздовж
осі обертання в бік поступального руху
гвинта, коли його обертати за напрямом
обертання
(Мал.1.2.4). Такий вектор називають осьовим
або аксіальним.
Оскільки кутова швидкість
![]() – вектор, зміна кутової швидкості
– вектор, зміна кутової швидкості
![]() є також вектором. Отже, кутове прискорення
є також вектором. Отже, кутове прискорення
![]() – також вектор, який збігається за
напрямом з вектором
– також вектор, який збігається за
напрямом з вектором
![]() .
.
В
разі, коли орієнтація осі обертання з
часом не змінюється, вектор кутового
прискорення
![]() при збільшення кутової швидкості
збігається
з вектором кутової швидкості. При
зменшенні кутової швидкості напрями
векторів кутового прискорення і кутової
швидкості протилежні.
Запишемо співвідношення (1.2.9)-(1.2.12) у
векторній формі. Для цього розглянемо
радіус
при збільшення кутової швидкості
збігається
з вектором кутової швидкості. При
зменшенні кутової швидкості напрями
векторів кутового прискорення і кутової
швидкості протилежні.
Запишемо співвідношення (1.2.9)-(1.2.12) у
векторній формі. Для цього розглянемо
радіус
![]() обертання точки як вектор, напрямленій
від осі обертання. На основі означення
векторного добутку (лекція 0.1):
обертання точки як вектор, напрямленій
від осі обертання. На основі означення
векторного добутку (лекція 0.1):
|
|
(1.2.13) |
|
|
(1.2.14) |
|
|
(1.2.15) |
 На
Мал.1.2.5 показано розташування векторів
На
Мал.1.2.5 показано розташування векторів
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
Знак
мінус
у формулі (1.2.15) вказує на те, що нормальне
прискорення напрямлене по радіусу до
центра. Введення векторів кутової
швидкості
.
Знак
мінус
у формулі (1.2.15) вказує на те, що нормальне
прискорення напрямлене по радіусу до
центра. Введення векторів кутової
швидкості
![]() і кутового прискорення
і кутового прискорення
![]() є доцільним також тому, що у разі, коли
тіло одночасно бере участь у двох
обертаннях, його результуюче обертання
характеризується саме цими векторами,
які дістанемо завдяки додаванню
за правилом паралелограма.
Приклад розглянутий у [5] на стор. 16.
є доцільним також тому, що у разі, коли
тіло одночасно бере участь у двох
обертаннях, його результуюче обертання
характеризується саме цими векторами,
які дістанемо завдяки додаванню
за правилом паралелограма.
Приклад розглянутий у [5] на стор. 16.
Обертання
характеризується також періодом
обертання
![]() і частотою обертання
і частотою обертання
![]() .
Період
обертання
.
Період
обертання
![]() – час, протягом якого тіло робіть повний
оберт навколо осі обертання, а частота
(лінійна
частота)
– час, протягом якого тіло робіть повний
оберт навколо осі обертання, а частота
(лінійна
частота)
![]() – кількість обертів, які здійснює тіло
за одиницю часу. Між періодом і частотою
обертання існує простий зв’язок:
– кількість обертів, які здійснює тіло
за одиницю часу. Між періодом і частотою
обертання існує простий зв’язок:
|
|
(1.2.16) |
Оскільки
за період
![]() тіло здійснює повний поворот на кут
тіло здійснює повний поворот на кут
![]() =
=![]() :
:
|
|
(1.2.17) |
-
ЛІТЕРАТУРА
-
Кудрявцев П.С. Курс истории физики. – М.: Просвещение, 1982.–448 С.
-
Храмов Ю.А. Физики: биографический справочник.–К.: Наукова думка, 1977.–511с.
-
Савельев И.В. Курс общей физики. Т.1. Механика. Молекулярная физика. – М.: Наука, 1987. – 432 с.
-
Бушок Г.Ф., Левандовський В.В., Півень Г.Ф. Курс фізики. 1 кн. Фізичні основи механіки. Електрика і магнетизм. – К.: Либідь, 2001. – 448 с.
-
Кучерук І.М., Горбачук І.Т. Загальна фізика. 1 кн. Фізичні основи механіки. Молекулярна фізика і термодинаміка. – К.: Вища шк., 1995. – 431 с.
-
Зисман Г.А., Тодес О.М. Курс общей физики. Т.1. Механика. Молекулярная физика. – М.: Наука, 1974.
-
Гершензон Е.М., Малов Н.Н. Курс общей физики. Механика. - М.: Просвещение, 1987. – 307 С.
-
Фейнман Р., Лейтон Р., Сэндс М. Фейнмановские лекции по физике. Т.1.– М.: Мир.
-
Киттель Ч., Найт У., Рудерман М. БКФ. Механика. - М.: Наука, 1975. – 480 С.
-
Детлаф А.А., Яворский Б.М. Курс физики. – М.: Высш. шк.., 1989. – 608 с.
-
Кузьмичев В.Е. Законы и формулы физики. Справочник. – Киев: Наук. думка, 1989. – 864 с.
-
Иродов И.Е. Основы классической механики. – М.: Высш. шк.
-
Голдстейн Г. Классическая механика.
-
Савельев И.В. Курс физики. В 3-х томах. Т.1. Механика. Молекулярная физика.– М.: Наука, 1989. – 352 с.
|
Факультет машинобудування |
|
|
|
Лектор Дон Н.Л. |
|
стор.
|