

13.3.3 Система г-д с машинами последовательного возбуждения
При малых мощностях электрических машин обычная система Г-Д неэкономична, так как стоимость возбудителей становится соизмеримой со стоимостью основных машин, а удешевление за счет облегчения аппаратуры управления незначительно. В системе Г-Д с машинами последовательного возбуждения (см. рис. 13.6) нет возбудителей, что повышает ее экономичность. Возбуждение генератора и двигателя в этой системе регулируется изменением сопротивлений, шунтирующих обмотки возбуждения. С ростом нагрузки, (тока якоря I) увеличивается Э.Д.С. генератора ЕГи уменьшается скорость двигателя в соответствии с его электромеханической характеристикой приUЯ=Const(см. рис. 13.7). Если пренебречь влиянием реакции якоря и считать машины ненасыщенными, то можно представить (теоретически конечно) идеально жесткую электромеханическую характеристику (см. пунктирную линию на рисунке 13.7), если подобрать соответствующим образом параметры машин. Это положение может быть доказано следующим образом:
![]()
![]() ,
(13.7)
,
(13.7)
г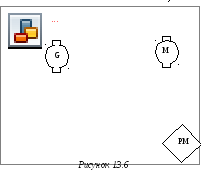 де
де![]() и
и![]() –
коэффициенты пропорциональности между
токомIи поток
–
коэффициенты пропорциональности между
токомIи поток ом
Ф для генератора и двигателя соответственно
с учетом шунтирования их обмоток
возбуждения.
ом
Ф для генератора и двигателя соответственно
с учетом шунтирования их обмоток
возбуждения.
Подставляя значение ЕГи ФДв выражение для электромеханической характеристики двигателя получим:
![]() ,
( 13.8)
,
( 13.8)
где R=RГ +RД– сопротивление якорной цепи системы Г-Д с учетом сопротивлений щеток.
Из (13.8) следует,
что скорость двигателя
![]() не зависит от нагрузки. Скорость
идеального холостого хода
не зависит от нагрузки. Скорость
идеального холостого хода![]() ДОв рассматриваемой системе Г– Д не
“бесконечна“( как и у двигателя с
последовательным возбуждением,питающимся
от сети с постоянным напряжением ), а
имеет конечное значение. Действительно
приI= 0,
ДОв рассматриваемой системе Г– Д не
“бесконечна“( как и у двигателя с
последовательным возбуждением,питающимся
от сети с постоянным напряжением ), а
имеет конечное значение. Действительно
приI= 0,
![]() =
=![]() , ( 13.9)
, ( 13.9)
где ФГ.ОСТ и ФД.ОСТ.– магнитные потоки остаточного намагничивания генератора и двигателя.
Д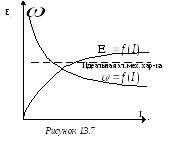 ля
однотипных машин СГ = СД,
ФГ.ОСТ
ля
однотипных машин СГ = СД,
ФГ.ОСТ
![]() и поэтому
и поэтому![]()
Регулирование скорости двигателя осуществляется шунтированием обмоток возбуждения генератора и двигателя. Для реальных машин с насыщенной магнитной системой, а также из-за влияния реакции якоря,
э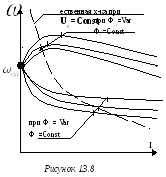 лектромеханические
характеристики не имеют идеальной
жесткости, а выглядят так, как это
показано на рисунке 13.8.
лектромеханические
характеристики не имеют идеальной
жесткости, а выглядят так, как это
показано на рисунке 13.8.
Полный диапазон регулирования скорости в этой системе Г-Д:
![]()
Пуск двигателя производится путем постепенного повышения напряжения генератора (при полном потоке двигателя).
После этого дальнейшее повышение скорости двигателя осуществляется ослаблением его магнитного потока. Останавливается двигатель при отключении от сети асинхронного приводного двигателя генератора.
В системе Г-Д с машинами последовательного возбуждения для точной остановки двигателя может быть использовано динамическое торможение, схема которого показана на рисунке 13.9.
Переход в режим динамического торможения очень важен также при выключении напряжения источника питания приводного асинхронного двигателя.
В режиме динамического торможения по схеме рисунка 13.9 сохраняется направление тока в обмотке возбуждения двигателя и меняется направление тока в обмотке возбуждения двигателя и меняется направление тока в обмотке якоря двигателя (при переключении контактов Л).
С истема
Г-Д с машинами последовательного
возбуждения применяется при относительно
небольшой мощности машин (до 3-5 кВт) в
электроприводах подач металлорежущих
станков.
истема
Г-Д с машинами последовательного
возбуждения применяется при относительно
небольшой мощности машин (до 3-5 кВт) в
электроприводах подач металлорежущих
станков.
При большей мощности машин система теряет экономичность из-за увеличения мощности реостатов, шунтирующих обмотки возбуждения двигателя и генератора.
Механические характеристики двигателя в рассматриваемой системе Г-Д могут быть построены путем применения классических методов – метода переходных характеристик и метода граничных характеристик .
Первый метод в данном случае проще и состоит в следующем (при наличии исходных данных – характеристики холостого хода генератора, естественной характеристике двигателя, сопротивлений обмоток якорей и обмоток возбуждения обеих машин):
– задаются током возбуждения генератора IВГ;
– по характеристике ЕГ=f(IВГ ) определяется значение ЕГдля заданных значенийIВГ;
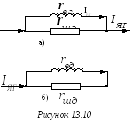
– определяются соответствующие токи якоря генератора (см. рис. 13.10,а):
![]() ;
;
– аналогично подсчитываются токи возбуждения двигателя:
![]()
– определяется Э.Д.С. двигателя при работе его на искусственной характеристике:
![]()
по переходной
характеристике
б)![]()
![]() определяются значения п
определяются значения п
![]() для соответствующих токовIВД(
для соответствующих токовIВД(
– определяется
скорость двигателя при работе на
искусственной характеристике
:
 ;
;
– определяется электромагнитный момент двигателя:
![]()
![]()
![]()
где![]() .
.
13.3.4 Система Г-Д с 3-х обмоточным генератором
Т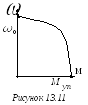 акие
системы электропривода применялись
для механизмов, работающих с большими
перегрузками вплоть до полной остановки
двигателя и стоянки его под током
(экскаваторы, гребные винты ледоколов,
рудные перегружатели, манипуляторы и
нажимные устройства прокатных станов,
ножницы, печные толкатели и т.д. ). В
обычной системе Г-Д остановка двигателя
под нагрузкой вызывает протекание в
якоре чрезмерного тока, опасного для
двигателя. Применение в таких случаях
акие
системы электропривода применялись
для механизмов, работающих с большими
перегрузками вплоть до полной остановки
двигателя и стоянки его под током
(экскаваторы, гребные винты ледоколов,
рудные перегружатели, манипуляторы и
нажимные устройства прокатных станов,
ножницы, печные толкатели и т.д. ). В
обычной системе Г-Д остановка двигателя
под нагрузкой вызывает протекание в
якоре чрезмерного тока, опасного для
двигателя. Применение в таких случаях
максимальной защиты не целесообразно, так как стоянка двигателя под током является для таких механизмов нормальным технологическим режимом, который надо реализовать без отключения двигателя от сети (генератора).
Система Г-Д с 3-х обмоточным генератором обеспечивает получение так называемых “экскаваторных” механических характеристик (рис. 13.11).Схема системы Г-Д с 3-х обмоточным генератором показана на рисунке 13.12. Генератор в этой системе имеет одну (или несколько) обмоток последовательного возбуждения (ОПВ), магнитный поток в которых направлен навстречу основному магнитному потоку, создаваемому в обмотке независимого потоку возбуждения(ОНВ) (рис. 13.12)
К роме
того, генератор имеет обмотку параллельного
независимого ОНВ возбуждения,
(самовозбуждения ОСВ), магнитный поток
в которой направлен согласно с магнитным
потоком обмотки независимого возбуждения.
На рисунке 13.12 направления магнитных
потоков в обмотках генератора показаны
стрелками. Меняя соотношение ампер-витков
отдельных обмоток, можно менять форму
механической характеристики в системе
Г-Д, результирующие ампервитки генератора
в которой определяются по соотношению:
роме
того, генератор имеет обмотку параллельного
независимого ОНВ возбуждения,
(самовозбуждения ОСВ), магнитный поток
в которой направлен согласно с магнитным
потоком обмотки независимого возбуждения.
На рисунке 13.12 направления магнитных
потоков в обмотках генератора показаны
стрелками. Меняя соотношение ампер-витков
отдельных обмоток, можно менять форму
механической характеристики в системе
Г-Д, результирующие ампервитки генератора
в которой определяются по соотношению:
![]()
![]()
![]() .
.
При отсутствии нагрузки на валу (IП = 0) это уравнение принимает вид:
![]() IН
IН![]()
где
 –
отношение ампервитков в обмотке
самовозбуждения при холостом ходе к
ампервиткам обмотки независимого
возбуждения.
–
отношение ампервитков в обмотке
самовозбуждения при холостом ходе к
ампервиткам обмотки независимого
возбуждения.
Очевидно, что форму
механической характеристики двигателя
в этой системе Г-Д можно менять изменением
коэффициента
![]() ,
а также изменение величины АWП
=IПWП
, то есть меняяWП.
,
а также изменение величины АWП
=IПWП
, то есть меняяWП.
При холостом ходе
(или при небольших нагрузках) генератора
величина АW0 лежит
в насыщенной части характеристики
намагничивания. С увеличениемIC
размагничивающее действие АWСрастет и одновременно уменьшается
намагничивающее действие АWСвследствие падения напряжения генератора
при увеличении нагрузки. Таким образом,
уменьшается![]() ,
уменьшается ЭДС генератора и скорость
двигателя.
,
уменьшается ЭДС генератора и скорость
двигателя.
Пока ЭДС генератора
меняется в зоне насыщения падение этой
ЭДС и скорости двигателя с ростом
нагрузки незначительно. При больших
токах нагрузки влияние АWП
значительно, ЭДС генератора
меняется в ненасыщенной зоне, и поэтому
скорость двигателя резко падает (см.рис.
13.13 ). Чем большеWП,
тем больше размагн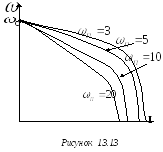 ичивающее
действие последовательной обмотки
возбуждения и тем при меньших значениях
тока нагрузки будет начинаться участок
характеристики с резким снижением
скорости при условии, что
ичивающее
действие последовательной обмотки
возбуждения и тем при меньших значениях
тока нагрузки будет начинаться участок
характеристики с резким снижением
скорости при условии, что![]() .
При одном и том же постоянном значенииWПвеличина
.
При одном и том же постоянном значенииWПвеличина![]() влияет на вид механической характеристики
так, как это показано на рис 13.14.
влияет на вид механической характеристики
так, как это показано на рис 13.14.
Чем больше
![]() тем резче уменьшается
тем резче уменьшается![]() с увеличением нагрузки (так как есть
падение напряжения генератора, уменьшающее
с увеличением нагрузки (так как есть
падение напряжения генератора, уменьшающее![]() ).
Следовательно, чем больше
).
Следовательно, чем больше![]() ,
тем при меньших значениях тока нагрузки
начинается круто падающий участок
механической характеристики двигателя.
Форма падающей кривой механической
характеристики оценивается (сравнительно)
по так называемомукоэффициенту
эффективности,представляющем
отношение площади, ограниченной осями
координат и характеристикой, к площади
прямоугольника со сторонами
,
тем при меньших значениях тока нагрузки
начинается круто падающий участок
механической характеристики двигателя.
Форма падающей кривой механической
характеристики оценивается (сравнительно)
по так называемомукоэффициенту
эффективности,представляющем
отношение площади, ограниченной осями
координат и характеристикой, к площади
прямоугольника со сторонами![]() и
и![]() .
.
Система Г-Д тем лучше, чем ближе к единице коэффициент эффективности. Все рассмотренные в разделе 13.3 разновидности систем Г-Д имеют значительную электромагнитную инерцию в обмотках возбуждения генераторов, что определяет их меньшее быстродействие по сравнению с системами, использующими для питания обмоток якоря и возбуждения различные вентильные преобразователи.
Это обстоятельство, а также увеличение установленной мощности (рост стоимости оборудования и строительно-монтажных работ) явились теми причинами, благодаря которым системы Г-Д не смогли конкурировать с системами вентильного электропривода.
Л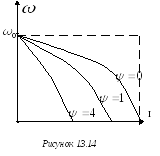 ишь
мощные системы Г-Д (3-5 тыс. кВт) с
вентильным возбуждением электрических
машин и незначительным (по сравнению
с системами ВП-Д) “засорением” сети
высшими гармониками до сих пор
используются в промышленности.
ишь
мощные системы Г-Д (3-5 тыс. кВт) с
вентильным возбуждением электрических
машин и незначительным (по сравнению
с системами ВП-Д) “засорением” сети
высшими гармониками до сих пор
используются в промышленности.