

По принципу работы СЭП классифицируют также на следящие электроприводы с релейным управлением (в курсе ТЭП эти простейшие СЭП не рассматриваются) и на СЭП с плавным управлением, реализующим какой-либо закон управления (П, ПД, ПИ, ПИД-законы). К этой группе СЭП относятся следящие электроприводы со скользящими режимами работы релейных регуляторов, которые эквивалентны линейным регуляторам с бесконечно большим (теоретически) коэффициентом усиления. Эта группа СЭП рассматривается не в обычном курсе ТЭП, а в курсе систем управления электроприводом или же в спецкурсе ТЭП, изучаемом на 5-м курсе, а также аспирантами и магистрами.
С точки зрения конструктивного исполнения СЭП классифицируются по типу применяемого усилителя мощности.
Различают СЭП с транзисторными, магнитными, электромашинными и другими электроусилителями. Применяются в СЭП также и гидро- или пневмоусилители.
СЭП характеризуется рядом показателей качества – как при переходном, так и при установившемся режимах.
При переходном процессе СЭП оценивается по следующим показателям:
Б ы с т р о д е й с т в и е, оцениваемое по быстроте реакции на внешнее возмущение. Это время t, за которое ВЫХ достигает с допустимой погрешностью ДОП значения ВХ при скачкообразном повороте задающей оси на угол ВХ (см. рис. 10.2), или время t2 – время затухания колебаний ВЫХ до допустимой величины.
2. К о л е б а т е л ь н о с т ь оценивается числом колебаний ВЫХ за время tПП. Обычно это 1-2 колебания для хорошего СЭП.
3. П е р е р е г у л и р о в а н и е (), как это показано на рисунке 10.2. Очень большие значения (более 50%) вызывают нежелательные удары в механической части СЭП.
При установившемся режиме работы СЭП оценивается следующими показателями качества:
1. Т о ч н о с т ь С Э П, или угол рассогласования (ошибка)
=ВХ-ВЫХ.
Р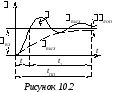 азличают
следующие виды ошибок СЭП:
азличают
следующие виды ошибок СЭП:
– статическая ошибка С при трогании или при неподвижной исполнительной оси после отработки ею заданного угла ВХ.З, то есть при ВЫХ=const.
Причины появления статической ошибки – сухое трение, люфты, остаточное напряжение в источниках питания двигателя, дрейф нуля в электронных усилителях. Максимальная статическая ошибка (С.МАКС) имеет место при трогании и при реверсе.
– динамическая
ошибка Д
при непрерывном движении задающей оси
с постоянной заданной скоростью
![]() .
.
– динамическая ошибка Д при непрерывном движении задающей оси по синусоидальному закону.
Динамические ошибки возрастают при увеличении скорости и уменьшаются при увеличении коэффициента усиления.
2. Д о б р о т н о с т ь С Э П. Этот показатель качества оценивается по коэффициенту добротности
![]() ,
(10.1)
,
(10.1)
учитывающему как
заданную скорость входной оси, так и
динамическую ошибку при данном значении
![]() .
.
3. Д и а п а з о н р е г у л и р о в а н и я с к о – р о с т и
![]() .
(10.2)
.
(10.2)
Современные СЭП обеспечивают работу при DР=1000-2000, а в специальных схемах до DР=30000.
![]()
При изучении динамики СЭП надо найти закон движения выходного вала (исполнительной оси) ВЫХ=f(t), а также закон изменения рассогласования =f(t) при известном законе движения входной (задающей) оси – ВХ=f(t).
Использование различных законов управления, упомянутых ранее (П, ПД, ПИ, ПИД-законы) меняет статические и динамические свойства СЭП, влияет на его устойчивость.
В данном разделе курса ТЭП изучается только влияние различных законов управления на характер движения СЭП и величину рассогласования (). Для этого необходимо с помощью уравнения движения рассмотреть работу простейшего (идеализированного) СЭП, в котором действует лишь одна механическая инерция, а действием других инерционных цепей пренебречь. Для общей приближенной оценки работы СЭП такое допущение можно сделать, так как механическая инерция электропривода значительно больше других инерций. Учет только лишь механической инерции в СЭП понижает порядок общего дифференциального уравнения и делает решение задачи более простым и наглядным.
10.2 Уравнение движения и структурная схема механической части следящего электропривода
Уравнение движения любого электропривода, в том числе и СЭП, записывается как
![]() .
(10.3)
.
(10.3)
Если для СЭП используется двигатель постоянного тока с независимым возбуждением, то значение момента его лучше всего представить из уравнения механической характеристики:
![]() ,
откуда
,
откуда
![]() ,
или, учтя, что
,
или, учтя, что
![]() :
:
![]() ,
(10.4)
,
(10.4)
где МП – пусковой момент двигателя;
![]() –постоянный
коэффициент, характеризующий так
называемое «вязкое» трение в электроприводе,
создаваемое действием противоЭДС.
–постоянный
коэффициент, характеризующий так
называемое «вязкое» трение в электроприводе,
создаваемое действием противоЭДС.
К оэффициентF1
называется в СЭП коэффициентом
успокоения двигателя
(в разделе ТЭП об электромеханических
свойствах двигателя этот коэффициент
назывался коэффициентом жесткости
механической характеристики
оэффициентF1
называется в СЭП коэффициентом
успокоения двигателя
(в разделе ТЭП об электромеханических
свойствах двигателя этот коэффициент
назывался коэффициентом жесткости
механической характеристики
![]() ).
).
Для асинхронного
двухфазного двигателя, применяемого в
СЭП, также справедливо выражение
![]() ,
где
,
где![]() – коэффициент жесткости механической
характеристики (см. рис. 10.3).
– коэффициент жесткости механической
характеристики (см. рис. 10.3).
В СЭП (особенно в маломощных приводах так называемого «приборного» типа) используются различные успокоители (гидравлические, пневматические, электромагнитные), меняющие момент сопротивления в функции скорости:
МС=МС0+F2, (10.5)
где F2 – коэффициент успокоения двигателя;
МС0=const – момент сопротивления, создаваемый трением в подшипниках.
Таким образом, из (10.3), (10.4) и (10.5) получается следующее уравнение движения СЭП:
![]() ,
(10.6)
,
(10.6)
где F=F1+F2 – коэффициент успокоения СЭП (в частном случае может быть F2=0 при отсутствии искусственного успокоителя).
Структурная схема механической части СЭП, соответствующая уравнению (10.6), показана на рисунке 10.4.
Э та
структурная схема показывает, что в
любом СЭП имеется отрицательная обратная
связь по скорости, стабилизирующая
(успокаивающая) движение. Эта отрицательная
обратная связь создается действием
противоЭДС двигателя (F1)
и успокоителем (F2).
та
структурная схема показывает, что в
любом СЭП имеется отрицательная обратная
связь по скорости, стабилизирующая
(успокаивающая) движение. Эта отрицательная
обратная связь создается действием
противоЭДС двигателя (F1)
и успокоителем (F2).
Так как при изучении СЭП интерес представляет угол поворота выходной оси (ВЫХ) и рассогласование (), то, кроме уравнения (10.6), надо учесть еще и следующие уравнения связи:
![]() ,
(10.7)
,
(10.7)
![]() .
(10.8)
.
(10.8)
Пусковой момент двигателя (МП) в СЭП с различными законами управления в общем случае можно представить как
![]() ,
(10.9)
,
(10.9)
где
![]() – функция, определяющая используемый
в СЭП закон управления.
– функция, определяющая используемый
в СЭП закон управления.
При «П»-законе
управления
![]() .
(10.10)
.
(10.10)
При «ПД»-законе управления
![]() .
(10.11)
.
(10.11)
При «ПИ»-законе управления
![]() .
(10.12)
.
(10.12)
При «ПИД»-законе управления
![]() .
(10.13)
.
(10.13)
Таким образом, в общем случае (то есть при использовании в СЭП любого закона управления) уравнение движения следящего электропривода получается при совместном решении следующей системы уравнений:

 (10.14)
(10.14)
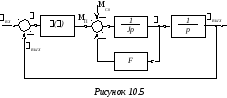
Структурная схема механической части СЭП в соответствии с уравнениями системы (10.14) показана на рисунке 10.5.
Звено
![]() – это система управления следящим
электроприводом, формирующая необходимый
закон управления.
– это система управления следящим
электроприводом, формирующая необходимый
закон управления.
10.3 Следящий электропривод с пропорциональным законом управления
Уравнение движения СЭП с пропорциональным управлением получается при совместном решении системы (10.14), в которой пусковой момент МП пропорционален рассогласованию , то есть записывается по (10.10).
При совместном решении исключаются МП, и ВЫХ и находится =f(ВХ, МС0, F, J).
![]() .
.
Подставляя сюда
значение
![]() ,
получаем:
,
получаем:
![]() .
(10.15)
.
(10.15)
Прежде чем анализировать уравнение движения (10.15), необходимо выяснить, какие применяются в СЭП законы движения входной оси – ВХ=f(t).
Этот закон может иметь произвольный характер (в соответствии с определением СЭП), при котором анализ работы электропривода в общем виде сделать нельзя.
Анализ работы СЭП по уравнению движения проводится при следующих возмущениях, близких к реальным:
Прием и сброс нагрузки на исполнительной оси (мгновенное изменение МС0).
Изменение ВХ по синусоидальному закону. Исполнительная ось в этом случае также движется по синусоидальному закону.
Задающая ось скачком (то есть мгновенно) перемещается на угол ВХ.З и останавливается, а исполнительная (выходная) ось воспроизводит это возмущение. Рассмотренный случай – движение так называемого позиционного электропривода (например, перестановка антенны локатора из одного сектора наблюдения в другой).
В этом случае рВХ=0 и р2ВХ=0. Уравнение движения (10.15) упрощается и принимает вид:
![]() .
(10.16)
.
(10.16)
В установившемся режиме (после отработки входного сигнала), когда р=0 и р2=0, будет:
![]() –это статическая
ошибка позиционного СЭП. В общем случае,
учитывая возможный колебательный
характер движения при уравнении (10.16)
получим, что
–это статическая
ошибка позиционного СЭП. В общем случае,
учитывая возможный колебательный
характер движения при уравнении (10.16)
получим, что
![]() .
(10.17)
.
(10.17)
Задающая ось перемещается с заданной постоянной скоростью ВХ.З=рВХ=const после скачка ее от нулевого значения (рис. 10.6).
В этом случае р2ВХ=0.
Уравнение движения СЭП (10.15) принимает вид:
![]() .
(10.18)
.
(10.18)
В установившемся режиме (р=0)
![]() ,
,
откуда
![]() .
(10.19)
.
(10.19)
Учтя возможный колебательный характер движения, установившаяся ошибка после окончания переходного процесса
![]() ,
(10.20)
,
(10.20)
где
![]() – установившаяся скоростная ошибка,
или так называемая кинетическая
погрешность СЭП;
– установившаяся скоростная ошибка,
или так называемая кинетическая
погрешность СЭП;
![]() –статическая
ошибка СЭП, обусловленная наличием
статического сопротивления, создаваемого
трением на исполнительной оси.
–статическая
ошибка СЭП, обусловленная наличием
статического сопротивления, создаваемого
трением на исполнительной оси.
П ри
переходном процессе создается и
динамическая ошибкаД
(см. рис. 10.6)
ри
переходном процессе создается и
динамическая ошибкаД
(см. рис. 10.6)
![]() ,
(10.21)
,
(10.21)
представляющая собой сумму частного решения У по выражению (10.19) при р=0 и общего решения П (то есть динамической ошибки при переходном процессе).
Учитывая сказанное ранее в разделе 10.1 о понятии добротности СЭП, можно следующим образом вычислить коэффициент добротности:
 .
Пренебрегая здесь малой величиной
.
Пренебрегая здесь малой величиной
![]() ,
получим, что
,
получим, что
![]() .
(10.22)
.
(10.22)
Соотношение (10.22)
ясно показывает, что добротность СЭП
тем больше, чем больше коэффициент
усиления К,
и что добротность уменьшается с ростом
коэффициента успокоения F.
При этом надо помнить, что есть некое
минимальное значение
![]() ,
определяемое жесткостью механической
характеристики двигателя, причемFМИН0.
,
определяемое жесткостью механической
характеристики двигателя, причемFМИН0.
Увеличение коэффициента усиления в СЭП ограничено условиями устойчивой работы.
В специальных системах СЭП с оптимальным управлением и скользящим режимом работы релейных усилителей коэффициент усиления очень велик (теоретически бесконечен, при частоте скольжения fС).
Такие СЭП разработаны на кафедре АЭМС ДГМИ.
Рассмотрим более подробно динамическую ошибку при переходном процессе (П) в СЭП с пропорциональным управлением. Величина этой ошибки не зависит от скорости вращения задающей оси, а определяется только параметрами СЭП.
Для определения величины П необходимо найти общее решение дифференциального уравнения (10.18). Соответствующее характеристическое уравнение
![]() (10.23)
(10.23)
имеет корни
![]() ,
(10.24)
,
(10.24)
или
![]() .
(10.25)
.
(10.25)
В выражениях (10.24) и (10.25):
![]() ,
(10.26)
,
(10.26)
– круговая частота затухающих колебаний, равная
![]() ,
(10.27)
,
(10.27)
где СОБ – собственная частота незатухающих колебаний при отсутствии успокоения, когда F=0, т.е.
![]() .
(10.28)
.
(10.28)
– коэффициент, характеризующий так называемую степень успокоения СЭП:
![]() .
(10.29)
.
(10.29)
В зависимости от
соотношения между параметрами F,
J
и К
следящей системы (то есть между
коэффициентами характеристического
уравнения) корни р1
и р2
могут быть действительными или
комплексными сопряженными величинами.
Так как эти параметры в рассматриваемой
системе всегда являются положительными
числами, то корни р1
и р2
всегда будут либо действительными
отрицательными величинами, либо
комплексными сопряженными величинами
с отрицательной вещественной частью.
Таким образом, СЭП, движение которого
описывается уравнением (10.18), всегда
является устойчивым. При
![]() ,
то есть при1,
корни р1
и р2
являются отрицательными действительными
числами. В этом случае динамическая
ошибка при неустановившемся движении
имеет апериодический характер изменения
и определяется по выражению:
,
то есть при1,
корни р1
и р2
являются отрицательными действительными
числами. В этом случае динамическая
ошибка при неустановившемся движении
имеет апериодический характер изменения
и определяется по выражению:
![]() ,
(10.30)
,
(10.30)
где А1 и А2 – постоянные интегрирования, определяемые по начальным условиям движения СЭП.
Апериодический режим в реальных следящих системах не применяется, так как в этом случае необходим очень большой коэффициент успокоения F, что, как это видно из выражения (10.19), значительно увеличивает динамическую ошибку установившегося режима У.
При
![]() ,
то есть при>1,
корни р1
и р2
являются комплексными сопряженными
числами с отрицательной вещественной
частью. В этом случае П
имеет характер затухающих колебаний и
определяется по выражению
,
то есть при>1,
корни р1
и р2
являются комплексными сопряженными
числами с отрицательной вещественной
частью. В этом случае П
имеет характер затухающих колебаний и
определяется по выражению
![]() ,
(10.31)
,
(10.31)
где А3 и А4 – постоянные интегрирования, определяемые по начальным условиям движения СЭП.
В соответствии с (10.21), (10.20) и (10.27) динамическая ошибка СЭП определяется по выражению
![]() .
(10.32)
.
(10.32)
Найдем постоянные А3 и А4, пренебрегая малой величиной статического момента, то есть полагая МС00.
При t=0 задающая и исполнительная оси находятся в согласованном положении и, следовательно, динамическая ошибка отсутствует (Д=0). Поэтому для t=0 уравнение (10.32) принимает вид:
![]() ,
,
откуда
![]() .
(10.33)
.
(10.33)
Постоянная А4
определяется на основании следующего
условия. При t=0,
когда на вход системы подан скачкообразный
сигнал и задающая ось начала вращаться
с постоянной скоростью
![]() ,
скорость исполнительной оси
,
скорость исполнительной оси![]() .
Поэтому приt=0
установившаяся динамическая ошибка
У=0
и, следовательно, в соответствии с
(10.21) Д=П.
Так как при t=0
рассогласование определяется лишь
неустановившейся динамической ошибкой,
то =П=ВХ-ВЫХ.
Соответственно,
.
Поэтому приt=0
установившаяся динамическая ошибка
У=0
и, следовательно, в соответствии с
(10.21) Д=П.
Так как при t=0
рассогласование определяется лишь
неустановившейся динамической ошибкой,
то =П=ВХ-ВЫХ.
Соответственно,
![]() ,
так как
,
так как![]() .
Продифференцировав (10.31), получим:
.
Продифференцировав (10.31), получим:
![]() .
.
Приняв здесь t=0,
найдем
![]() ,
откуда:
,
откуда:
![]() .
(10.34)
.
(10.34)
После обратной подстановки значений А3 и А4 в (10.32) при МС0=0 будем иметь:
![]() .
(10.35)
.
(10.35)
Преобразовав
(10.35) при помощи соотношений (10.26), (10.27) и
(10.29) таким образом, чтобы величина Д
была выражена лишь через собственную
частоту незатухающих колебаний СОБ
и степень успокоения ,
и учитывая, что
![]() (динамическая установившаяся ошибка),
получим:
(динамическая установившаяся ошибка),
получим:
![]() .
(10.36)
.
(10.36)
Формулы (10.35) и
(10.36) показывают, что если задающую ось
следящей системы скачком привести в
движение со скоростью ВХ.З,
то исполнительная ось начнет следовать
за задающей, совершая затухающие
колебания. Через некоторый отрезок
времени (а теоретически при t)
колебания исполнительной оси прекратятся,
и она будет вращаться с постоянной
скоростью ВХ.З
(при передаточном числе редуктора i=1),
но с отставанием по отношению к задающей
оси на величину динамической установившейся
ошибки
![]() .
.
Степень успокоения
системы
![]() связывает между собой параметры следящей
системыF,
J
и К.
Поэтому можно считать, что динамическая
ошибка системы зависит от величины .
Наиболее удобно анализировать влияние
степени успокоения на величину
динамической ошибки по выражению
(10.36). Определим изменение Д
при различных характерных значениях
,
считая, что параметры системы К
и J
постоянны (то есть
связывает между собой параметры следящей
системыF,
J
и К.
Поэтому можно считать, что динамическая
ошибка системы зависит от величины .
Наиболее удобно анализировать влияние
степени успокоения на величину
динамической ошибки по выражению
(10.36). Определим изменение Д
при различных характерных значениях
,
считая, что параметры системы К
и J
постоянны (то есть
![]() ),
а меняется лишь коэффициент успокоенияF.
),
а меняется лишь коэффициент успокоенияF.
= 1. В этом случае
 ,
и частота затухающих колебаний стремится
к нулю (0),
что видно из выражения (10.27). Уравнение
(10.36) при =1
принимает вид:
,
и частота затухающих колебаний стремится
к нулю (0),
что видно из выражения (10.27). Уравнение
(10.36) при =1
принимает вид:
![]() .
(10.37)
.
(10.37)
Выражение (10.37)
показывает, что при =1
колебания в
системе отсутствуют,
процесс изменения динамической ошибки
имеет апериодический характер. После
окончания переходного процесса (при
t)
динамическая ошибка
![]() очень велика, так как коэффициент
успокоенияF
в этом случае имеет значительную
величину.
очень велика, так как коэффициент
успокоенияF
в этом случае имеет значительную
величину.
0 < < 1. В данном случае, как уже указывалось ранее, корни характеристического уравнения р1 и р2 являются комплексными сопряженными величинами с отрицательной вещественной частью. Таким образом, система работает устойчиво с затухающими колебаниями. Колебания динамической ошибки в переходном процессе возрастают при уменьшении степени успокоения. Установившаяся динамическая ошибка в этом случае пропорциональна степени успокоения.
= 0. В этом случае F=0, СОБ. Из выражения (10.36) при =0 получим:
![]() .
(10.38)
.
(10.38)
Выражение (10.38) свидетельствует, что при =0 изменение динамической ошибки в переходном процессе имеет характер незатухающих колебаний с частотой собственных колебаний СОБ и амплитудой ВХ.З/СОБ. Динамическая установившаяся ошибка равна нулю. Система работает на границе устойчивости.
< 0, то есть F<0. В этом случае вещественная часть комплексных корней характеристического уравнения положительна, а, следовательно, работа СЭП неустойчива.
Для анализируемой следящей системы степень успокоения =0 и <0 физически невозможна, так как все коэффициенты дифференциального уравнения второго порядка положительны. Эти случаи рассмотрены лишь для общности выводов.
Анализ влияния степени успокоения на характер изменения динамической ошибки позволяет сделать следующие выводы:
Характер изменения Д=f(t) определяется величиной степени успокоения системы.
Установившаяся динамическая ошибка У пропорциональна величине степени успокоения.
Колебания динамической ошибки в переходном состоянии СЭП увеличиваются при уменьшении величины степени успокоения.
При расчете СЭП необходимо выбирать величину степени успокоения таким образом, чтобы максимальное значение колебаний динамической ошибки не превосходило величины, определяемой требованиями к СЭП. Обеспечить необходимое значение можно путем подбора параметров J, F и К следящей системы. Большое значение при этом имеет величина передаточного числа редуктора между валом двигателя и валом нагрузки (исполнительной осью). Чем больше будет передаточное число редуктора, тем меньше влияние момента инерции нагрузки. Как уже отмечалось, успокоение системы можно повысить применением специальных успокоителей. Кроме этого, можно обеспечить хорошее успокоение (стабилизацию СЭП) путем введения специальных отрицательных обратных связей.