

обеспечивая высокую точность работы.
Системы электропривода с релейным оптимальным управлением весьма перспективны для различных промышленных установок. Они изучаются в последующих за теорией электропривода дисциплинах.
Г л а в а о д и н н а д ц а т а я
ОБЩИЕ ПОЛОЖЕНИЯ
11.1 Терминология, классификация способов и показатели регулирования
Регулировать скорость какого-либо производственного механизма можно либо с помощью механической коробки передач, либо регулируя скорость приводного электродвигателя.
Не следует смешивать понятие регулирования скорости электропривода с естественным изменением скорости, возникающим при изменении статической нагрузки на валу двигателя. В этом случае скорость электродвигателя изменяется в соответствии с его электромеханическими свойствами (механической характеристикой).
Регулированием скорости электропривода называется принудительное изменение ее в соответствии с требованиями технологического процесса вне зависимости от постоянства или характера изменения нагрузки на валу двигателя. Такое регулирование осуществляется при ручном (с помощью человека) или автоматическом (с помощью специальных устройств) воздействии на электродвигатель.
Различают два способа регулирования фазовых координат, (то есть скорости, тока, напряжения, электромагнитного момента и др.) электропривода: параметрический и амплитудный.
Параметрическое регулирование электропривода – такое регулирование, которое осуществляется при принудительном воздействии на параметры электродвигателя (активные или реактивные сопротивления в цепях обмоток, число пар полюсов асинхронной машины).
Амплитудное регулирование электропривода – такое регулирование, которое осуществляется при принудительном воздействии на источники питания двигателя (напряжение на обмотках, частота тока в сети, питающей двигатель).
В современных электроприводах постоянного и переменного тока применяется как параметрическое, так и амплитудное регулирование двигателей. В разомкнутых электроприводах (то есть в электроприводах без внешних обратных связей) применяют параметрическое регулирование скорости, а в замкнутых электроприводах с внешними обратными связями применяют как параметрическое, так и амплитудное регулирование.
Изменение параметров электродвигателя или источника питания его может осуществляется плавно (непрерывно ) или импульсно. Поэтому различают параметрическое и амплитудное регулирование с плавным изменением параметров, а также импульсное параметрическое и импульсное амплитудное регулирование.
В теории электропривода используются также термины о параметрическом, амплитудном и импульсном способах управления энергией, подводимой к электродвигателю при регулировании его.
В излагаемой далее части курса теории электропривода рассматриваются, в основном, вопросы параметрического и амплитудного регулирования скорости в разомкнутых электроприводах.
Регулирование скорости и электромагнитного момента двигателя в замкнутых системах электропривода рассматривается здесь в ограниченном объеме, необходимом как подготовка к изучению курса “Системы управления электроприводами”, в котором замкнутые системы регулирования рассматриваются подробно.
При различных способах регулирования электроприводов необходимо сравнивать их, пользуясь основными п о к а з а т е л я м и р е г у л и р о в а н и я:
-
Диапазон регулирования скорости, определяемый как отношение установившихся значений макс и мин при заданной точности регулирования для установленных пределов изменения момента нагрузки –
D = макс /мин, (11.1)
где макс – максимальное значение скорости электродвигателя, ограниченное его коммутационной способностью или пределами прочности рабочей машины, передаточного устройства или двигателя;
мин – минимальное значение скорости, которое ограничивается точностью стабилизации этой фазовой координаты в конкретном электроприводе (точностью регулирования).
Точность регулирования
скорости электропривода определяется
жесткостью механической характеристики
двигателя. Если не задан диапазон
колебания статической нагрузки на валу
двигателя, то его, обычно, принимают
равным 2![]() ,
где
,
где
![]() –
расчетное значение момента статической
нагрузки (при отсутствии расчетного
значения
–
расчетное значение момента статической
нагрузки (при отсутствии расчетного
значения
![]() принимают
принимают
![]() =
=![]() ).
Тогда по известному минимальному
значению модуля коэффициента жесткости
механической характеристики определяется
мин (см.
рис. 11.1 ):
).
Тогда по известному минимальному
значению модуля коэффициента жесткости
механической характеристики определяется
мин (см.
рис. 11.1 ):
мин
=![]() /
/![]() ,
(11.2)
,
(11.2)
где
![]()
![]() ;
;
![]()
![]()
О бычно
диапазон регулирования электропривода
в соответствии с (11.1) выражается в виде
отношения чисел.
бычно
диапазон регулирования электропривода
в соответствии с (11.1) выражается в виде
отношения чисел.
Н апример,
3:1, 10:1,100:1 и т.д. Системы параметрического
регулирования скорости в разомкнутых
электроприводах обеспечивают небольшие
диапазоны регулирования (обычно в
пределах 2:1– 4:1).Современные
апример,
3:1, 10:1,100:1 и т.д. Системы параметрического
регулирования скорости в разомкнутых
электроприводах обеспечивают небольшие
диапазоны регулирования (обычно в
пределах 2:1– 4:1).Современные
системы регулирования скоростив замкнутых электроприводах обеспечивают значительно большие диапазоны регулирования скорости (Д=20:1,100:1,10000:1 и более).
2. Плавность регулирования. Этот показатель регулирования определяется изменением скорости при переходе с одной ступени регулирования к другой, ближайшей возможной. Оценивается плавность по так называемому коэффициенту плавности
![]() ,
(11.3)
,
(11.3)
где
![]() и
и
![]() скорости электропривода на i-й
и (i-1)-й– ступени
регулирования.
скорости электропривода на i-й
и (i-1)-й– ступени
регулирования.
Наилучшая плавность
регулирования при Кпл![]() 1
(число ступеней скорости при этом Z
1
(число ступеней скорости при этом Z![]() ).
).
Наименьшей плавностью обладают системы параметрического регулирования скорости асинхронных к.з. двигателей с переключением числа пар полюсов. Наибольшей – системы регулирования скорости плавным изменением величины напряжения или частоты источника питания, плавным изменением потока возбуждения электродвигателя постоянного тока.
3 .
Стабильность работы электропривода
с заданной скоростью определяется по
изменению этой скорости при заданном
отклонении нагрузки (
.
Стабильность работы электропривода
с заданной скоростью определяется по
изменению этой скорости при заданном
отклонении нагрузки (![]() )
на валу двигателя, то есть определяется
жесткостью механической характеристики.
)
на валу двигателя, то есть определяется
жесткостью механической характеристики.
На рисунке 11.2 показаны две механические характеристики электропривода с разной жесткостью.
Чем больше жесткость
(характеристика 1), тем меньше
колебанияскорости
![]() ,
при одном и том же изменении нагрузки
на
,
при одном и том же изменении нагрузки
на
![]() .
.
Меньшая жесткость
механических характеристик ведет к
большим колебаниям скорости (![]() ),
то есть к меньшей стабильности работы
электропривода (и к меньшему возможному
диапзону регулирования скорости).
),
то есть к меньшей стабильности работы
электропривода (и к меньшему возможному
диапзону регулирования скорости).
. Экономичность регулирования определяется величиной потерь энергии на регулирование ( эксплуатационные затраты), а также первоначальными капитальными затратами на сооружение электропривода (стоимость электрооборудования и аппаратов систем управления, стоимость фундаментов , системы вентиляции , монтажных работ и др.).
Эксплуатационные
затраты оцениваются по коэффициенту
полезного действия (![]() )
и коэффициенту мощности (
)
и коэффициенту мощности (![]() )
при регулировании скорости.
)
при регулировании скорости.
Так как
![]() и
и
![]() ,
зависят от скорости электропривода
,
зависят от скорости электропривода
![]() ,
то необходимо определять средние
величины этих показателей за весь
диапазон изменения
,
то необходимо определять средние
величины этих показателей за весь
диапазон изменения
![]() ,
а именно:
,
а именно:
![]()
![]()
![]() ,
(11.4 )
,
(11.4 )
![]()
 .
(11.5)
.
(11.5)
Обычно аналитические
зависимости
![]()
![]() )
и
)
и
![]() неизвестны.
неизвестны.
Поэтому при
практических расчетах определяются
так называемые средневзвешенные
величины
![]() и
и
![]() по их значениям при работе электропривода
с различными скоростями:
по их значениям при работе электропривода
с различными скоростями:
![]() ,
(11.6)
,
(11.6)
![]() .
(11.7)
.
(11.7)
5. Направление
регулирования скорости определяется
уменьшением или увеличением ее по
отношению к основной скорости (как
правило, по отношению к номинальной
скорости
![]() ).
).
Различают однозонное
регулирование вниз от
![]() и однозонное регулирование вверх
от
и однозонное регулирование вверх
от
![]() .
Например, в двигателях постоянного тока
или в асинхронных двигателях введение
добавочных сопротивлений в якорь (ротор)
приводит к снижению скорости, то есть
к регулированию вниз. Ослабление
магнитного потока в двигателе постоянного
тока с независимым возбуждением (в зоне
статических нагрузок до опрокидывания
регулирования) приводит к увеличению
скорости, то есть к регулированию вверх.
То же происходит при увеличении частоты
питающего напряжения в асинхронном
двигателя (
.
Например, в двигателях постоянного тока
или в асинхронных двигателях введение
добавочных сопротивлений в якорь (ротор)
приводит к снижению скорости, то есть
к регулированию вниз. Ослабление
магнитного потока в двигателе постоянного
тока с независимым возбуждением (в зоне
статических нагрузок до опрокидывания
регулирования) приводит к увеличению
скорости, то есть к регулированию вверх.
То же происходит при увеличении частоты
питающего напряжения в асинхронном
двигателя (![]() ).
).
6. Допустимая нагрузка при регулировании скорости –важнейший показатель способа регулирования.
Этот показатель устанавливает то наибольшее значение момента, которое способен развивать двигатель при длительной работе на регулировочной характеристике. Этот момент определяется максимально допустимым нагревом двигателя, и для разных способов регулирования он будет различным.
Недогрузка двигателя
ведет, как известно, к ухудшению
эксплуатационных показателей
электропривода (уменьшению К.П.Д. и
![]() ).
).
Поэтому необходимо применять такой способ регулирования привода, при котором двигатель был бы полностью (или почти полностью) загружен при всех скоростях.
Допустимая нагрузка (максимальный момент) двигателя ограничивается степенью его нагрева, которая в свою очередь зависит от потерь энергии, выделяющихся в машине, то есть зависит главным образом от тока, потребляемого двигателем. Отсюда следует вывод о том, что условием полного использования по нагреву при длительной работе на регулировочной характеристике является постоянство тока нагрузки. Если при работе на всех характеристиках ток нагрузки будет равен номинальному значению, то это будет означать, что двигатель загружен полностью при всех скоростях вращения. При этом предполагается, что условия охлаждения двигателя остаются неизменными вне зависимости от его скорости.
Другими словами,
если
![]() и iв = iвн,
то двигатель, даже работая длительно,
не перегревается. При этом можно
считать Мн допустимым
моментом нагрузки на валу двигателя.
Это утверждение справедливо, когда
и iв = iвн,
то двигатель, даже работая длительно,
не перегревается. При этом можно
считать Мн допустимым
моментом нагрузки на валу двигателя.
Это утверждение справедливо, когда
![]() ,
то есть когда двигатель работает с
нормальной (проектной) вентиляцией,
обеспечивая расчетный отвод потерь.
,
то есть когда двигатель работает с
нормальной (проектной) вентиляцией,
обеспечивая расчетный отвод потерь.
Для самовентилируемых
машин (при
![]() )
при
)
при
![]() ухудшается теплоотвод, и при
ухудшается теплоотвод, и при
![]() двигатель может перегреться. Поэтому
следует определять Мдоп, который
соответствует всем значениям скорости
самовентилируемого двигателя. Для
закрытых двигателей и для двигателей
с принудительной вентиляцией (то есть
при
двигатель может перегреться. Поэтому
следует определять Мдоп, который
соответствует всем значениям скорости
самовентилируемого двигателя. Для
закрытых двигателей и для двигателей
с принудительной вентиляцией (то есть
при
![]() )
допустимый момент
)
допустимый момент
![]() не зависит от скорости вращения
не зависит от скорости вращения
![]() .
.
Различают производственные механизмы, требующие регулирования скорости при постоянном моменте (М = Const) или регулирования скорости при постоянной мощности (P = Const), а именно:
а) М = Const – грузоподъемные механизмы, механизмы прокатных станов, механизмы горизонтального передвижения грузов (крановые тележки, слитковозы, толкатели, рольганги), то есть механизмы, у которых момент сопротивления движению (Мс) определяется силами трения или гравитационными силами;
б) Р = Const
– шпиндели токарных и карусельных
станков , где главное – постоянство
линейной скорости резания и усилия
резания, то есть Р=FV=Const;
моталки и разматыватели станов холодной
и горячей прокатки , где необходимо
поддерживать постоянство натяжения
(Т ) и линейной скорости ( V
) при
![]()
![]() то
есть Р = VT = const.
то
есть Р = VT = const.
Регулирование при М = Const и Р = Const соответствует двум зонам изменения скорости :
0<
![]() и
и
![]() .
.
Рассмотрим эти зоны на примере двигателя постоянного тока с независимым возбуждением (см. рис. 11.3).

Допустимый момент
нагрузки в каждой зоне зависит от способа
регулирования. Зона I
-![]() зона
регулирования двигателя с постоянным
моментом. В этой зоне регулирование
осуществляется изменением сопротивления
в цепи якоря или напряжением на якоре
при неизменном номинальном магнитном
потоке (Фн = Const).
зона
регулирования двигателя с постоянным
моментом. В этой зоне регулирование
осуществляется изменением сопротивления
в цепи якоря или напряжением на якоре
при неизменном номинальном магнитном
потоке (Фн = Const).
Полное использование двигателя по нагреву будет при
![]()
![]()
![]() .
.
При этом мощность на валу двигателя меняется по линейному закону
![]()
З о н а II – зона регулирования двигателя с постоянной мощностью. Регулирование производится изменением (ослаблением ) магнитного потока двигателя. В этом случае при I = Ic = Iн = Const и Uя = Const
![]()
![]()
![]()
Момент двигателя меняется по гиперболическому закону.
![]()
При вентиляторном моменте сопротивления двигатель нельзя полностью нагрузить при низких скоростях вращения, так как при увеличении скорости будет увеличиваться и Mc (по параболическому закону).
В этом случае приходится выбирать мощность двигателя по моменту нагрузки, соответствующему максимальной скорости, мирясь с недоиспользованием (недогрузкой) двигателя при низких скоростях.
![]()
В электроприводах с самовентилирумыми двигателями, как указывалось выше, при снижении угловой скорости (в зоне I) соответственно уменьшается и величина допустимых потерь, то есть I.
При малых скоростях такие двигатели должны работать с I < Iн и Мдоп < Мн..
![]()
Все вышеизложенное о допустимой нагрузке двигателя при регулировании относится к двигателям постоянного тока с независимым возбуждением, имеющим обычную петлевую (одноходовую) обмотку якоря. Допустимый момент Мдоп существенно зависит от конструкции (типа) обмотки якоря двигателя.
От типа обмотки
якоря зависят и характеристики
![]() и
и
![]() допустимой нагрузки при регулировании
(рис. 11.4).
допустимой нагрузки при регулировании
(рис. 11.4).
Для двигателей с одноходовой (петлевой) обмоткой якоря среднее напряжение между соседними коллекторными пластинами (ек) значительно (в 2раза) выше, чем в обмотках двухходовых. Поэтому в двигателях с одноходовой обмоткой якоря регулирование скорости увеличением напряжения свыше Uн недопустимо из-за резкого нарушения коммутации (начинается искрение на коллекторе).
Для двигателей с
двухходовой обмоткой якоря ек
значительно меньше, поэтому возможно
увеличение нап ряжение
на якоре до 2Uн.
ряжение
на якоре до 2Uн.
Для обоих типов
электрических машин при
![]()
![]() необходимо при регулировании скорости
снижать ток по условиям безискровой
коммутации. При этом снижается и
допустимый момент (
необходимо при регулировании скорости
снижать ток по условиям безискровой
коммутации. При этом снижается и
допустимый момент (![]() ).
).
При этом у двигателей
с двухходовой обмоткой якоря необходимость
снижения тока и
![]() наступает при больших значениях скорости
(примерно при
наступает при больших значениях скорости
(примерно при
![]() ).
Это и определяет лучшую характеристику
).
Это и определяет лучшую характеристику
![]() для
таких машин.
для
таких машин.
Г л а в а д в е н а д ц а т а я
ПАРАМЕТРИЧЕСКОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ В РАЗОМКНУТЫХ ЭЛЕКТРОПРИВОДАХ
12.1 Параметрическое регулирование скорости в электроприводах постоянного тока
Параметрическое регулирование скорости в электроприводах постоянного тока возможно при изменении добавочных сопротивлений в цепи якоря (так называемое параметрическое реостатное регулирование) или в цепи обмотки независимого возбуждения (для двигателей с независимым или смешанным возбуждением).
Регулировочный реостат в цепи якоря двигателя ( в отличии от пускового сопротивления) должен быть рассчитан в соответствии с режимом работы электропривода на более длительное время включения , чем время пуска.
При реостатном регулировании изменяется жесткость механических характеристик и, следовательно, стабильность работы на данной характеристике при изменении нагрузки.
При реостатном параметрическом регулировании скорость электропривода регулируется только вниз от основной скорости на естественной характеристике.
При реостатном параметрическом регулировании скорости потери в цепи якоря пропорциональны снижению скорости. Это легко доказать следующими рассуждениями.
Из уравнения
электрического равновесия цепи якоря
двигателя
![]() следует уравнение баланса мощности
следует уравнение баланса мощности
![]()
или
![]()
![]() , (12.1)
, (12.1)
где
![]()
![]()
![]() – мощность, потребляемая двигателем
из сети постоянного тока;
– мощность, потребляемая двигателем
из сети постоянного тока;
![]() EI
= P2 – полезная
механическая мощность, развиваемая
двигателем ;
EI
= P2 – полезная
механическая мощность, развиваемая
двигателем ;
![]() –
потери мощности
в якорной цепи.
–
потери мощности
в якорной цепи.
Механические потери на трение в подшипниках двигателя и трение о воздух не учитывается.
Из соотношения (12.1) следует, что
![]() =
=![]()
![]()
![]()
![]()
![]() ,
(12.2)
,
(12.2)
где S – “скольжение” якоря двигателя.
Из (12.2) видно, что
снижение скорости двигателя то есть
увеличение S по сравнению
с S Н
![]() значительно увеличивает потери
энергии в якоре двигателя.
значительно увеличивает потери
энергии в якоре двигателя.
Низкую экономическую
эффективность параметрического
регулирования скорости двигателя можно
подтвердить, проанализировав изменение
К.П.Д. (![]() )
при регулировании
)
при регулировании
![]() .
(12.3)
.
(12.3)
Выражение (12.3)
показывает, что К.П.Д. электропривода
уменьшается пропорционально снижению
относительной скорости двигателя. Это
накладывает ограничение на возможный
диапазон реостатного регулирования
скорости. На рисунке 12.1 показаны
механические характеристики при
реостатном регулировании скорости для
нагрузки
![]() и диапазоне регулирования
и диапазоне регулирования
![]() D=
D=![]() Колебания нагрузки на
Колебания нагрузки на
![]() вызывают существенную нестабильность
работы (колебания скорости двигателя
на
вызывают существенную нестабильность
работы (колебания скорости двигателя
на
![]() ).
).
Поэтому в современных электроприводах постоянного тока параметрическое регулирование скорости имеет очень ограниченное применение и только для двигателей небольшой мощности (до 1-2 кВт) при диапазоне регулирования D=1/1.5 – 1/2.
К
 параметрическому реостатному регулированию
скорости электропривода постоянного
тока относится также регулирование,
получаемое при шунтировании цепи якоря
добавочным сопротивлением. Шунтирование
якоря двигателя с независимым возбуждением
подробно рассмотрены в [1, раздел 9], оно
используется для простого способа
получения жестких механических
характеристик при малых скоростях
двигателя (см. рис. 12.2) и при ограниченном
диапазоне регулирования(D=2-3/
1).
параметрическому реостатному регулированию
скорости электропривода постоянного
тока относится также регулирование,
получаемое при шунтировании цепи якоря
добавочным сопротивлением. Шунтирование
якоря двигателя с независимым возбуждением
подробно рассмотрены в [1, раздел 9], оно
используется для простого способа
получения жестких механических
характеристик при малых скоростях
двигателя (см. рис. 12.2) и при ограниченном
диапазоне регулирования(D=2-3/
1).
Шунтирование якоря и обмотки последовательного возбуждения подробно рассмотрено в [1, раздел 10] , оно применяется для получения механических характеристик двигателей с последовательным возбуждением в подъёмных механизмах.
Механические и электромеханические характеристики электропривода постоянного тока при изменении магнитного потока двигателя были рассмотрены ранее в [1, раздел 12.1]. Вспомним, что ослабление магнитного потока при значительных нагрузках на валу двигателя может вызвать явление опрокидывания регулирования, то есть уменьшение скорости двигателя. При ослаблении магнитного потока жесткость механических характеристик уменьшается, уменьшатся и возможный диапазон регулирования.
Подводя итог сказанному о параметрическом регулировании скорости двигателей постоянного тока надо сделать вывод о неэкономичности данного способа (большие потери в якоре), о незначительном (2-3/1) диапазоне регулирования из-за уменьшения жесткости механических характеристик, уменьшении Мдоп при снижении скорости вентилируемых двигателей и о нестабильности этого способа регулирования при колебаниях нагрузки на валу двигателя.
В силу указанных причин реостатное параметрическое регулирование применяется очень редко и только для электроприводов малой и средней мощности, работающих в повторно-кратковременном режиме.
12.2 Параметрическое регулирование скорости асинхронных электроприводов
Асинхронные двигатели обладают существенными преимуществами перед двигателями постоянного тока (простота и надежность конструкции, дешевизна, возможность регулирования скорости в небольших пределах без специальных преобразователей). Несмотря на простоту параметрических способов регулирования скорости у асинхронных двигателей, они обладают существенными недостатками – незначительная плавность и низкие экономические показатели.
Потери мощности
![]() в АД можно представить (не учитывая
незначительных потерь в стали и
механических потерь на трение в
подшипниках и о воздух) следующим
образом:
в АД можно представить (не учитывая
незначительных потерь в стали и
механических потерь на трение в
подшипниках и о воздух) следующим
образом:
![]() Р
= Р1 – Р2,
(12.4)
Р
= Р1 – Р2,
(12.4)
где Р1– мощность забираемая из сети;
Р2 – полезная мощность на валу двигателя.
Выражение (12.4) преобразуем следующим образом:
![]()
![]() (12.5)
(12.5)
Таким образом потери в АД выражаются аналогично потерям в двигателе постоянного тока по выражению (12.2).
Реостатное параметрическое регулирование скорости АД осуществляется при введении сопротивлений в цепь ротора. Такое регулирование скорости осуществляется только вниз от скорости на естественной механической характеристике. Плавность регулирования весьма мала из-за малого числа ступеней регулирующих резисторов. Как и для двигателей постоянного тока, при введении сопротивлений в ротор значительно уменьшается жесткость механических характеристик АД на рабочем участке (0<M<0.85Mk).
Выясним
связь диапазона регулирования скорости
D =![]() c жесткостью механической
характеристики двигателя, рассматривая
работу АД на искусственной реостатной
механической характеристике при
номинальной нагрузке (Мс = Мн).
c жесткостью механической
характеристики двигателя, рассматривая
работу АД на искусственной реостатной
механической характеристике при
номинальной нагрузке (Мс = Мн).
Из известного
соотношения для скольжения АД (S=![]() )
следует, что
)
следует, что
![]() .
При указанных условиях работы (см. рис.
12.3) на реостатной характеристике с
номинальной нагрузкой скорость и
скольжение при этой номинальной нагрузке
будут соответственно
.
При указанных условиях работы (см. рис.
12.3) на реостатной характеристике с
номинальной нагрузкой скорость и
скольжение при этой номинальной нагрузке
будут соответственно
![]() и S(н).
и S(н).
Модуль жесткости реостатной характеристики
![]() ,
(12.6)
,
(12.6)
о ткуда
скольжение на реостатной характеристике
при номинальной нагрузке равно:
ткуда
скольжение на реостатной характеристике
при номинальной нагрузке равно:
![]() (12.7)
(12.7)
Диапазон регулирования
скорости на реостатной характеристике
![]()
![]() ,
или
,
или
D
(1-![]() )
= 1– SН.
(12.8)
)
= 1– SН.
(12.8)
Подставляя в (12.8) значение S(Н) по (12.7), получим
![]()
![]() откуда
откуда
![]()
![]() (12.9)
(12.9)
Это соотношение показывает, что чем больше диапазон регулирования, тем меньше модуль жесткости реостатной характеристики двигателя, то есть тем больше ее наклон к оси абсцисс и меньше стабильность работы электропривода при колебаниях нагрузки.
Н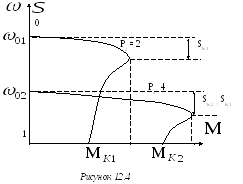 апример,
при D =2 и Sн
= 0.05 по соотношению (12.9) получим
апример,
при D =2 и Sн
= 0.05 по соотношению (12.9) получим
![]() ,
а при D=3 и SН=0,05,
,
а при D=3 и SН=0,05,
![]() .
.
К параметрическому регулированию скорости АД относится также и регулирование изменением (переключением) числа пар полюсов (р) обмотки статора.
Механические характеристики АД при изменении р рассматривались ранее в ( 1, раздел 11.6 ) , где было показано , что
![]()
![]() (12.10)
(12.10)
Вспомним, что в соответствии с (12.10) механические характеристики АД представлены на рисунке2.4.
Производятся к.з. А.Д. с изменением числа пар полюсов в 2,3 и (редко) в 4 раза.
Регулирование скорости изменением числа пар полюсов приводит к уменьшению критического момента двигателя при уменьшении р, то есть к снижению перегрузочной способности АД.
Основные недостатки параметрического регулирования скорости АД:
– необходимость в дискретном изменении сопротивления в роторной цепи или числа полюсов обмотки статора, что требует коммутационной аппаратуры с дистанционным или ручным управлением (контакторы, барабанные контроллеры или специальные переключатели). Это делает невозможным использование параметрических методов регулирования в замкнутых системах асинхронного электропривода ;
– большие потери энергии при реостатном регулировании в роторных цепях;
– низкое быстродействие и малая плавность.
Из-за этих недостатков, но благодаря своей простоте, параметрическое регулирование скорости все же находит ограниченное применение в электроприводах подъемно транспортных устройств, работающих в повторно– кратковременном режиме, а также для насосов и вентиляторов малой и средней мощности.