

13.3 Разновидности систем г-д (историческая справка)
В процессе развития техники электроприводы по системе Г-Д также претерпели ряд изменений для удовлетворения различных технологических или конструктивных требований.
При больших мощностях электрических машин (более 500– 1000кВт) реостаты в цепях возбуждения генератора и двигателя достигают таких размеров и мощности, которые делают затруднительным и сложным управление ими даже с помощью сервомоторов (дополнительных электроприводов реостатов).
В некоторых случаях надо было уменьшить влияние реакции якоря, чтобы расширить диапазон регулирования, или использовать большой диапазон регулирования скорости без применения сети постоянного тока для питания обмоток возбуждения электрических машин.
В специальных системах Г-Д можно было получить механические характеристики экскаваторного типа.
Далее в очень сжатой форме показано развитие электроприводов по системе Г-Д. Эта информация дает возможность понять тенденции развития техники и несколько расширить эрудицию специалиста.
13.3.1 Квадратичная система г-д
В этой системе обмотки возбуждения
генератора и двигателя получают питание
от возбудителей, которые в свою очередь
возбуждаются от подвозбудителей, как
это показано на схеме рисунка 13.3 .
Разрядные сопротивление в схемахобмотоквозбуждения на рисунке 13.3
не показаны. Управление системой Г-Д
сосредоточено в цепях возбуждения
возбудителейG2 иG3
(обмоткиOBG2 иOBГ3)
, мощность которых незначительна.
этой системе обмотки возбуждения
генератора и двигателя получают питание
от возбудителей, которые в свою очередь
возбуждаются от подвозбудителей, как
это показано на схеме рисунка 13.3 .
Разрядные сопротивление в схемахобмотоквозбуждения на рисунке 13.3
не показаны. Управление системой Г-Д
сосредоточено в цепях возбуждения
возбудителейG2 иG3
(обмоткиOBG2 иOBГ3)
, мощность которых незначительна.
Установленная мощность электрических машин в квадратичной системе увеличивается. Снижение мощности управления сопровождается суммарным увеличением электромагнитной инерции в цепях всех обмоток
возбуждения. Для электроприводов с мощностью главных машин в 4-5 тыс. кВт использовалась так называемая кубичная система Г– , инерционность которой была еще больше.
В
Рисунок 13.3
13.3.2 Системы г-д с согласно встречным включением электрических машин.
Системы Г-Д с согласно – встречным включением электрических машин применялись с целью расширения диапазона регулирования скорости (по сравнению с обычной системой Г-Д ) электроприводов малой и средней мощности (до 50кВт ).
Использовались два варианта систем Г-Д такого типа:
а) Система с питанием двигателя от сети и вспомогательного генератора.
Схема этой системы электропривода показана на рисунке 13.4.
Двигатель М и вспомогательный генераторGвыбирались со следующими номинальными
параметрами:![]() UMH=2UC=2UGH;IG=IM;UGH=UC;PGH=0.5PMH.
UMH=2UC=2UGH;IG=IM;UGH=UC;PGH=0.5PMH.
Предпуском двигателя М включается генератор и его возбуждение (на рисунке 13.4 приводной двигатель генератора не показан). Изменением возбуждения Gдобиваются соотношения напряженийUG=UC(при этом сеть и генератор включены встречно). ТогдаUM =UC –UG = 0 .
П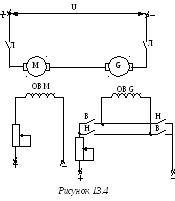 осле
включения линейного контактора Л
постепенно уменьшают возбуждение и
напряжениеUG
до нуля. При этом напряжение на
двигателеUMувеличивается до напряжения сетиUC,
и двигатель разгоняется. После этого
(приUG=0)
переключается полярность возбуждения
генератора, генератор возбуждается до
своего полного напряжения, но с обратной
полярностью. ТеперьUM=UC+UG.
осле
включения линейного контактора Л
постепенно уменьшают возбуждение и
напряжениеUG
до нуля. При этом напряжение на
двигателеUMувеличивается до напряжения сетиUC,
и двигатель разгоняется. После этого
(приUG=0)
переключается полярность возбуждения
генератора, генератор возбуждается до
своего полного напряжения, но с обратной
полярностью. ТеперьUM=UC+UG.
За счет увеличения UMдо значения 2UC двигатель разгоняется до номинальной скорости. Дальнейшее увеличение скорости двигателя, как в обычной системе Г-Д, возможно за счет ослабления поля двигателя.
б) Система с питанием двигателя от двух генераторов с согласно-встречным включением.
Схема этой системы электропривода показана на рисунке 13.5. Здесь G1-основной генератор, напряжение которого не реверсируется, аG2 – вспомогательный генератор с реверсивным напряжением. Параметры электрических машин выбираются следующим образом :
PG1H =PG2H = 0.5PMH;UG1 =UG2 = 0.5UMH.
Принцип работы этой системы Г-Д такой – же, как и ранее рассмотренной на рисунке 13.4. Роль питающей сети выполняет основной генератор G1.
С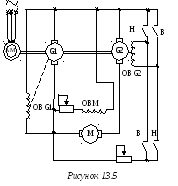 истема
Г-Д со схемой по рисунку 13.5 применялась
для больших мощностей машин (до 500кВт)
и, например, широко использовалась для
электропривода бумажных машин.
истема
Г-Д со схемой по рисунку 13.5 применялась
для больших мощностей машин (до 500кВт)
и, например, широко использовалась для
электропривода бумажных машин.
Д о с т о и н с т в о м систем электропривода с согласно – встречным включением электрических машин по рисунку 13.4 и рисунку 13.5 является большой(по сравнению с классической системой Г-Д) диапазон регулирования скорости:
DP
= D1
. D2=![]()
Увеличение диапазона регулирования достигается благодаря меньшему влиянию реакции якоря при низкой скорости двигателя (при этом регулируемый генератор имеет полный магнитный поток). Ради этого и были созданы такие системы Г-Д.
Н е д о с т а т к а м и подобных систем Г-Д являлись :
малый КПД (
 из-за многократного преобразования
энергии;
из-за многократного преобразования
энергии;
2) большая установленная мощность машин;
3) неустойчивая
работа электропривода при скорости
![]() из-за влияния реакции якоря при
напряженияхUG
(в схеме рис. 13.4) илиUG2
(в схеме рис.3.5) близких к нулю.
из-за влияния реакции якоря при
напряженияхUG
(в схеме рис. 13.4) илиUG2
(в схеме рис.3.5) близких к нулю.
Из-за указанных недостатков системы Г-Д с согласно – встречным включением электрических машин применялись в основном для нереверсивных электроприводов с большим DP.