

Механические характеристики двигателя в системе г-д
В [5] было показано, что при питании цепи якоря двигателя от сети с постоянным напряжением механическая характеристика его описывается уравнением
![]() (13.1)
(13.1)
где
![]() – сопротивление цепи якоря двигателя;
– сопротивление цепи якоря двигателя;
Ф – магнитный поток двигателя(в общем случае Ф >< Фн ), а электромеханическая характеристика двигателя:
![]() .
(13.2)
.
(13.2)
Чтобы получить уравнение механической характеристики двигателя в системе Г-Д необходимо в (13.1) принять вместо UН напряжение генератораUГ, а величинуRрассчитывать с учетом сопротивления обмоток и генератора и двигателя, а также соединительных проводов и щеток обеих машин, то есть
![]() (13.3)
(13.3)
где rягиrяд – сопротивления обмоток якорей генератора и двигателя;
rкг иrкд – сопротивления компенсационных обмоток;
rдг иrдд – сопротивления дополнительных полюсов;
![]() –падение на
щетках якоря одной машины;
–падение на
щетках якоря одной машины;
![]() –ток
статической нагрузки
двигателя, определяемый
по величине статического
момента.
–ток
статической нагрузки
двигателя, определяемый
по величине статического
момента.
Коэффициент 1,1 учитывает сопротивление соединительных проводов между генератором и двигателем.
При практических расчетах все величины сопротивлений в (13.3 ) надо брать в горячем состоянии.
Напряжение
генератора U![]() определяется по выражению:R
определяется по выражению:R
![]()
![]() R
R![]() ,
(13.4)
,
(13.4)
где R![]() r
r![]() +r
+r![]() +r
+r
![]() +
+
![]() – сопротивление обмоток в якорной цепи
генератора.
– сопротивление обмоток в якорной цепи
генератора.
С учетом (13.3 ) и (13.4) уравнения механической и электромеханической характеристик двигателя в системе Г-Д запишутся следующим образом :
![]() (13.5)
(13.5)
![]() (13.6)
(13.6)
Из этих уравнений следует :
![]() >
>![]()
 .
.
Таким образом в
системе Г-Д по сравнению с электроприводом,
питающимся от сети с U=UНи работающим при Ф = ФН ,
увеличиваются скорость идеального
холостого хода (![]() )
и падение скорости
)
и падение скорости![]() ,то
есть механическая и электромеханическая
характеристики двигателя в системе Г-Д
имеют меньшую жесткость из-за повышенного
падения напряжения в цепи якорей.
Механические характеристики двигателя
в системе Г-Д показаны на рисунке 13.2.
,то
есть механическая и электромеханическая
характеристики двигателя в системе Г-Д
имеют меньшую жесткость из-за повышенного
падения напряжения в цепи якорей.
Механические характеристики двигателя
в системе Г-Д показаны на рисунке 13.2.
Диапазон регулирования скорости двигателя в системе Г-Д.
В 1-ой зоне регулирования за счет изменения ФГпри ФД=Constможно получить диапазон регулирования скорости внизD1 =10/1.
Во второй зоне регулирования при ФГ =Constи ФД =Varза счет ослабления магнитного потока двигателя можно обеспечить регулирование вверх в диапазонеD2 = 2– 3/1. Верхний предел скорости двигателя ограничены условиями нормальной (без искровой) коммутации.
При неизменной
статической нагрузке МСпри
ослаблении ФД растет ток
якоря в двигателе, что при чрезмерном
ослаблении потока приведет к появлению
искрения в коллекторе.![]()
Н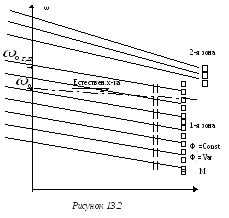 ижний
предел регулирования скорости ограничен
величиной остаточного напряжения
генератора, которое составляет
ижний
предел регулирования скорости ограничен
величиной остаточного напряжения
генератора, которое составляет![]()
![]() .
Кроме того, при малых напряжениях
генератора падение напряжения в якорной
цепи становится соизмеримым с напряжением
на зажимах генератора, и поэтому работа
двигателя становится неустойчивой
(даже при не больших колебаниях нагрузки
возможны резкие колебания скорости
двигателя вплоть до остановки его).
.
Кроме того, при малых напряжениях
генератора падение напряжения в якорной
цепи становится соизмеримым с напряжением
на зажимах генератора, и поэтому работа
двигателя становится неустойчивой
(даже при не больших колебаниях нагрузки
возможны резкие колебания скорости
двигателя вплоть до остановки его).
При малых Фг и ЕГна устойчивость работы двигателя сильно влияет также размагничивающее действие реакции якоря генератора.
Таким образом полный диапазон регулирования скорости двигателя в системе Г-Д составит
![]()
Преимущества электропривода по системе Г – Д:
Большой диапазон регулирования скорости, удовлетворяющий технологическим требованиям очень большого числа производственных механизмов. Получается такой диапазон регулирования в очень простой схеме разомкнутого электропривода.
Управление всеми процессами пуска, реверса торможения и регулирования скорости двигателя производится в цепях возбуждения электрических машин с небольшими токами, что упрощает и удешевляет аппаратуру. Малая мощность управления дает возможность легче обеспечить автоматизации управления (в том числе и бесконтактного).
3. Небольшие потери мощности при регулировании скорости двигателя.
Недостатки электропривода в системе Г-Д:
Большая (3-х кратная) установленная мощность электрических машин.
Большие капитальные затраты на электрические машины и на строительно-монтажные работы (фундаменты, подвод энергии и ошиновка , вентиляция).
Низкий КПД из-за многократного преобразования электроэнергии в двигателях и генераторе.
Большая крутизна механических характеристик по сравнению с крутизной характеристик отдельного двигателя, питающего от сети с номинальным напряжением.
Большая электромагнитная инерция в обмотках возбуждения двигателя и генератора, что уменьшает быстродействие электропривода.
Последний недостаток (большая инерционность обмоток возбуждения) является основным недостатком систем Г-Д, благодаря которому они не выдержали конкурентной борьбы с малоынерционными системами на базе вентильных преобразователей энергии, как это будет показано далее.
Применяемые в настоящее время системы Г-Д – это компромисс классических систем, существующих с начала 20-го века, с современными системами электропривода, использующими вентильные преобразователи. Это системы Г-Д с вентильным возбуждением генератора и двигателя, в которых при большой мощности главных машин можно не применять каскад электромашинных возбудителей и этим несколько уменьшить инерционность и повысить быстродействие.