

7.3. Пневматические регуляторы и приборы
Автоматическая система регулирования ТОУ, построенная на ПСА, состоит в общем случае (рис. 7.17) из датчика (Д), вторичного прибора (ВП), задатчика (ЗД), пневматического регулятора (ПР), линии связи (ЛС), исполнительного механизма (ИМ) и регулирующего органа (РО). Датчик Д вырабатывает унифицированный пневматический сигнал, пропорциональный значениям координаты у ТОУ; при использовании в АСР датчика с электрическим выходом необходима установка дополнительного электропневмопреобразователя (ЭПП). Пневматический сигнал от Д вводят в регулятор ПР и одновременно - во вторичный показывающий (и регистрирующий) прибор, ВП, снабженный станцией управления СУ для задания автоматического, программного или ручного дистанционного режима работы системы регулирования. Регулятор ПР в соответствии с одним из типовых законов регулирования вырабатывает командный сигнал, поступающий по линии связи (пневмопроводу длиной до 250- 300 м) на пневматический мембранный исполнительный механизм.

Рис. 7.17. Структурная схема пневматической АСР
В динамическом отношении мембранные ИМ в области частот [0, 0,3] рад/с рассматривают как последовательное соединение апериодического звена с малой (порядка нескольких секунд) постоянной времени и усилителя с зоной гистерезиса 2-10%. При длине пневмолинии более 100-150 м ИМ оборудуют усилителями мощности и охватывают жесткой отрицательной обратной связью по перемещению РО. При использовании таких позиционеров ИМ принимают за линейное усилительное звено, не влияющее на динамические характеристики пневматического регулятора и всей АСР.
Пневматические регуляторы. Применяемые в ПСА регуляторы имеют одинаковую функциональную структуру (рис. 7.17): сумматор для сравнения сигналов от датчика Д, устройства обратной связи ОС и задатчика ЗД; усилитель давления с большим коэффициентом передачи Ку; оконечный усилитель мощности и ОС с передаточной функцией W0(p). При Ку>>1 динамику линеаризованного в малом регулятора приближенно описывают передаточной функцией W0-1(p) что позволяет формировать нужный закон всей АСР подбором инверсных характеристик устройства обратной связи.
Для автоматизации химических производств в основном применяют пневматические регуляторы системы "Старт", построенные на элементах УСЭППА и частично КЭМП (встроенные регуляторы типа 04, ПР3.27М серийно не выпускают). Эти регуляторы построены по принципу компенсации сил, что обеспечивает высокую точность (статическая погрешность 0,51,0%) реализации позиционного, П-, ПИ-, ПД- и ПИД-законов регулирования и возможность установки ПР непосредственно на ТОУ, на щите управления или на вторичном приборе.
Позиционный регулятор типа ПР1.5М1 формирует дискретный командный сигнал

где P1 - контрольный сигнал от датчика; P3 - задание АСР, Р3(20, 100) кПа.
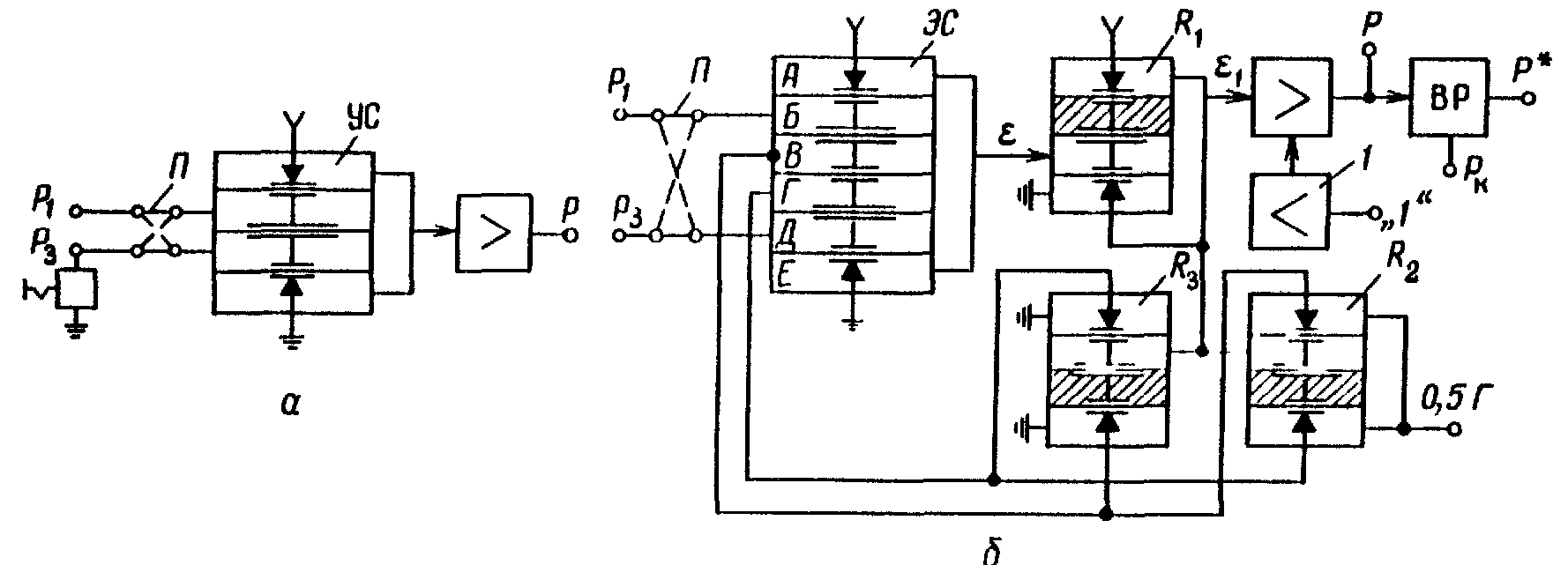
Рис. 7.18. Схема позиционных регуляторов:
а -типа ПР1.5; б–типа ПР1.6М1
В состав регулятора ПР 1.5 (рис. 7.18, a) входят задачик для выработки сигнала P3, переключатель П, усилители давления УС и мощности. Переключатель П позволяет изменять знак обратной связи АСР в зависимости от характеристик ИМ и РО (нормально открытый и нормально закрытый). В частности, при коммутации сигналов P1 и P3 в соответствии с пунктирными линиями Р = sign(P3P1).
Позиционный регулятор ПР1.6М1 реализует релейный закон

где С - смещение; Г - симметричная зона гистерезиса (возврата). Этот регулятор (рис. 7.18,б) содержит переключатель П для смены знака обратной связи в АСР; четырехвходовой элемент сравнения ЭС, в котором определяют знак сигнала =P1Р30,5Г; усилитель мощности; реле R1, реализующее функцию отрицания НЕ; выключающее реле ВР; усилитель расхода 1 для формирования дискретного сигнала ”1” и трехмембранные реле R2 и R3, обеспечивающие получение зоны гистерезиса ±0,5Г. В регуляторе используют задатчики (на рис. 7.18, б не показаны) для генерирования давлений P3, 0,5Г, "1" и малого подпора для реле R1, R2 и R3. Сигнал 0,5Г вводят в реле R2, и через одно из его сопел в камеру В или Г элемента сравнения ЭС, выход которого инвертируют в R1, усиливают по расходу и при Pк=0 подают через выключающее реле ВР на ИМ (при Pк=1 на выходе регулятора Р*=0 при любом Р). Одновременно сигнал , =0 или 1 переключает ПС реле R2, R3, что ведет к смене знака слагаемого 0,5Г в сумматоре ЭС.
Величину зоны гистерезиса Г настраивают с помощью независимого задатчика с учетом условия 20 кПаP3+0,5Г100 кПа.
Пропорциональный регулятор типа ПР2.8 предназначен для стабилизации с погрешностью регулируемой координаты P1 на уровне

Рис. 7.19. Схема П-регулятора типа ПР2.8
задания P3. В статических режимах сигнал на выходе регулятора
P=k(P1P3)+P0,
где k- коэффициент усиления, k=100/; - предел пропорциональности, %; P0-опорное давление, вводимое для смещения "нуля" регулятора при P1=P3. Статическая погрешность регулятора зависит от коэффициента усиления ТОУ k0 и амплитуды возмущения A:=k0A/(l+k0k).
Регулятор ПР2.8 (рис. 7.19) состоит из переключателя П, дроссельных сумматоров 1 и 2, элемента сравнения ЭС, усилителя мощности и выключающего реле ВР. Разность давлений P1P3 вводят через переключатель П в сумматор 1, состоящий из двух постоянных ПС с проводимостями a1 и a2 и регулируемого ПС с проводимостью b1. На выходе 1 имеем сигнал PБPВ=k1(P1P3), где k1=a1/(a1+2b1), k1(0,01; 0,99); PБ, PВ - давления в камерах Б и В элемента сравнения ЭС. Аналогично PГPД=k2(P0P), где k2=a2/(a2+2b2), k2(0,01; 0,99). Равновесный режим регулятора возможен при PБPВ+PГPД=0, откуда Р=(P1P3)k1/k2+Р0.
Для изменения параметра настройки =k2/k1 в регуляторе используют пневмосопротивления с проводимостями b1 и b2. При настройке от 100 до 3000% варьируют проводимостью b1 (при закрытом ПС с проводимостью b2 и k21). Для настройки от 2 до 100% изменяют проводимость b2 (дроссель b1 при этом закрывают полностью, так что k11 и k2). Выходной сигнал Р усиливают по мощности в точном повторителе типа П2П.7 и при Рк=0 через реле ВР передают на ИМ (при Рк=1 командный сигнал Р=0). Для формирования давлений Р3, Р0=0 используют дополнительные задатчики. Постоянный дроссель перед усилителем мощности служит для ослабления автоколебаний, возникающих в контуре "ЭС2”.
Динамические режимы работы регулятора ПР2.8 описывают в первом приближении передаточной функцией W(p)=Wп(p)/ где Wn(p)=(T2p+l)/[(T1p+l)(T3p+l)]. Постоянные времени T1, T2 зависят от коэффициентов усиления сумматоров 1, 2 и объема "паразитных" глухих камер ЭС. Постоянная T3 характеризует проводимость дросселя и объем глухой камеры усилителя мощности. Обычно T1, T2, T3 менее 0,10,20 с, поэтому при <0,15 рад/с функция Wп(p)1, и ПР2.8 рассматривают как П-регулятор.

Рис. 7.20. Схема ПИ-регулятора типа ПР3.31
Регулятор типа ПР3.31 предназначен для осуществления ПИ-закона
![]() ,
,
где - предел пропорциональности; Tи-время интегрирования (изодрома). Регулятор (рис. 7.20) условно разделяют на интегральный, пропорциональный и усилительный узлы. Интегральная составляющая ПИ-закона вырабатывается мембранным сумматором и глухой камерой V, охваченными положительной обратной связью ПОС, которая вводится в камеру Б сумматора. Входной сигнал P1P3=Р проходит через переключатель П, сумматор , выключающее реле ВР, и на выходе интегрального узла Ри(p)=P(p)/(Tиp), где Ти- постоянная времени глухой камеры.
Сигнал Pи через повторитель вводят в пропорциональный узел, образованный линейными дроссельными делителями 1, 2 и усилителем давления УС. Из условия равновесия сил на сумматоре УС определяется выходное давление
Р=(Р2-Ри)k1/k2+Pи ,
где kj=bj/(aj+bj), j=1,2; a1, a2, b1, b2 - проводимости ПС сумматоров 1, 2 . Сигнал
Р2(p)=Р(p)+Р(p)/(Tир),
поэтому
Р(p)=Р(p)k1/k2+Р(p)/(Tир),
и передаточная функция регулятора ПР3.31 принимает вид:
W(p)=Р(p)/Р(p)=k1/k2+1/(Tир)=1/+1/(Tир),
где =k2/k1. Настройку параметра в интервале от 2 до 100% осуществляют проводимостью b2 (при установке b1 на отметку 100% и k11). При b1=0 коэффициент k20, и предел пропорциональности 0. Если регулируемый дроссель открыт и b2>>а2, то k2=1, и 100%.
Настройку параметра в интервале 100-3000% осуществляют проводимостью b1 регулируемого ПС (при открытом дросселе с проводимостью b2). Время Tи изменяют независимо от регулируемым дросселем b3 глухой камеры в интервале 36000 с.
Узел усиления содержит точный мощный повторитель типа П2П.7, на входе которого установлен дроссель для демпфирования автоколебаний в усилителе расхода. Выключающие реле ВР1, ВР2 по команде Pк=1 отключают глухую камеру V и регулятор от ИМ. Одновременно с этим линия ИМ соединяется с камерами V и Б сумматора , что позволяет осуществлять "безударное" включение регулятора в работу при переводе с ручного режима на автоматический.
Динамику регулятора ПР3.31 характеризуют в малом передаточной функцией:
W(p)=[1/+1/(Tир)]Wп(p),
где Wn(p)=(1+C1p+C2p)/[(Tир+)(1+C3p+C4p2)], параметры С1С4 зависят от значений k1, k2 и . При 10<<3000% и <0,3 рад/с функция Wn(p) несущественно отличается от 1, и блок ПР3.31 рассматривают как ПИ-регулятор.
Пропорционально-интегральный регулятор типа ПР3.32 аналогичен регулятору ПР3.31 и отличается лишь наличием местного ручного задатчика для установки P3.
Регулятор соотношения типа ПРЗ.ЗЗ обеспечивает пропорциональную зависимость P1=C0P1' между сигналами P1 и P1' при ПИ-законе регулирования:
![]()
Регулятор ПРЗ.ЗЗ (рис. 7.21, a) состоит из узла соотношения и ПИ-регулятора типа ПР3.31, конструктивно оформленных как один прибор. Узел соотношения координат P1 и P1' построен на базе двух дроссельных делителей, каждый из которых имеет постоянные и регулируемые ПС с проводимостями a3, b3 и a4 , b4. Давление на выходе узла
PГPД=k1(P1'P0)k2(P1'P0),
где kj=aj/(aj+bj), j=3,4; P0- опорное давление от задатчика, P2=20 кПа. В статике PГPД=0, поэтому
k2/k1=(P1P0)/(P1'P0)=C0.
Настройку С0 осуществляют регулируемыми ПС с проводимостями b3 и b4. В частности, если b3=0, то k11, и изменяя проводимость b4 от 0 до 100%, можно устанавливать С0 в интервале от 0,1 до 1. Если b3=100% и k10,01, от вариации b4 изменяют C0 от 1 до 10.
Регулятор соотношения ПР3.34 позволяет корректировать параметр С0 в зависимости от третьего сигнала P4(t). Этот регулятор отличается от прибора ПРЗ.ЗЗ только узлом соотношения, схема которого приведена на рис. 7.21,b. В узел соотношения введен повторитель давления P4 с двумя переменными ПС, выполняющими роль дросселя b4. Узел соотношения в общем случае нелинеен, поэтому при его индивидуальной настройке и линеаризации в малом отношения P4/P1' или P4/P1 используют дроссели b5, b6 опорное давление Р0.

Рис. 7.22. Схема регуляторов соотношения:
а –типа ПРЗ.ЗЗ; б –типа ПР3.34
Пропорционалъно-интегрально-дифференциальный регулятор ПР3.35 реализует закон
![]() ,
,
где Tп - время предварения.
Регулятор ПР3.35 (рис. 7.22) содержит блоки предварения Д, пропорциональный П и интегральный И.
Блок Д представляет собой устройство прямого предварения типа ПФ2.1 (без оконечного усилителя мощности). Его выходной сигнал Pj -"Pl+TnPi вводят в пропорциональный блок П, представляющий регулятор типа ПР2.8. Интегральный узел И построен в основном аналогично интегральному блоку регулятора ПР3.31 (элементы П, ЭС, ВК, V и ПОС на рис. 7.20), однако его дроссельный делитель с ПС b1, a1 перенесен в регуляторе ПР3.35 в блок П.
В блоке П суммируют сигналы P1/, Р3/ и p(P1Р3)dt/Tи, образуя командное давление Р. Настройку регулятора ПР3.35 осуществляют с помощью регулируемого дросселя b1 (предел пропорциональности изменяется от 100 до 3000%), ПС b2 (параметр варьируется от 2 до 100%); дросселем b3 устанавливают время интегрирования Tи от 3 до 6000 с, а ПС b4 в устройстве предварения ПФ2.1 - время Тп от 3 до 600 с.
Каждый узел регулятора ПР3.35 имеет выключающее реле, что позволяет осуществлять его безударное включение при смене режима управления с ручного на автоматический. Регулятор имеет два переключателя, обеспечивающие возможность работы как с нормально открытыми, так и с нормально закрытыми ИМ и РО.

Рис. 7.22. Схема ПИД-регулятора типа ПР3.35
ПИД-закон реализуют также с помощью ПИ-регулятора ПР3.31 и устройства прямого предварения ПФ 2.1. При параллельном соединении ПР3.31 и ПФ2.1 используют дополнительный сумматор типа ПФ1.1, где из выходных сигналов регулятора и устройства предварения вычитают Р1 вследствие чего параметры настройки ПИД-регулятора оказываются независимыми друг от друга. При последовательном соединении ПФ2.1 и ПР3.31 (или ПР3.31 и ПФ2.1) параметр настройки Д-составляющей ПИД-регулятора зависит от предела пропорциональности .
Пневматические вторичные приборы. Эти приборы предназначены для показания и регистрации сигнала Р, а также сигнализации об его отклонениях за диапазон заданных изменений. Все вторичные приборы имеют одинаковую функциональную структуру измерительного узла: преобразователь сигнала Р в усилие (чаще всего сильфон); рычажный сумматор сил; преобразователь малых перемещений в давление воздуха Р0; исполнительный механизм (преобразователь давления Р0 в большие перемещения стрелки прибора); устройство отрицательной обратной связи (пружина). В зависимости от типа прибора в его состав дополнительно входит лентопротяжный механизм с редуктором и двигателем, станция управления режимами работы АСП, устройства сигнализации.
Вторичные приборы типа ПКП предназначены для показания с погрешностью ±0,5 или ±1,0% одного (ПКП.1) или двух (ПКП.2) сигналов. В соответствии с этим прибор имеет один или два однотипных измерительных узла (рис. 7.23, а) и две шкалы. Измеряемое давление Р1 вводят в сильфон С, усилие от которого передается на рычажный сумматор . При вариациях давления Р1 рычаг перемещается и изменяет расстояние до сопла (СП) и давление воздуха Р0, вводимого в камеру исполнительного механизма (ИМ), что приводит к перемещениям поршня (ПР) с мягкой уплотнительной манжетой (М). Поступательное движение поршня преобразуется во вращение вала, на шкиве (Ш) которого закреплен тросик (ТР), перемещающий каретку (К) со стрелкой относительно линейной (или квадратической) шкалы (ШК). Одновременно изменяется натяжение пружины обратной связи П0, что ведет к уравновешиванию моментов сил, действующих на рычаг . Для настройки нуля и диапазона шкалы прибора служат корректоры КР.

Рис. 7.23. Вторичные пневматические приборы:
а – измерительная схема прибора ПКП;
б – исполнительный механизм прибора ПВ
Модификации приборов ПКП.1П и ПКП.1Э обеспечивают кроме показания пневматическую и электрическую сигнализацию достижения давлением Р1 заданных значений Р, Р+.Для этого в приборе ПКП.1 устанавливают 2 фиксатора диапазона [Р, Р+], представляющие собой ПС типа «сопло-заслонка», и два пневмоклапана КЛАМП или дискретный пневмоэлектропреобразователь ППЭД.2 (либо не выпускаемый серийно П1ПР.4). При Р1=Р или Р+ каретка прибора открывает сопло фиксатора, и давление воздуха на входе клапана или преобразователя становится равным нулю, вследствие чего на выходе КЛАМП (или ППЭД.2) появляется усиленный пневматический (или электрический) командный сигнал.
Вторичные приборы типа ПВ функционально устроены аналогично приборам ПКП и отличаются от них только исполнительным механизмом (рис. 7.23,б). При изменении давления Р0 после сопла СП и в камере ИМ упругая чашечная мембрана (МБ) перемещает опору (ОП), которая поворачивает вспомогательный рычаг в около оси, что вызывает перемещение тросика ТР с закрепленной на нем кареткой со стрелкой и пером и пружины обратной связи.
Прибор ПВ.1 осуществляет показания одного сигнала Р1. Вторичный прибор ПВ3.2 контролирует сигнал Р1, задание Р3 и командное давление регулятора Р на трех независимых шкалах. Он снабжен станцией управления, позволяющей реализовать с помощью переключателя и двух кнопок режимы ручного дистанционного управления (регулятор отключен); автоматического регулирования (регулятор включен, Р3=const); автоматического программного регулирования (регулятор включен, Р3(t) вырабатывает программный задатчик).

Приборы контроля регулирующие типа ПКР.1, ПКР.2 позволяют показывать на одной или двух шкалах один или два сигнала и регистрировать с погрешностью ±0,5% на одной ленточной диаграмме один или два сигнала. Измерительный узел прибора аналогичен узлу ПКП, с той разницей, что на каретке К закреплено кроме стрелки перо с чернильным баллончиком. Приборы работают с линейными или квадратическими шкалами длиной 100 мм, диаграммная бумага движется со скоростью 20 мм/ч (по заказу 40, 60 или 1200 мм/ч). Для перемещения ее с погрешностью ±0,3% необходимы электродвигатель переменного тока, понижающий редуктор со сменными зубчатыми шестернями и лентопротяжный механизм.
Серийно выпускаемые пневматические приборы и регулирующие устройства приведены в табл. 7.2.