

7.2. Элементы и устройства пневматических средств автоматизации
Простые элементы ПСА. К простым элементам ПСА относят емкости, пневмосопротивления (ПС) или дроссели, пневмопроводы, мембраны, сильфоны, пружины, рычаги.
Пневмоемкости предназначены для накопления сжатого воздуха; основной характеристикой их служит постоянный или переменный объем V. Емкость с постоянным объемом показана на рис. 7.1, а, условное обозначение емкости в схемах ПСА изображено на рис. 7.1, б. В УСЭППА применяют емкости типа ПОЕ.50 с постоянным объемом V = (50±8) см3, в КЭМП- емкость типа ЕАМП с V=(25±4) см3.
Пневмосопротивления (ПС) применяют для создания местного сопротивления потоку воздуха и изменения его расхода G. Пневмосопротивления разделяют на постоянные, регулируемые вручную и переменные. В постоянных ПС типа жиклер, капилляр (рис. 7.2, а, б) площадь F проходного сечения неизменна. В регулируемых ПС типа конус - конус, цилиндр - цилиндр, шарик - цилиндр (рис. 7.2, в,г,д) и переменных дросселях типа сопло - заслонка (рис. 7.2, е) площадь F изменяет человек или какое-либо техническое устройство.
По режиму течения воздуха ПС делят на ламинарные (обычно капилляры), турбулентные (жиклеры) и смешанные. Статические характеристики пневмосопротивлений G = f(P1, Р2, F) обычно нелинейны, но при малом перепаде давления Р = Р1 – Р2 их можно линеаризовать в виде G=a(P1 – Р2), где а - коэффициент проводимости дросселя. Такая линеаризация справедлива для ламинарных ПС при Р<(20-30) кПа, для остальных - при Р<(10-20) кПа. Статическая характеристика дросселя типа сопло - заслонка линейна при перемещениях h< (0,06- 0,08) мм.
Наибольшее применение в ПСА получили постоянные ПС типа П2Д.4, САМП-4 с отношениями диаметров d к длинам капилляра L, равными 0,18/20; 0,3/20; 0,18/7; 0,5/20, и САМП-4 с отношениями d/L =0,18/40; 0,4/20. В состав УСЭППА входят регулируемые дроссели конус- конус и цилиндр- цилиндр типов П2П.2М, П2П.1М. Их аналогами в КЭМП являются САМП-1,2,3.
Пневмопроводы служат для передачи импульса давления (реже -расхода) на расстояния до 250 - 300 м. Их изготовляют из пластмассовых (металлических) трубок внутренним диаметром d = 4-8 мм. Динамику безрасходного пневмопровода длиной L приближенно описывают передаточной функцией
W(p) = exp{p}/(T1p+l),
где время запаздывания =(2-3)L/v0; v0 - скорость звука в воздухе; постоянная времени T1 = 115 с.
Мембраны применяют для преобразования давления р или перепада Р в перемещение h или в силу Ф. Наиболее часто используют "вялые" плоские или гофрированные мембраны из тонкой прорезиненной ткани с малой собственной упругостью. Такие мембраны имеют жесткие центры диаметром d и при малых h рассматриваются как усилительные звенья с передаточной функцией
W(p)=Ф(p)/P(p)=Fэ ,
где эффективная площадь Fэ=(dм2+dц2+dмdц)/12; dм – диаметр заделки мембраны.

Рис. 7.1. Схемы емкостей:
а–постоянного объема; б–условное обозначение емкости

Рис. 7.2. Схемы пневматических сопротивлений:
а – жиклер; б – капилляр; в – конус – конус; г – цилиндр – цилиндр;
д – шарик – цилиндр; е – сопло – заслонка
Сильфоны предназначены для преобразования перепада Р в перемещение h или силу Ф. Тонкостенные гофрированные сильфоны со значительным коэффициентом собственной жесткости kс при Р<200 кПа в области низких частот рассматривают как линейные усилительные звенья с передаточной функцией
W(p)=Ф(p)/P(p)=Fэ/kс,
где эффективная площадь Fэ(dн+dв)3/16; dн и dв - наружный и внутренний диаметры сильфона.
Пружины используют в пневматических устройствах для преобразования силы Ф в перемещения h. В области низких частот цилиндрические пружины с коэффициентом жесткости kп характеризуют как усилительные звенья с
W(p)=h(p)/Ф(p)=1/kп.
Механические рычаги применяют в ПСА для суммирования перемещений и сил. Рычажный сумматор малых перемещений х1, х2 имеет две оси вращения, сумматор сил конструируют на одноосном рычаге, снабженном уравновешивающей пружиной.
Сложные элементы ПСА. К ним относят пневматические камеры, дроссельные делители, преобразователи перемещений и сил в давление, усилители давления и мощности, сумматоры и реле.
Пневмокамеры служат для аккумуляции сжатого воздуха и изменения его давления во времени по определенному закону. Камера состоит из емкости объемом у и нескольких ПС на вводах. Различают глухие камеры с одним вводом (рис. 7.3,а) и проточные камеры, у которых два и более ввода (рис. 7.3, б). Статику проточной камеры при перепадах давления менее 10-20 кПа описывают линейным уравнением
РkjPj, j=1, 2,
где kj=aj/(a1+a2), aj - проводимость дросселя.

Рис. 7.3. Схемы камер:
а – глухой; б – проточной; в – дроссельного делителя

Рис. 7.4. Схема преобразователя перемещения в давление
Динамику проточной камеры в малом характеризуют передаточной функцией
W(p)=P(p)/Pj(p)=kj/(Tp+1), j=1, 2,
где T=V/[R(a1+a2)]; R - газовая постоянная; - абсолютная температура.
Для глухой камеры k1 = 1, k2 = 0. Тогда
P=k1P1+k2P2=P1; T=V/Ra1).
В серийных мембранных элементах ПСА образуются глухие "паразитные" камеры малого объема: V = 1,53 или 2,53 см3. При использовании капиллярных ПС постоянные времени таких камер не превышают 0,2- 0,3 с, что позволяет рассматривать их как усилительные звенья. При V=40 или 50 см3 величина T6-7 с.
Дроссельные делители предназначены для суммирования давлений P1, P2, ..., Pm с весами k1, k2, ..., km. Делители строят на базе проточных камер малого объема с ламинарными ПС проводимостью aj (j= 1, 2,..., m). Суммарное давление в камере делителя
РkjPj, j=1, 2,…, m
где kj=aj/(a1+a2+…+am).
Статическая погрешность делителя при близких Рj не превышает 2-4% и зависит от способа измерения Р. В динамическом отношении делители рассматривают как усилительные звенья в области частот [0, 0,7] рад/с. В ПСА чаще всего используют делители с m=2 и V=0; схема этого элемента показана на рис. 7.3, в.
Преобразователь перемещения в давление применяют в приборах ПСА для трансформации малых перемещений h заслонки (мембраны) чувствительного элемента в большие изменения давления Р. Такие преобразователи строят на переменных ПС типа сопло - заслонка, охваченных отрицательной обратной связью (рис. 7.4). Преобразователь состоит из двух ПС (постоянного и сопло- заслонка), механического сумматора перемещений и сильфона обратной связи (ОС). При перемещении верхней оси сумматора на расстояние х1 он перейдет из положения I в положение II. При этом возрастет давление Р, и сильфон ОС переместит нижнюю ось на расстояние х2, а сам сумматор займет равновесное положение III. При малых h (h0,08 мм) статическая характеристика преобразователя имеет вид P kcbx1/(aFэ), где b, а -плечи сумматора. Коэффициент усиления преобразователя kп 103 кПа/мм и в общем случае зависит от перепада давления Р0P.
Преобразователи силы в давления конструируют на базе рассмотренного преобразователя перемещения в давление.
Усилители давления предназначены для усиления алгебраической суммы одного, двух или четырех давлений.
Одновходовые усилители строят на базе переменного ПС типа сопло - заслонка и стабилизатора перепада давления Р0P (рис. 7.5, а). В таком усилителе заслонку, закрепленную на жестком центре мембраны М, перемещает сила FэР1. При изменении давления Р мембрана обратной связи М0 передвигает шарик Ш переменного ПС до восстановления баланса сил PF0Ф=P0F0, где F0 - эффективная площадь мембраны М0; Ф - усилие пружины (на рис. 7.5, а использовано условное обозначение питания). Статическая характеристика усилителя линейна при малых перемещениях сопла, коэффициент усиления не зависит от перепада Р0Р и достигает значения 1,5 -103 кПа/мм. Усилитель применяют в приборных конструкциях ПСА.
Двух- и четырехвходовые усилители конструируют на основе двух последовательно включенных переменных ПС типа сопло-заслонка и мембранного сумматора сил, формируемых давлениями Р1, Р2 или Р1Р4 (рис. 7.5, б, в). Возникающий разбаланс сил на сумматоре компенсируется за счет собственной жесткости "вялых" мембран. Обычно эта жесткость невелика, и зона линейности статической характеристики
Р=f(Р), Р=Р1Р2 или Р=Р1+Р3Р2Р4,
также очень мала и не превышает 200 Па для двухвходового и 400 Па - для четырехвходового усилителя (коэффициенты усиления равны 600 - 700 и 300 - 400 Па/Па соответственно). Статическая характеристика усилителей имеет малое начальное смещение |C 200 Па и небольшую зону гистерезиса.
Усилители давления УСЭППА называют элементами сравнения. Трехмембранный элемент П2ЭС.1 (рис. 7.5, б) сравнивает два давления Р1 и Р2 и в зависимости от знака их разности формирует на выходе сигнал "0" или "1" (в системе КЭМП аналогичный элемент назван компаратором КАМП). В пятимембранном элементе П2ЭС.З сравнивают три давления (на рис. 7.5, в камера Д соединена с атмосферой); выходной сигнал вне зоны линейности равен нулю или единице.
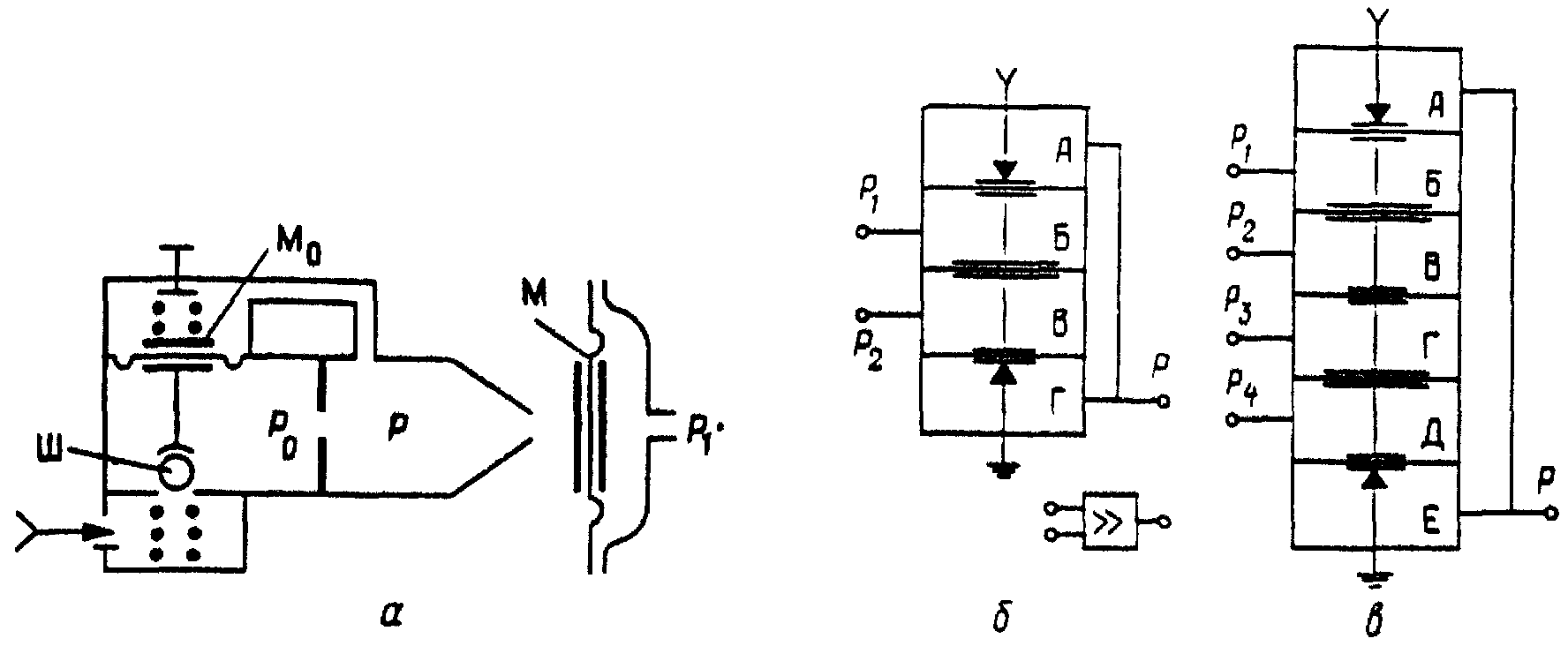
Рис. 7.5. Схемы усилителей давления:
а –одновходового; б– двухвходового; в –четырехвходового
Элементы сравнения используют для построения сумматоров двух, трех или четырех давлений. Для этого в камеру Д четырехвходового усилителя (рис. 7.5, в) вводят сигнал отрицательной обратной связи из камеры Е. В этом случае равновесие мембранного сумматора сил возможно на линейном участке статической характеристики при Р=Р1Р2+Р3. На этом усилителе можно выполнять разные операции: при Р1=РБ+РГ имеем Р=2Р1Р2; при Р3=РГ=0 получим Р=Р1Р2; при Р2=РВ=0 имеем Р=Р1+Р3; при РВ=РД=Р получим Р=(Р1+Р3)/2. В динамическом отношении сумматоры представляют усилительный элемент при частотах до 10-20 рад/с; основная погрешность сумматора на базе П2ЭС.З не выше 0,5%.
В состав КЭМП входит сильфонный сумматор трех давлений типа СМАМП, основная погрешность суммирования - 0,5%.
Усилители мощности предназначены для увеличения расхода воздуха без существенного изменения его давления. Такие усилители называют пневмоповторителями и применяют для разделения пневматических устройств на независимые по расходу части. Различают точные (маломощные) и грубые (мощные) повторители, имеющие разные классы точности и расходы воздуха.
Точный повторитель строят на одновходовом усилителе, состоящем из мембранного сумматора сил и двух ПС (рис. 7.6, а). Такой повторитель типа П2П.1 обладает погрешностью 0,25%; в полосе частот от 0 до 5 рад/с его рассматривают как усилительное звено.
Точный повторитель со сдвигом отличается от усилителя П2П.1 наличием двух пружин; усилие одной из них устанавливают регулировочным винтом. Такой повторитель типа П2П.2 реализует с погрешностью 0,25% зависимость Р=Р1±Р, где Р15 кПа.

Рис. 7.6. Схемы пневмоповторителей:
а - точного маломощного типа П2П.1; б – грубого мощного типа П2П.3;
в – точного мощного типа П2П.7
Грубый повторитель (рис. 7.6,б) состоит из двухмембранного сумматора и двух последовательно включенных переменных ПС (клапанов) К1 и К2 с большими проходными сечениями. Такой повторитель типа П2П.З воспроизводит входное давление Р1 с погрешностью 3% и имеет расход воздуха до 400- 450 л/ч. Повторители П2П.3 устанавливают на выходе пневматических приборов и регуляторов.
Мощный повторитель давления типа П2П.7 конструктивно оформлен как единый элемент, но фактически состоит из усилителя давления (камеры А, Б, В на рис. 7.6,в), грубого усилителя мощности (камеры Г, Д, Е) и канала отрицательной обратной связи по давлению. Повторитель имеет класс точности 0,5 и применяется в выходных каналах устройств ПСА.
В КЭМП входят точные маломощные повторители без сдвига ПАМП-1 (класс точности 0,25) и со сдвигом ПАМП-2 (класс точности 0,5), а также мощный усилитель ПАМП-3 (класс точности 0,5, расход воздуха 1500 л/ч).
Релейные элементы ПСА используют для реализации зависимости Р=signР (где Р=Р1Р2; Р1, Р2 входные сигналы). Реле строят на базе двухвходовых усилителей давления с положительной обратной связью и регулируемым смещением С статических, характеристик. Для создания смещения в одну из камер усилителя вводят малое или большое давление подпора, равное 30-40 или 70-80% от давления питания Рп (на схемах ПСА камера малого подпора имеет одинарную штриховку, большого - двойную).
На рис. 7.7,а показаны схема и статическая характеристика реле с малым смещением С 0 и большой зоной гистерезиса Г, возникающей из-за действия обратной связи по давлению. На рис. 1.1,б приведена схема реле с большим смещением с и зоной гистерезиса.
В УСЭППА входят трехмембранные реле типа П1Р.1 (см. рис. 7.7,б), П1Р.3 (см. рис. 7.7, а) и РУП-1М. В составе КЭМП специальных релейных элементов нет, их функции выполняют клапаны.
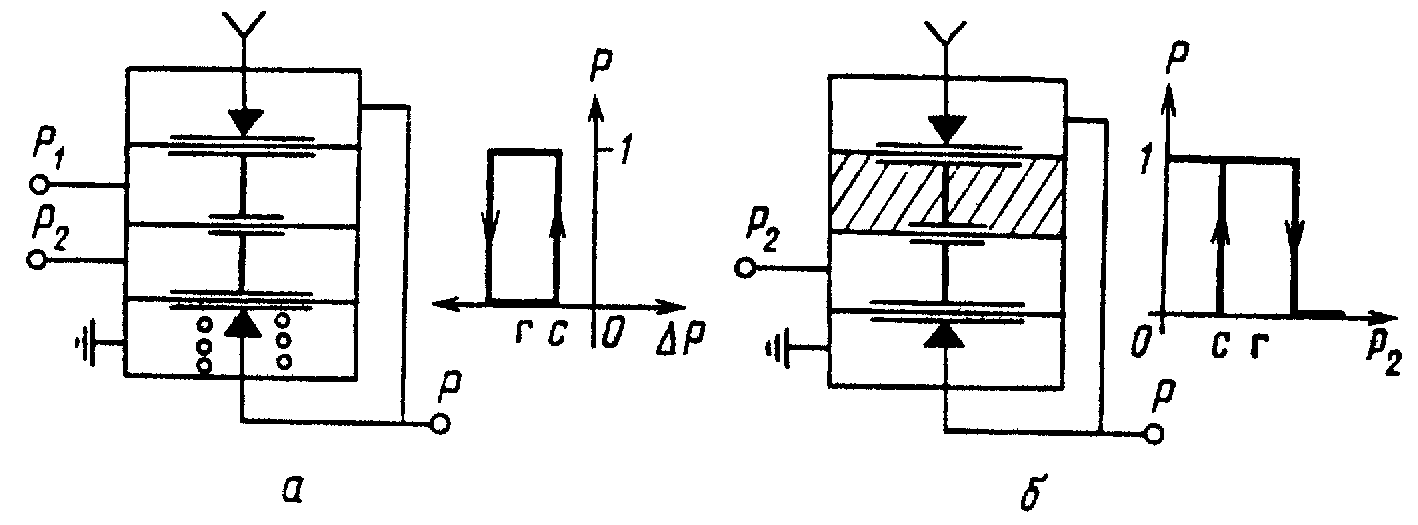
Рис. 7.7. Схемы и статические характеристики реле:
а – без смещения; б–со смещением
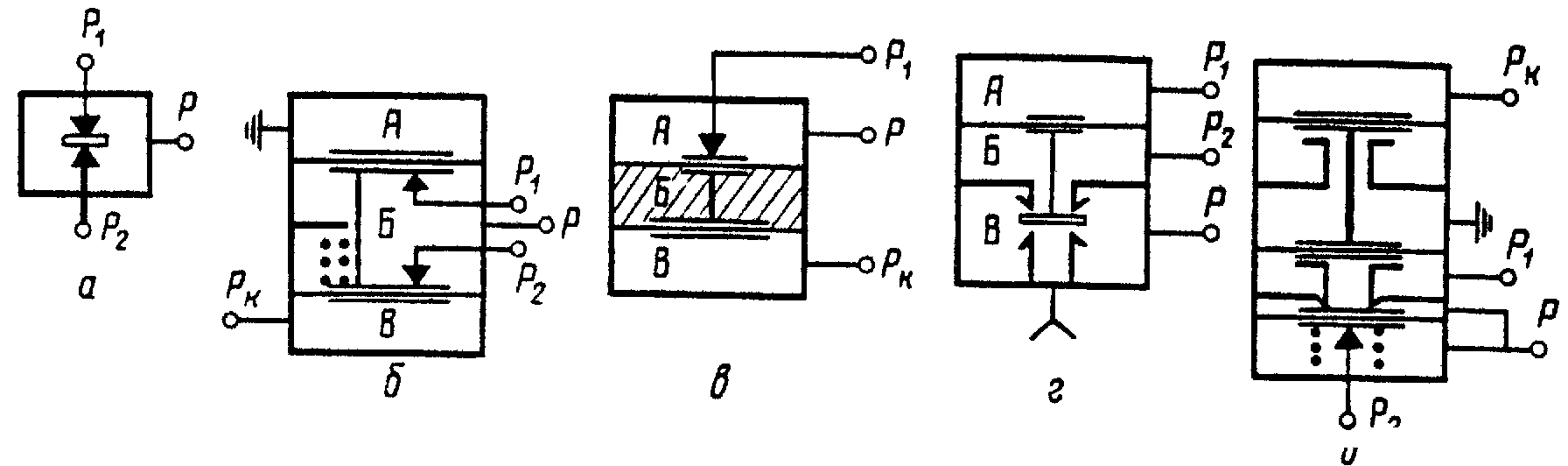
Рис. 7.8. Схемы клапанов:
а–безмембранный типа ПЗК.5; б–выключающее реле П-1108;
е–одноконтактаый клапан ПЗК.1; г – модуль интегральный П1МИ;
д – клапан КЛАМП
Для коммутации пневматических сигналов и реализации простейших логических операций в ПСА применяют выключающие реле и клапаны. Так, клапан ПЗК.5 реализует функцию дизъюнкции двух переменных Р1 и Р2 (рис. 7.8, а). Реле выключающее П-1108 (рис. 7.8, б) по командам сигнала Рк=1 или 0 коммутирует давления Р1, Р2 и выполняет логическую функцию конъюнкции. В одноконтактном клапане ПЗК.1 (рис. 7.8, в) применяют подпорное давление, создаваемое в камере Б (или В) и командный сигнал Рк, вводимый в камеру В (или Б). При Рк=1 сигнал P1 не проходит на выход; если Рк=0, то Р=Р1. Обратный клапан ПЗОК.1 предназначен для пропускания сигналов только в одном направлении. Модуль интегральный П1МИ, входящий в КЭМП, реализует функции отрицания, запрета и импликации (рис. 7.8, г). Функциональным эквивалентом реле П-1108 в КЭМП служит клапан КЛАМП (рис. 7.8, д).
Для формирования пневмосигналов определенного уровня в ПСА используют задатчики. Их строят на базе дроссельных делителей (см. рис. 7.3,в), один из вводов которого соединен с источником питания, а другой - с атмосферой; точного маломощного повторителя со сдвигом (рис. 7.9, а) и проточной камеры с регулируемым ПС типа шарик-цилиндр (рис. 7.9, б). В УСЭППА входят задатчик П23Д.3 (рис. 7.9, б), устанавливаемый перед глухими камерами, и мощный задатчик П23Д.4 с дополнительным усилителем мощности. В КЭМП имеется маломощный задатчик ЗАМП-1.

Рис. 7.9. Схемы задатчиков:
а – маломощного; б – типа П23Д.3

Рис. 7.10. Схема пневмокнопки
Дискретные сигналы в ПСА формируют с помощью пневмокнопок и тумблеров. Эти элементы конструируют на базе регулируемых ПС типа сопло-заслонка или шарик-цилиндр. Схема пневмокнопки П1КН.З показана на рис. 7.10. При нажатии на кнопку 1 шток 2 открывает заслонку 3 и давление Рп проходит на выход. В пневмотумблере П1Т.2 перемещение штока осуществляет рычаг, фиксирующий "открытие" или "закрытие" тумблера. Пневмокнопки используют и как конечные выключатели (элемент П1ВК.1).
Устройства ПСА. К устройствам, состоящим из нескольких элементов, условно относят мощные повторители, интеграторы, умножители, дифференциаторы, сумматоры, селекторы, квадраторы и т.п. Некоторые из этих устройств конструктивно оформлены как единое изделие (например, сумматоры, дифференциаторы и т.д.), другие устройства (интеграторы, генераторы и т.п.) используют только как составные части приборов и регуляторов.
Точные мощные повторители строят на базе повторителя типа П2П.7 и оформляют как самостоятельное изделие, либо конструируют на основе двухвходового усилителя давления и грубого повторителя, охваченных отрицательной обратной связью ОС (рис.7.11, а). Такой повторитель ПП1.5 имеет класс точности 0,5 и обеспечивает расход воздуха 180- 200 л/ч.
Устройство алгебраического суммирования типа ПФ1.1М1 реализует с погрешностью 1% зависимость Р=Р1Р2+Р3Н1+Н2, Р1Р3-входные сигналы, Н1,Н2, - опорные давления из интервала (20-100) кПа. В состав устройства (рис. 7.11, б) входят семимембранный элемент сравнения, усилитель мощности, два задатчика и линия обратной связи ОС.
Умножители сигнала на константу k с погрешностью 0,5% выполняют операцию P=k(P1H)+H, где k(0,2, 1) или k[l, ], H=20 кПа. Устройство умножения ПФ1.3.9 (рис. 7.12) состоит из задатчика для получения сигнала H, дроссельного сумматора, двухвходового усилителя УС, охваченного отрицательной обратной связью ОС, и усилителя мощности типа П2П.7. Переключатели П1, П2 служат для установки диапазона изменения k (для k< 1 коммутация сигналов показана на рис. 7.12 сплошными линиями).
Простейший интегратор реализуют с помощью глухой камеры с постоянной времени Т и ламинарным ПС. Он не имеет обратной связи и обеспечивает приемлемую точность только при малых (по сравнению с Т) значениях времени интегрирования.

Рис. 7.11. Схемы пневматических устройств:
в –точного мощного повторителя; б–мембранного сумматора
Чаще всего интеграторы строят на базе мембранного сумматора и глухой камеры объема V, охваченных положительной обратной связью (рис. 7.13, а). Динамика интегратора характеризуется передаточной функцией
W(p)=Р(p)/Р(p)=1/(Tp),
где Р=P1P2; T=V/(Rb); b-проводимость ПС. Погрешность данного интегратора составляет 2-3%. Для уменьшения погрешности интегрирования применяют несколько повторителей и камер.
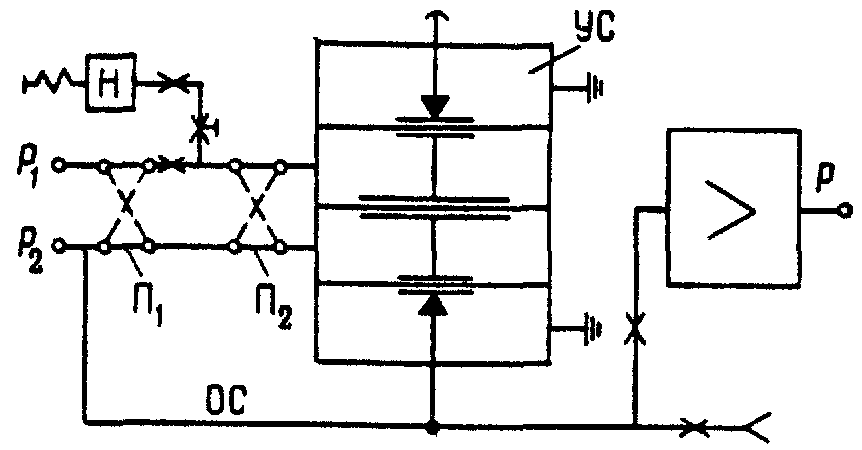
Рис. 7.12. Схема устройства умножения на константу
Устройства дифференцирования строят на основе трехмембранного усилителя УС, охваченного отрицательной обратной связью ОС с глухой камерой (рис. 7.13, б). Если коэффициент усиления УС k>>1 и "паразитные" емкости малы, то динамику рассматриваемого идеализированного устройства предварения описывают передаточной функцией
W(p)=P2(p)/P1(p)=Tпр+1.
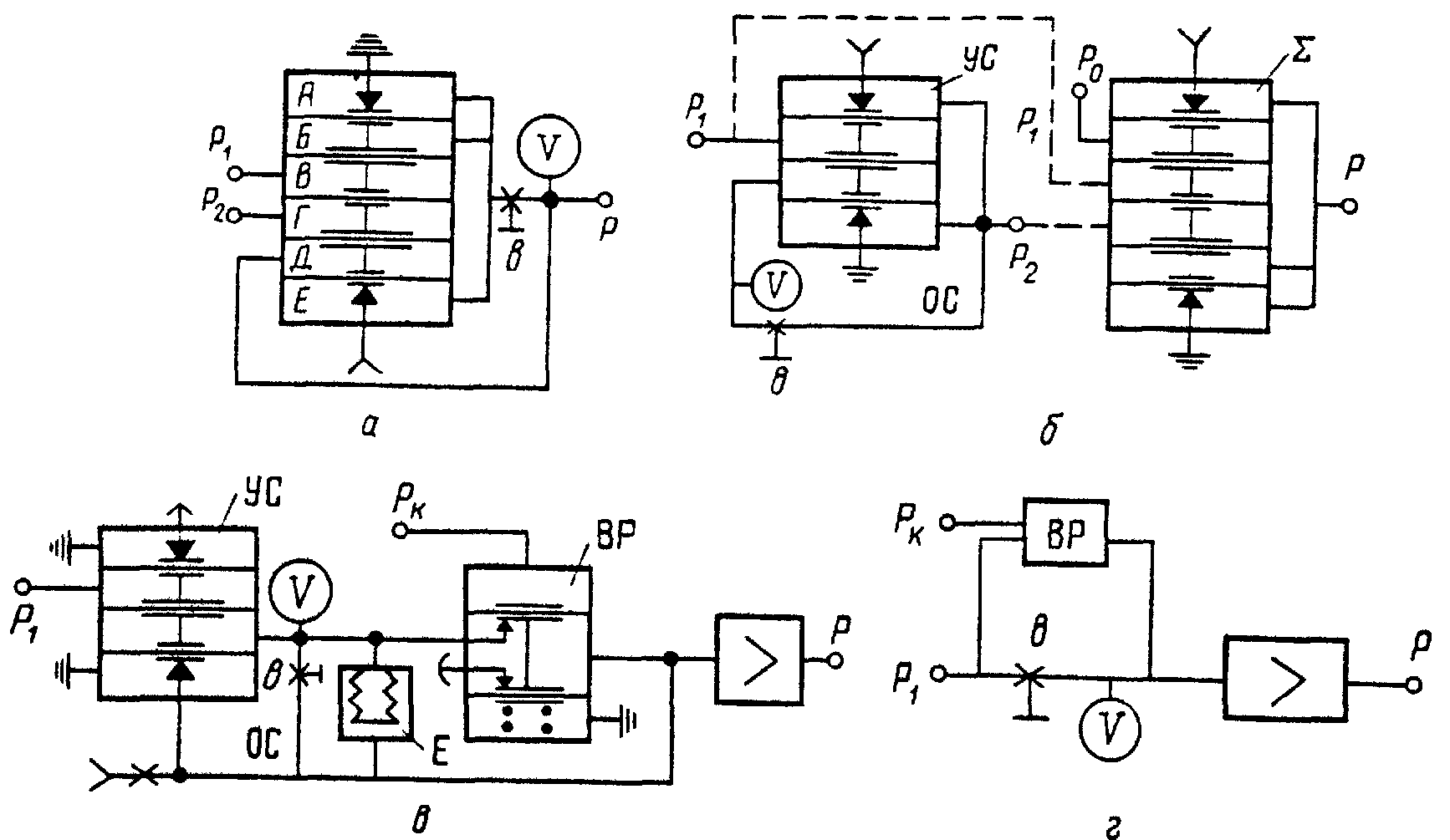
Рис. 7.13. Схемы пневматических устройств:
а – интегратора; б – дифференциатора; в – прямого предварения;
г – обратного предварения
Для преобразования его в идеальный дифференциатор с передаточной функцией
W(p)=P(p)/P1(p)=Tпp
следует ввести дополнительный сумматор , в котором из давления Р2 необходимо вычесть P1 (на рис. 7.13, б дополнительные коммуникации показаны пунктиром). Для обеспечения условной знакопеременности P(t) в сумматор вводят опорное давление Р0.
Серийное устройство прямого предварения типа ПФ2.1 (рис. 7.13, в) снабжено выключающим реле ВР (позволяющим при Рк=0 блокировать действие дифференциатора) и точным мощным повторителем П2П.7. Для ослабления автоколебаний, возникающих в контуре "УС-ОС", в устройстве используют емкость Е с сильфоном. Динамику ПФ2.1 описывают передаточной функцией
W(р)(Tпp+1)/(qTпр+l),
где Тп варьируют от 3 до 6000 с с помощью дросселя "в"; q=0,133. Область нормальной работы устройства составляет [0,012/Тп] рад.
Устройство обратного предварения типа ПФ 3.1 (рис. 7.13, г) реализует теоретический закон P(t)=P1(t)-TпP(t), где параметр Тп варьируют от 3 до 6000 с регулируемым дросселем "в".
Селекторы в ПСА служат для выбора наибольшего (наименьшего) сигнала из двух сравниваемых Р1 и Р2. Селектор типа ПФ 4/5.1 (рис. 7.14) состоит из усилителя давления УС, выключающего реле ВК, усилителя мощности П2П.7 и переключателя П1 Если Р1>Р2, то Рк=0, и сигнал Р1 поступает через ВК и усилитель на выход. Для настройки селектора на выбор меньшего давления в переключателе П1 каналы коммутируют в соответствии с пунктирными линиями.
Устройство ограничения сигналов типа ПП11.1 служит для ограничения сверху (снизу) входного давления Р1; конструктивно это устройство аналогично селектору ПФ 4/5.1, однако вместо сигнала Р2 вводят постоянное давление Н от задатчика. Тогда ПП11.1 реализует операцию: Р=Р1 при Р1<Н и Р=Н при Р1Н.

Рис. 7.14. Схема селектора:
УС – элемент сравнения; ВК – выключающее реле; 3 – усилитель мощности; П1 – переключатель

Рис. 7.15. Схема квадратора
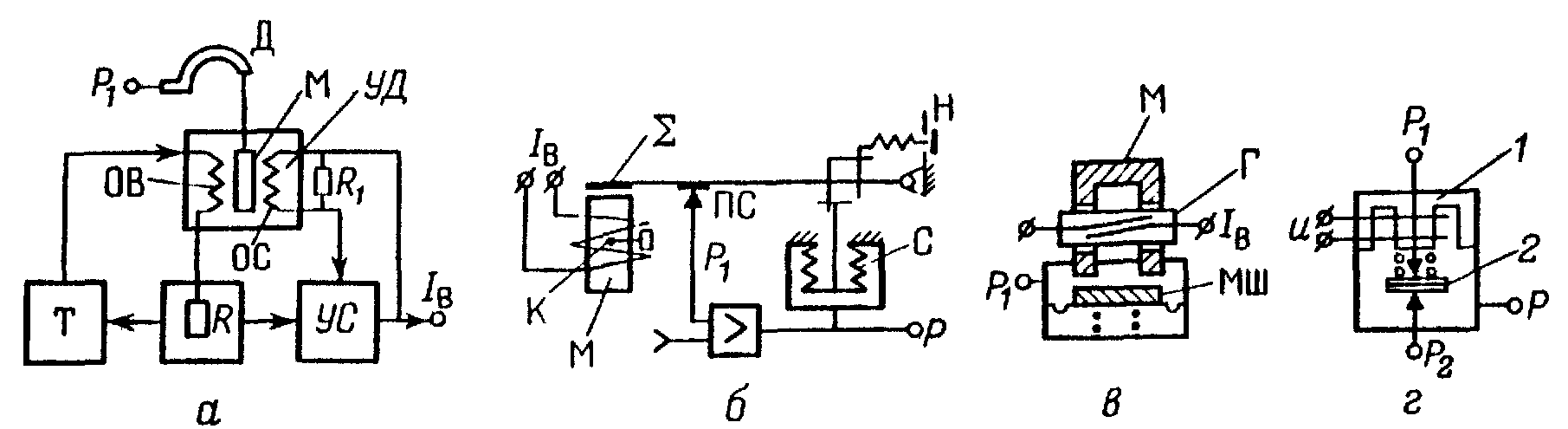
Рис. 7.16. Схемы устройства преобразования рода сигнала:
а–пневмоэлектрический преобразователь ППЭ-2;
б – электропневматический преобразователь ЭП-0000;
в – герконовый преобразователь типа ППЭД.1;
г – преобразователь типа П1ПР.5
Устройство извлечения квадратного корня (квадратор) типа ПФ1.17 предназначен для реализации с погрешностью 1% функции Р= [80(Р1Н)]0,5+Н. Для аппроксимации параболы используют три кусочно-линейных функции, характеризуемых начальными значениями и углом наклона. Интервал определения каждой функции задают повторителями со сдвигами, углы наклона - регулируемыми ПС с проводимостями b1, b2 (рис. 7.15). Повторитель 1 устанавливает первый интервал при Р[30, 45] кПа и угле наклона прямой, равном 45°; повторитель 2 определяет второй интервал при Р[40, 75] кПа и угле наклона, зависящем от проводимостей a1, b1. Третий интервал при Р[70,100] кПа задают повторителем 3, а угол наклона - проводимостями a2, b2. Усиление выходного сигнала осуществляют в точном мощном усилителе.
Преобразователи пневмоэлектрические и электропневматические предназначены для преобразования рода энергии непрерывных сигналов.
Преобразователь
типа ППЭ-2 преобразует с погрешностью
1% пневматический сигнал в сигнал
постоянного тока 0-5, 0-20 или 4-20 мА (при
нагрузке на выходе не более 2,5 кОм).
Принципиальная схема устройства
приведена на рис. 7.16, а.
Пневмосигнал Р1
поступает в манометрическую


трубку (Д), которая перемещает постоянный магнит (М) в управляемом дросселе (УД) с обмотками возбуждения (ОВ) и обратной связи (ОС). Электрический сигнал, пропорциональный Р1, выделяется на сопротивлении R, включенном через триггер Шмидта Т в обмотку 0В. Сигнал от резистора R поступает на усилитель (УС) и далее на выход преобразователя. Часть тока Iв вводят в обмотку ОС дросселя. В контуре «триггер Т - обмотка OB - сопротивление R» возникают автоколебания тока, среднее значение и знак которого пропорциональны величине и направлению перемещения магнита М и выходному току Iв. Параметрами настройки преобразователя служат сменное сопротивление r1 и корректор нуля в УС.
Преобразователь ЭП-0000 преобразует электрические сигналы 0-5, 0-20 или 4-20 мА в давление воздуха 20-100 кПа. Принципиальная схема преобразователя приведена на рис. 7.16, б. Входной сигнал Iв вводят в катушку (К), в которой расположен постоянный магнит М, притягивающий с определенной силой, пропорциональной Iв, рычаг . Это ведет к изменению расстояния между соплом и заслонкой в ПС и давлений на входе Р1 и выходе Р усилителя мощности. Одновременно изменяется давление в сильфоне С, включенном в контур отрицательной обратной связи, что приводит к восстановлению равновесия рычажного сумматора . Настройку преобразователя производят винтом Н, изменяющим расстояние от оси сильфона до оси вращения , а также шунтом постоянного магнита. Серийно выпускают 4 модификации ЭП-0000 в разных исполнениях: обыкновенном, защищенном от пыли (влаги) и агрессивной среды, электробезопасном.
Для преобразования рода энергии дискретных сигналов применяют пневмоэлектрические преобразователи типов ППЭД-1, ППЭД-2 (сконструированные на базе одномембранных элементов микропереключателей и магнитоуправляемых герметичных контактов - герконов) и электропневматические преобразователи П1ПР.5 и ПЭПД (построенные на основе переменного ПС сопло - заслонка 2 и электромагнита 1). Выходами (входами) этих преобразователей служат сигналы уровня 0 или 24 В постоянного тока. Схемы преобразователей ППЭД.1 и П1ПР.5 приведены на рис. 7.16, в, г.
Основные серийно выпускаемые элементы и функционально простые устройства ПСА приведены в табл. 7.1.