

Дрогобицький державний педагогічний університет імені Івана Франка
Кафедра машинознавства та охорони праці
Лабораторія теорії машин і механізмів
“ “ 200_
Група Дата виконання роботи
Прізвище та ініціали студента
Лабораторна робота № 4
Визначення зведеного моменту тертя в круговій парі
Мета роботи: визначення зведеного коефіцієнта тертя ковзання на установці ТММ 7М і встановлення залежності приведеного коефіцієнта тертя ковзання від температури масла.
Обладнання: установка ТММ 7М, секундомір, міліметровий папір, масштабна лінійка, олівець.
Результати обчислень
Таблиця з результатами досліджень.
|
Швидкість обертання ротора n (об/хв) |
900 |
800 |
.... |
0 | |
|
Момент часу t (с) |
1 |
|
|
|
|
|
2 |
|
|
|
| |
|
3 |
|
|
|
| |
За отриманими даними подувати графік зміни швидкості обертання як функції від часу.
Висновок
|
підпис студента |
Робота захищена з оцінкою __________________________ підпис викладача |
Лабораторна робота № 5 зрівноважування обертових мас
Мета роботи: вивчити практичні прийоми зрівноважування обертових ланок та зрівноважити ротор, розміщення і величини не зрівноважених мас якого відомі.
Обладнання: установка ТММ25А, штангенциркуль.
Теоретичні відомості
Робота виконується на установці ТММ25М (рис. 1) настільного типу. яка складається з таких основних вузлів: ротора, фрикційного приводу і плити з стояками.
Ротором є вал 2, на якому вільно надіті п’ять алюмінієвих дисків 3 на відстані 80 мм один від одного. Переміщення дисків в осьовому напрямку обмежується лімбами 4, жорстко, закріпленими на валі. Лімби градуйовані по колу через два градуси, маточина кожного диска має риску, що дає змогу встановлювати диск на потрібний кут. Диски фіксуються гвинтами 1 і мають два наскрізних пази: один для кріплення вантажу, другий - для противаги. Пази розташовані під кутом 180. Поряд з пазом на диску прикріплено шкалу, що дає можливість встановлювати вантаж на погрібній відстані від осі обертання вала ротора. Установлено ротор на двох стояках.
Лівий кінець вала спирається на сферичний кульковий підшипник, що, крім обертального руху вала, дозволяє переміщення його в горизонтальній площині. Правий кінець вала встановлено на радіальному кульковому підшипнику, вмонтованому в каретці 8. Каретка може переміщатися на роликах 7 по напрямній 6 у горизонтальній площині і утримуватися в центральному положенні пружинами розтягування 5, що регулюються гвинтами. Обертається ротор від електродвигуна 11 за допомогою фрикційної передачі. Електродвигун змонтовано біля лівого стояка на натискному важелі 10. Під важелем є пускова кнопка подвійної дії. Натисканням важеля вниз фрикційний диск притискується до шківа 9 і вмикається електродвигун, що розганяє ротор.
|
|
|
Рис. 1. |
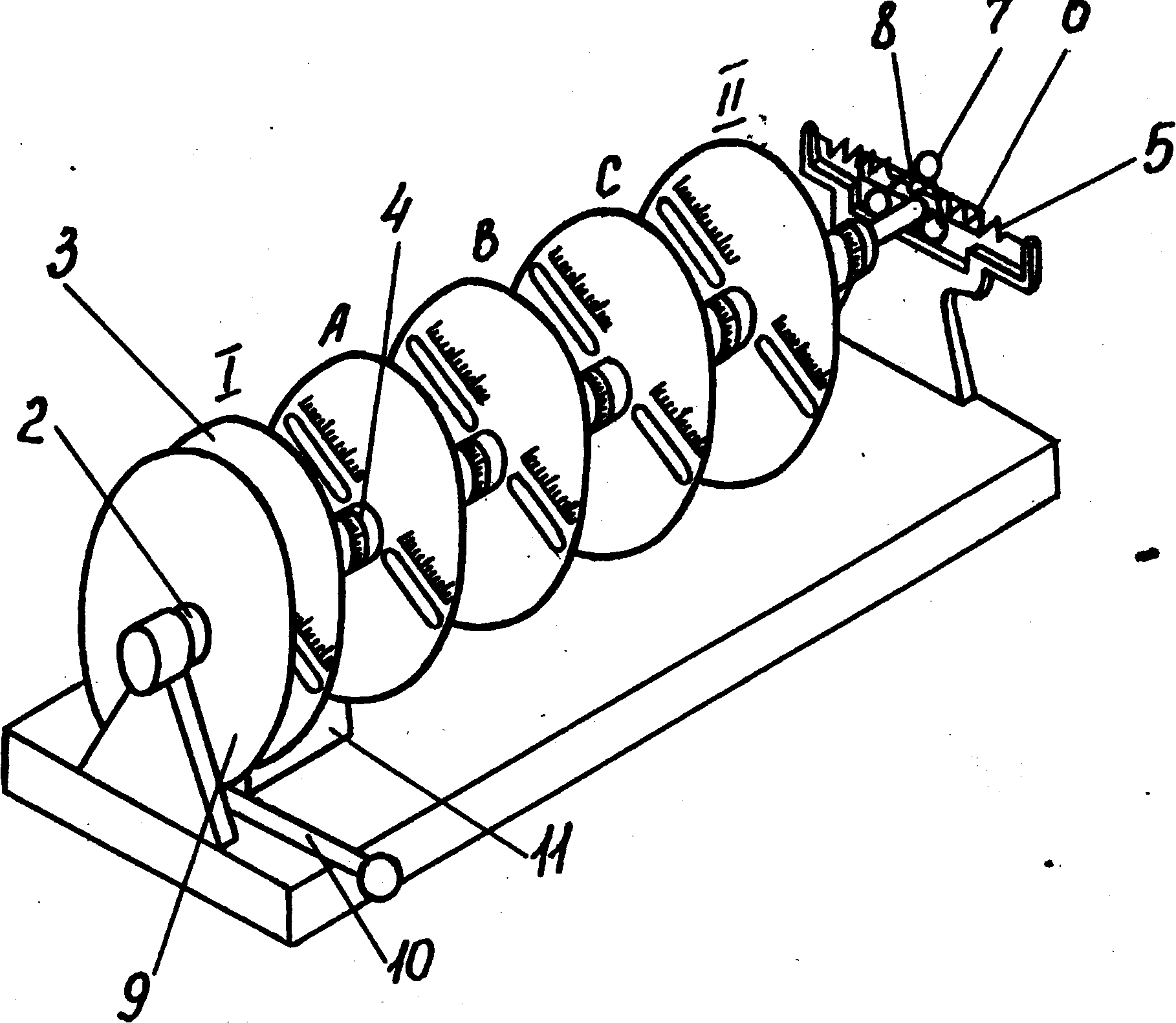
При звільненні рукоятки під дією ваги електродвигуна фрикціон і електродвигун вимикаються. Для регулювання ходу фрикціону передбачені регулювальні гвинти. Основою установки є чавунна плита, на якій закріплені стояки.
Установка забезпечена комплектом вантажів в 40, 50. 60 і 70 г, призначених для створення дисбалансу і для зрівноважування.
Для
повного зрівноваження обертових мас
треба, щоб головний вектор сил інерції
Рін
і
головний момент сил інерції
![]() дорівнювали нулю. Відомо, що
дорівнювали нулю. Відомо, що
![]() (1)
(1)
де
![]() - кутова швидкість обертання ланки;
- кутова швидкість обертання ланки;
![]() -
елементарна маса;
-
елементарна маса;
![]() -
відстань елементарної маси від осі
обертання.
-
відстань елементарної маси від осі
обертання.
При
![]()
![]() (2)
(2)
Оскільки
![]() ,
то
,
то
![]() (3)
(3)
Формула (2) визначає умову статичної зрівноваженості ротора. Крім цього,
![]() (4)
(4)
де
![]() -
відстань від елементарної маси до
площини зведення.
-
відстань від елементарної маси до
площини зведення.
При![]()
або
![]() (5)
(5)
Формула
(4) визначає умову динамічної зрівноваженості
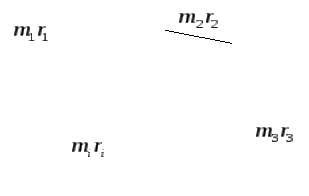
ротора. З формули (2) і /4/ випливає, що при
повному зрівноваженні сума
![]() статичних моментів мас і сума
статичних моментів мас і сума
![]() відцентрових моментів мас повинні
дорівнювати нулю (рис. 2).
відцентрових моментів мас повинні
дорівнювати нулю (рис. 2).
|
|
|
|
Рис. 2
| |
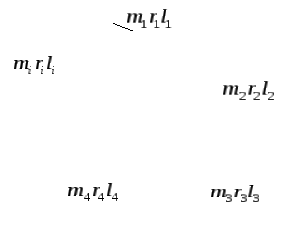
Переходячи
до розв’язання поставленого завдання,
припустимо, що на трьох проміжних дисках
А, В і С ротора (рис.1) встановлено не
зрівноважені вантажі
![]() .
Положення їх на дисках задано
радіусами-векторами Позначимо крайні
диски (лівий і правий), на які буде
встановлено противаги, відповідно І і
II. Вважатимемо, що площина зведення
проходить через середину лівого диска
І. Відстань між дисками І і II нехай
дорівнюватиме
.
Положення їх на дисках задано
радіусами-векторами Позначимо крайні
диски (лівий і правий), на які буде
встановлено противаги, відповідно І і
II. Вважатимемо, що площина зведення
проходить через середину лівого диска
І. Відстань між дисками І і II нехай
дорівнюватиме
![]() ,
а відстані від дисків А, В і С до площини
зведення
,
а відстані від дисків А, В і С до площини
зведення
![]() ,
відповідно. Вагу противаги при статичному
зрівноважуванні позначимо
,
відповідно. Вагу противаги при статичному
зрівноважуванні позначимо
![]() а радіус-вектор, що визначає положення
її центра ваги, - через
а радіус-вектор, що визначає положення
її центра ваги, - через
![]() .
Тоді за формулою (2), замінюючи маси
вагою, матимемо:
.
Тоді за формулою (2), замінюючи маси
вагою, матимемо:
![]() (5)
(5)
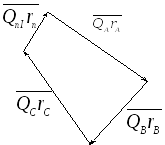
Якщо
за рівнянням (5) побудувати векторний
многокутник (рис.З), то замикаючий вектор
многокутника визначить в масштабі
добуток
![]() .
.
|
|
|
Рис. 3 |
Ваги
противаги на відстань її від осі обертання
вала ротора. Знаючи величину
![]() ,
можна визначити
,
можна визначити
![]() .
.
Вагу
противаг, що встановлюються на дисках
І і II при повному зрівноваженні ротора,
позначимо через
![]() і
і
![]() відповідно, а радіуси-вектори, які
визначають положення їх центрів ваги,
- через
відповідно, а радіуси-вектори, які
визначають положення їх центрів ваги,
- через
![]() і
і
![]() .
Тоді за формулами (2) і (4), замінюючи маси
вагою, матимемо:
.
Тоді за формулами (2) і (4), замінюючи маси
вагою, матимемо:
![]() (6)
(6)
![]() (7)
(7)
(член
![]() ,
оскільки
,
оскільки
![]() ).
).
При
цьому спочатку будують векторний
многокутник за рівнянням (7). Вектори
моментів зручно повернути на 90° до
збігання їх з напрямком векторів сил.
Модуль вектора що замикає многокутник,
дорівнюватиме
![]() .
Оскільки
.
Оскільки
![]() відоме, то з цього добутку легко визначити
відоме, то з цього добутку легко визначити
![]() ,
якщо задати
,
якщо задати
![]() .
Напрямок радіуса-вектора визначається
за кресленням.
.
Напрямок радіуса-вектора визначається
за кресленням.
Потім
будують векторний многокутник за
рівнянням (6). У цьому многокутнику
невідомою величиною буде замикаючий
вектор
![]() .
Задають
один із співмножників і знаходять
другий. Напрямок радіуса-вектора
визначають за кресленням (рис. 4).
.
Задають
один із співмножників і знаходять
другий. Напрямок радіуса-вектора
визначають за кресленням (рис. 4).