

3. Контрольні питання.
1. Що називається кінематичною парою?
2. Що називається кінематичним ланцюгом?
3. Що таке кінематична схема механізму?
4. Як класифікують кінематичні ланцюги?
5. За якими формулами визначають ступінь рухомості просторового і плоского механізму?
6. Які умовні позначення застосовують при складанні кінематичних схем?
7. Який механізм називають механізмом І-го класу?
8. Що таке група Ассура?
9. В якій послідовності проводять структурний аналіз механізму?
10. Як визначити клас і порядок групи Ассура?
11. Як визначають клас механізму?
Дрогобицький державний педагогічний університет імені Івана Франка
Кафедра машинознавства та охорони праці
Лабораторія теорії механізмів і машин
“ “ 200_
Група Дата виконання роботи
Прізвище та ініціали студента
Лабораторна робота № 1
Складання кінематичної схеми та структурний аналіз механізму
Мета роботи: складання кінематичної схеми механізмів за розмірами знятими з реальних механізмів або їх моделей, визначення класу і порядку механізмів.
Обладнання: діючий механізм або моделі плоских механізмів, таблиця з умовними позначеннями кінематичних пар і ланок, штангенциркуль, масштабна лінійка.
Результати досліджень:
1. Кінематична схема механізму в масштабі.
2. Розділення механізму на групи Ассура.
3. Визначення числа рухомих ланок, класу і кількості кінематичних пар.
Визначення ступеня рухомості механізму.
Визначення класу, порядку і виду кожної приєднаної до початкового механізму групи Ассура.
Встановлення класу механізму.
Структурна формула механізму.
Висновки:
|
підпис студента |
Робота захищена з оцінкою __________________________ підпис викладача |
Лабораторна робота №2 кінематичний аналіз механізмів методом діаграм
Мета роботи: навчитися будувати план положень заданого механізму, здійснити побудову діаграми переміщень повзуна кривошипно-повзунного механізму або цапфи коромисла кривошипно-коромислового механізму. Освоїти метод графічного диференціювання.
Обладнання: моделі плоского кривошипно-повзунного та кривошипно-коромислових механізмів, штангенциркуль, лінійка, олівець, рейсшина.
1. Теоретичні відомості.
Для
побудови плану положень механізму
необхідно за визначеними розмірами
ланок, побудувати його кінематичну
схему для 12-ти положень ведучої ланки
в масштабі:
![]() ;
;
де
![]() - дійсна довжина ведучої ланки (кривошипа)
механізму,
- дійсна довжина ведучої ланки (кривошипа)
механізму,
![]() -
вибрана довжина кривошипа механізму
на кінематичній схемі (плані положень).
-
вибрана довжина кривошипа механізму
на кінематичній схемі (плані положень).
Потім,
за встановленим значенням
![]() ,
знаходяться довжини інших ланок механізму
в прийнятому масштабі.
,
знаходяться довжини інших ланок механізму
в прийнятому масштабі.
Наприклад:
![]() ,
де
,
де
![]() - дійсна довжина шатуна.
- дійсна довжина шатуна.
Після цього будуються 12 положень ведучої ланки, яка здійснює обертовий рух, а далі циркулем методом засічок будуються положення цапфи повзуна чи коромисла. Послідовним з'єднанням однойменних точок механізму будується 12 його положень.
Кінематичною
діаграмою називається графічна залежність
кінематичного параметра точки механізму
(переміщення
![]() ,
швидкості v,
прискорення a)
від часу
,
швидкості v,
прискорення a)
від часу
![]() обертання кривошипа або кута його
повороту. Якщо за результатами
експериментальних досліджень переміщення
S
ланки (повзуна, коромисла) побудовано
діаграму переміщень заданої точки
S=S(t),
то графічним диференціюванням кривої
S=S(t)
можна побудувати діаграму швидкостей
v=v(t)
точки, а диференціюванням кривої v=v(t)
діаграму прискорень a=a(t)
точки.
обертання кривошипа або кута його
повороту. Якщо за результатами
експериментальних досліджень переміщення
S
ланки (повзуна, коромисла) побудовано
діаграму переміщень заданої точки
S=S(t),
то графічним диференціюванням кривої
S=S(t)
можна побудувати діаграму швидкостей
v=v(t)
точки, а диференціюванням кривої v=v(t)
діаграму прискорень a=a(t)
точки.
Діаграма переміщень S=S(t) будується від одного з крайніх положень ланки. Послідовно в кожній з 12 точок осі абсцис відкладаються переміщення повзуна (коромисла) у встановленому масштабі μS. З'єднавши побудовані точки плавною кривою отримаємо залежність S=S(t).
Послідовність виконання графічного диференціювання можна розглянути на прикладі побудови графіка швидкості v=v(t) за графіком переміщення S=S(t).
Абсцису
кривої S=S(t)
поділяють на n
(в цьому разі - на шість частин (рис. І).
Потім відкладають ординати
![]() до перетину їх з кривою S=S(t)
і сполучають отримані точки перетину
хордами
до перетину їх з кривою S=S(t)
і сполучають отримані точки перетину
хордами
![]() .На осі абсцис, ліворуч від графіка
швидкості відкладають полюсну відстань
.На осі абсцис, ліворуч від графіка
швидкості відкладають полюсну відстань
![]() .
З полюса
.
З полюса
![]() паралельно до хорд на графіку переміщень
проводять промені до перетину з віссю
ординат. З отриманих точок перетину
проводимо прямі паралельно до осі абсцис
до перетину з прямими, паралельними
до осі ординат проведеними із середини
відрізків
паралельно до хорд на графіку переміщень
проводять промені до перетину з віссю
ординат. З отриманих точок перетину
проводимо прямі паралельно до осі абсцис
до перетину з прямими, паралельними
до осі ординат проведеними із середини
відрізків
![]() Знайдені точки І, 2, З, ... сполучають
плавною кривою, яка буде діаграмою
швидкостей точки v=v(t).
Графік прискорення a=a(t)
будують аналогічно, диференціюванням
графіка швидкості v=v(t).
Знайдені точки І, 2, З, ... сполучають
плавною кривою, яка буде діаграмою
швидкостей точки v=v(t).
Графік прискорення a=a(t)
будують аналогічно, диференціюванням
графіка швидкості v=v(t).
|
|
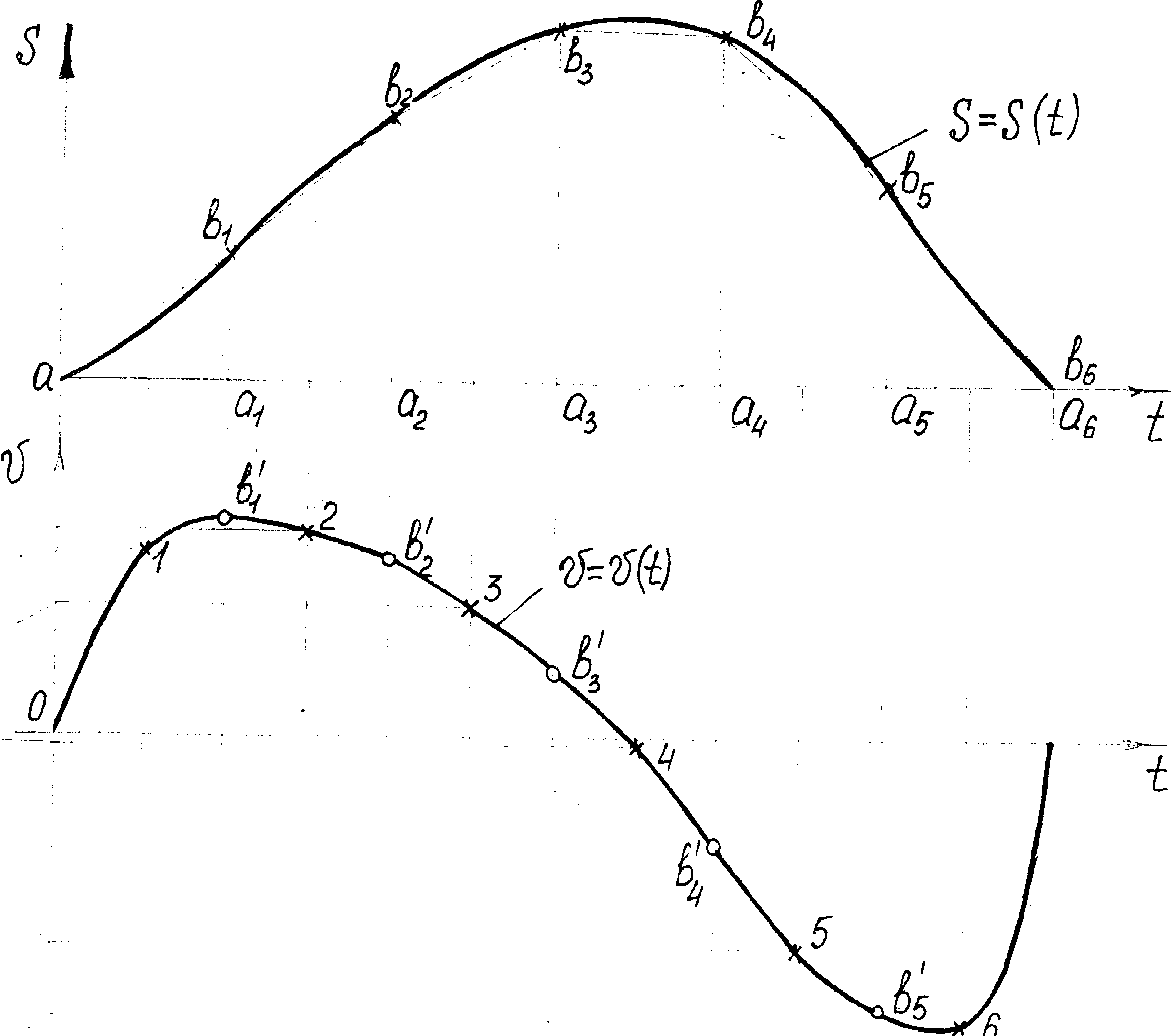
Рис. 1.
Масштаби
для осей
![]() відповідно визначаються за такими
формулами:
відповідно визначаються за такими
формулами:
![]() ,
,
де
![]() -
дійсне найбільше переміщення повзуна
(цапфи коромисла) моделі;
-
дійсне найбільше переміщення повзуна
(цапфи коромисла) моделі;
![]() -
найбільша ордината на діаграмі переміщень:
-
найбільша ордината на діаграмі переміщень:
![]()
де
![]() - відрізок, що відповідає повному оберту
ведучої ланки (звикло беруть
- відрізок, що відповідає повному оберту
ведучої ланки (звикло беруть
![]() );
);
![]() -
полюсна відстань діаграми швидкостей,
мм;
-
полюсна відстань діаграми швидкостей,
мм;
![]()
де
![]() - полюсна відстань діаграми прискорень,
мм;
- полюсна відстань діаграми прискорень,
мм;
![]() може
бути рівна
може
бути рівна
![]() ,
а може бути більша чи менша за
,
а може бути більша чи менша за
![]() .
.