

1. Теоретичні відомості
У різних машинах і приладах широко використовуються механізми для передачі обертового руху з постійним передаточним відношенням між двома заданими в просторі осями.
Механізми передач служать для передавання обертового руху між двома ланками. Найпростішим таким механізмом є триланковий або одноступеневий механізм, який складається з двох рухомих ланок, що входять у дві обертальні та одну вищу кінематичні пари Для забезпечення достатньо значних передаточних відношень в сучасник машинах часто використовують складні механізми передач – багатоступеневі. Передавання руху здійснюється з ведучого вала на проміжні, а з них на ведений вал. Таким чином, складний механізм передач можна розділити на окремі частини - ступені, кожна з яких складається із двох ланок (коліс), що входять у вищу кінематичну пару. Така окрема частина складного механізму називається ступінню передачі.
Механізми
передач характеризуються передаточним
відношенням
![]() ,
що означає відношення кутової швидкості
,
що означає відношення кутової швидкості
![]() ланки 1 до кутової швидкості
ланки 1 до кутової швидкості
![]() ланки 2, тобто
ланки 2, тобто
![]() . (1)
. (1)
Крім
цього передаточне відношення
![]() може бути виражене також через частоти
обертання
може бути виражене також через частоти
обертання
![]() і
і
![]() ланок або геометричні розміри (діаметри,
радіуси) обертових ланок так:
ланок або геометричні розміри (діаметри,
радіуси) обертових ланок так:
![]() (2)
(2)
де
![]() та
та
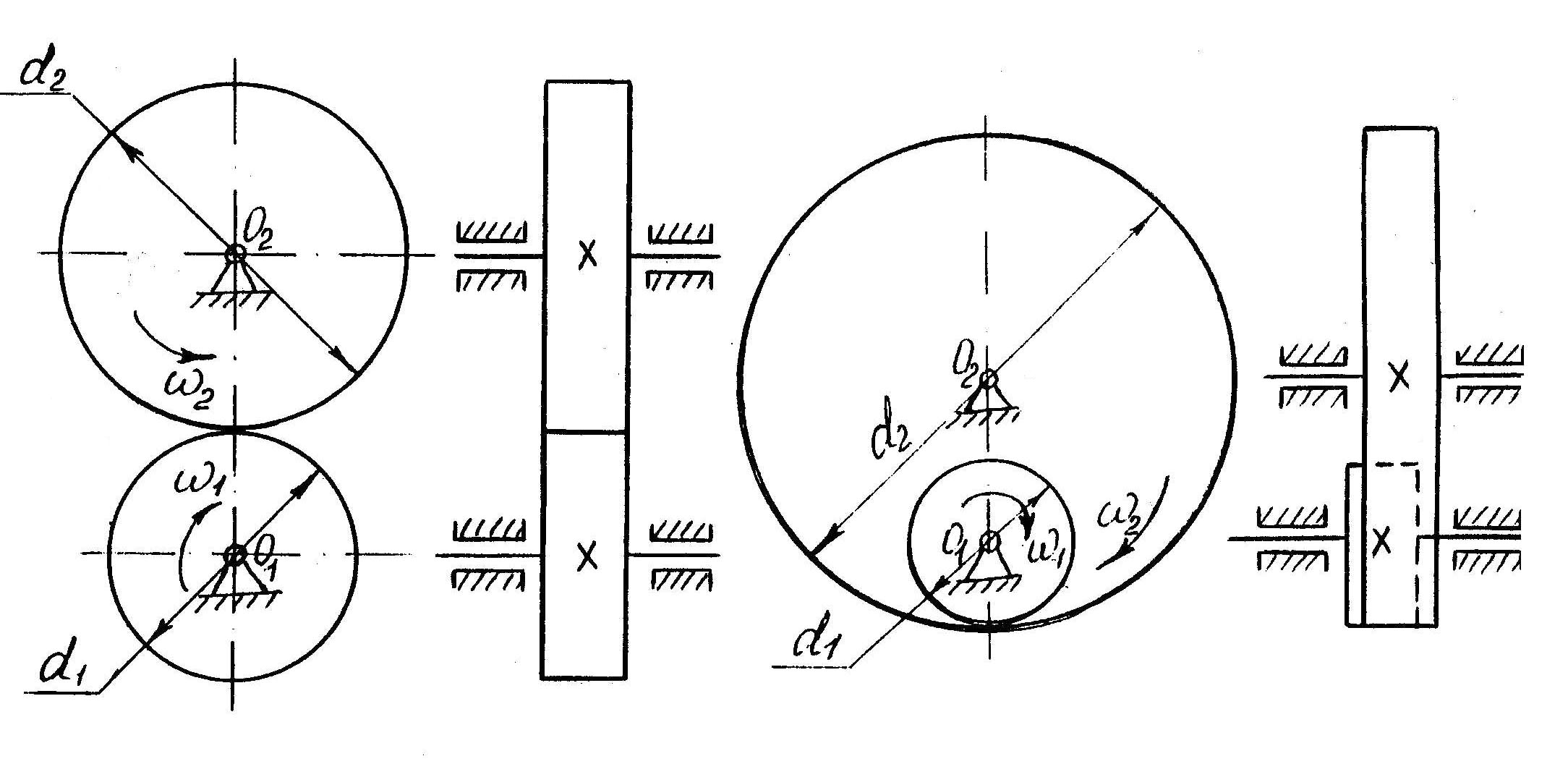
![]() відповідно радіуси та діаметри (рис. 1)
ланок 1 та 2.
відповідно радіуси та діаметри (рис. 1)
ланок 1 та 2.
Механізми
передач можуть бути із зовнішнім (рис.
1) та внутрішнім зачепленням (рис. 2). У
випадку зовнішнього зачеплення кутові
швидкості
![]() і
і
![]() ланок мають протилежний напрям і
передаточне число
ланок мають протилежний напрям і
передаточне число
![]() вважається від'ємним, для внутрішнього
зачеплення
вважається від'ємним, для внутрішнього
зачеплення
![]() і
і
![]() мають однаковий напрям і передаточне
число є додатнім.
мають однаковий напрям і передаточне
число є додатнім.
Механізми передач обертового руху, що передається шляхом безпосереднього дотику ланок, конструктивно виконується у вигляді гладких тіл обертання (циліндричних, конічних) - фрикційні передачі та зубчастих коліс різного виду - зубчасті передачі.
|
| ||
|
Рис.1 |
Рис.2 |
|
Передаточне відношення одноступеневої зубчастої передачі визначається так:
![]()
де
![]() - числа зубів 1-го і 2-го зубчастих коліс.
- числа зубів 1-го і 2-го зубчастих коліс.
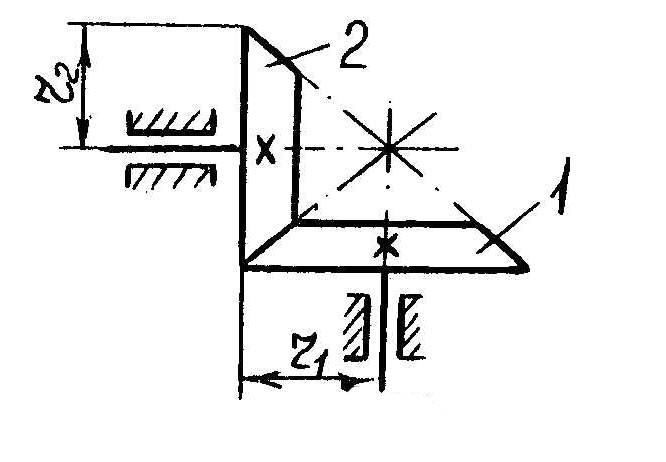
Для конічної зубчастої передачі (рис. 3) передаточне число може бути визначено наступним чином:
![]()
|
|
|
|
Рис 3 |
Рис 4 |
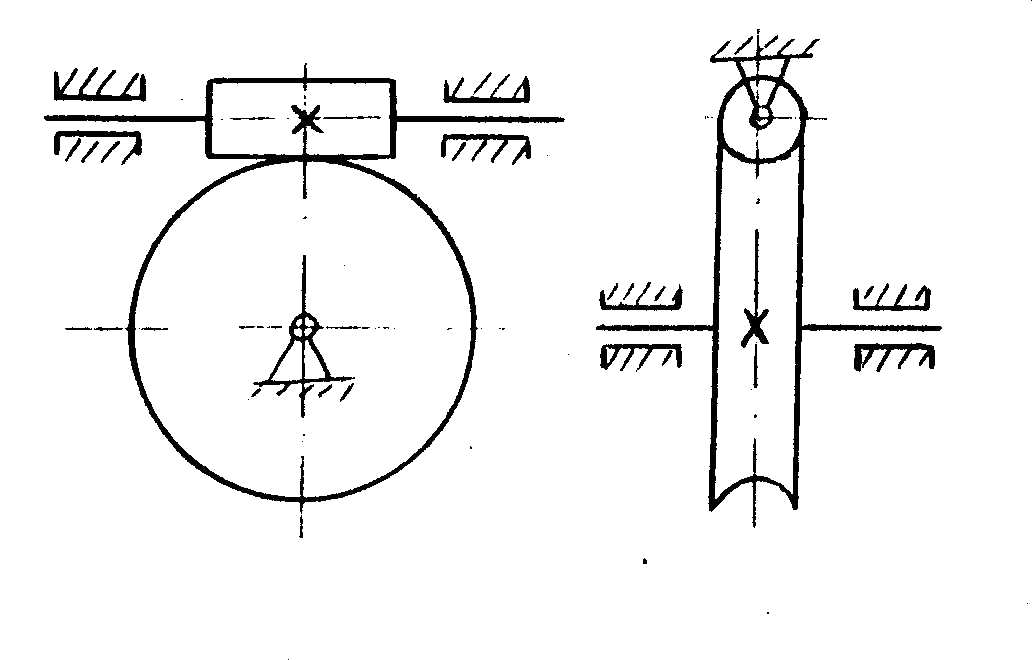
Для черв'ячних передач (рис. 4) передаточне число визначається за формулою:
![]() (3)
(3)
де
![]() - число зубів черв'ячного колеси,
- число зубів черв'ячного колеси,
![]() -
число заходів черв'яка.
-
число заходів черв'яка.
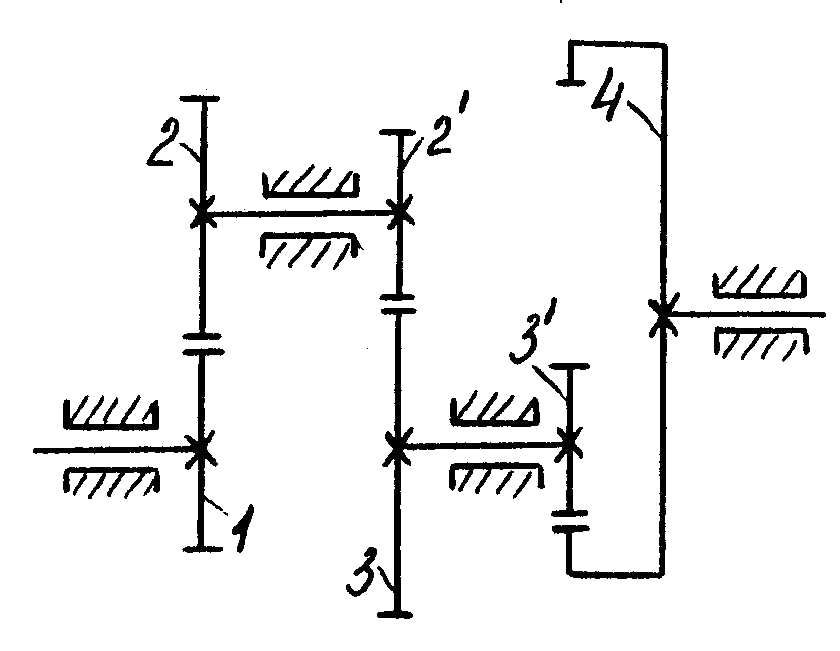
Передаточне відношення для складної багатоступеневої передачі (рис. 5) дорівнює добутку взятих з своїми знаками передаточних відношень окремих ступеней.
![]() (4)
(4)
де
![]() (5)
(5)
У загальному випадку, коли в зачепленні знаходиться nколіс, вираз для знаходження загального передаточного відношення може бути записаний так
|
Рис.5 |
![]() (6)
(6)
де
![]() передаточні відношення кожної із
ступіней, які визначаються згідно (3),
тобто:
передаточні відношення кожної із
ступіней, які визначаються згідно (3),
тобто:
![]() (7)
(7)
Підставивши вирази (7) в формулу (6) отримуємо співвідношення для визначення передаточного відношення багатоступеневої зубчастої передачі
![]()
де m - число зовнішніх зачеплень.
У розглянутих прикладах зубчастих передач осі обертання коліс не мають взаємного переміщення. Однак є передачі, в яких осі обертання окремих зубчастих коліс можуть переміщатися. Такі зубчасті механізми називаються епіциклічними (рис. 6)
|
|
|
|
Рис. 6 |
|
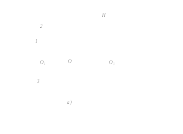
Вони бувають планетарними (рис. 6,а) та диференціальними (рис. 6,б)
Планетарні механізми мають одну ведучу ланку, володіють однією ступінню рухомості . Вони забезпечують великі передаточні відношення при незначній різниці розмірів ланок.
Диференціальні механізми мають дві ведучі ланки, тобто володіють двома ступенями рухомості. Такі механізми служать для додавання або віднімання кутових швидкостей ланок.
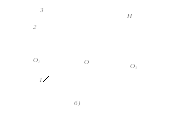
Найпростіші механізми такого виду складаються із сонячного колеса 3, сателіта 2, повідця (водила) Н. Планетарні механізми характерні тим, що сонячне колесо 3 закріплене нерухомо, обертання зазнає сателіт 2 навколо власної осі Н та разом з повідцем навколо осі О.
У диференціальних механізмах всі зубчасті колеса обертаються навколо власних осей О1, О3 і, крім того, сателіт 2 обертається разом з повідцем Н навколо осі 0.
Передаточне відношення планетарного механізму визначається за формулою
![]() (9)
(9)
де верхній індекс умовно позначає нерухому ланку.
Для
виведення формули, що зв'язує кутові
швидкості
![]() ланок 1,3 та Н, застосовуємо метод обертання
руху, за допомогою якого можна умовно
перетворивши диференціальний механізм
в обернений, тобто у звичайний зубчастий
механізм з нерухомими осями.
ланок 1,3 та Н, застосовуємо метод обертання
руху, за допомогою якого можна умовно
перетворивши диференціальний механізм
в обернений, тобто у звичайний зубчастий
механізм з нерухомими осями.
Передаточне відношення оберненого механізму
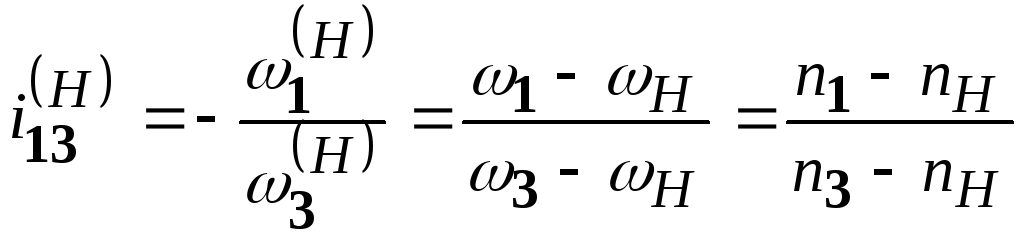
Відношення
між кутовими швидкостями ланок
диференціального механізму можна
виразити рівністю
![]()