

обработка результатов измерений
.pdf6. Лабораторная работа 6. Изучение вращательного движения |
|
||||
Введение |
|
|
|
|
|
Основное уравнение динамики вращательного движения имеет вид |
|
||||
|
ε = |
M |
р |
. |
(96) |
|
J |
|
|||
|
|
|
|
|
|
Здесь ε |
– угловое ускорение, Mр – результирующий момент внешних сил, действующих на |
||||
|
|
|
|
n |
|
твердое |
тело относительно оси вращения, |
J = ∑mi ri2 - момент инерции |
твердого тела |
||
i=1
относительно оси вращения.
Цель работы: проверить основной закон динамики вращательного движения. 6.1. Описание экспериментальной установки и методика измерений
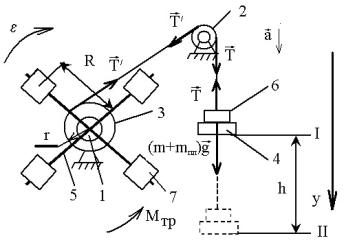
Схема экспериментальной установки представлена на рисунке 18. На двухступенчатый шкив 3 маятника 1 намотана нить, перекинутая через блок 2. К нити прикреплена платформа 4 массой mпл, на которую можно размещать грузы 6 массой m. Маятник Обербека представляет собой крестовину 5, имеющую общую ось со шкивом 3. Крестовина и шкивы закреплены между собой жестко. На стержни крестовины надеваются одинаковые грузы 7 массой m0. Закрепляя эти грузы в разных местах крестовины, можно изменять момент инерции системы “крестовина-грузы”. Если предоставить свободное движение грузу 6, то маятник придетr в движение: груз 6 с платформой будет опускаться вниз поступательно с ускорением a , крестовина с грузами 7 будет вращаться вокруг горизонтальной оси с ускорением ε.
Рисунок 18 – Маятник Обербека.
Рассмотрим систему "крестовина-грузы”. На груз 6 с платформой 4 действует сила тяжести (m + mпл )g и натяжение нити T . Груз с платформой движется равноускоренно. На крестовину действует относительно оси вращения момент M = T′ r силы натяжения нити T′
и момент M тр силы трения. |
|
|
|
|
|
|
Уравнения движения груза и крестовины имеют вид: |
|
|||||
(m + m |
пл |
) a = (m + m |
пл |
) g −T. |
|
|
|
|
|
(97) |
|||
(J0 + 4 m0 R 2 ) ε = T′ r −Mтр, |
||||||
|
||||||
где J0 – момент инерции крестовины, R – расстояние от оси вращения до грузов 7, r – радиус ступени шкива 3. T=T′ – в силу не растяжимости нити и невесомости шкива 2.
Совместное решение уравнений (97), относительно ε дает следующее выражение для углового ускорения
40
ε = |
(m + mпл ) g r − Mтр |
|
J0 + 4 m0 R 2 + (m + mпл ) r2 . |
(98) |
Ввиду малости последнего слагаемого в знаменателе выражения (98) в дальнейшем для
углового ускорения используется приближенная формула |
|
|||
ε = |
M − M тр |
, |
(99) |
|
J |
||||
|
|
M = (m + mпл ) g r – |
||
где J=J0+4 m0 R2 – момент инерции системы |
“крестовина-грузы”, |
|||
момент силы, действующей на груз 6 с платформой 4 (условно – движущая сила).
Из выражения (99) видно, что, во-первых, угловое ускорение системы прямо
пропорционально результирующему моменту сил относительно оси вращения (при постоянном моменте инерции относительно оси вращения) и обратно пропорционально моменту инерции относительно оси вращения (при постоянном результирующем моменте сил), во-вторых.
Проверка основного уравнения вращательного движения сводится к проверке двух утверждений. Соответственно, и, экспериментальная работа разбивается на два задания. Первое задание. Проверка утверждения: угловое ускорение системы прямо пропорционально результирующему моменту сил относительно оси вращения (при
постоянном моменте инерции J = J0 + 4 m0 R 2 = const. ). Выражение (99) можно записать в виде
|
1 |
|
|
M |
тр |
|
|
ε = |
M + |
− |
|
, |
(100) |
||
|
|
|
|||||
|
J |
|
|
J |
|
|
|
|
|
|
|
|
|||
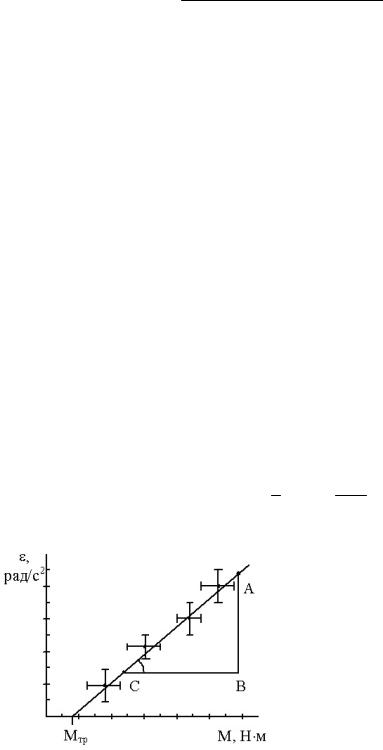
что указывает на линейную зависимость углового ускорения от момента сил M.
Тогда, зависимость углового ускорения от момента силы ε = f1 (M) является линейной вида y=k x+b (см. (100)), где в качестве углового коэффициента прямой выступает величина
обратная моменту инерции системы k = 1J , b = − MJтр , y=ε, x=M. Графиком указанной
зависимости ε = f1 (M) является прямая, не проходящая через начало координат (рисунок 19).
Таким образом, для выполнения первой серии опытов необходимо проводить измерение углового ускорения грузов при
различных |
моментах |
силы |
M = (m + mпл ) g r , |
но при |
постоянном |
моменте инерции J. Для обеспечения неизменности момента инерции в опытах следует устанавливать грузы m0 на крестовине на одинаковом расстоянии R от оси вращения и в данном задании не менять его.
Рисунок 19 – Зависимость углового ускорения крестовины от момента силы М.
По угловому коэффициенту прямой можно определить момент инерции системы |
|
||||
k = |
AB |
= |
1 |
. |
(101) |
BC |
|
||||
|
|
J |
|
||
Отрезок, отсекаемый прямой на оси абсцисс, характеризует величину момента силы трения. Это видно из выражения (100).
Второе задание. Проверка утверждения: угловое ускорение системы обратно пропорционально ее моменту инерции (при постоянном моменте силы M).
41
Выражение (99) можно записать в виде |
|
||
ε = (M − M тр ) |
1 |
. |
(102) |
|
|||
|
J |
|
|
Если сила M, в серии опытов постоянна, то для каждого значения приведенной массы M при движении системы будет наблюдаться ускорение обратно пропорциональное этой массе.
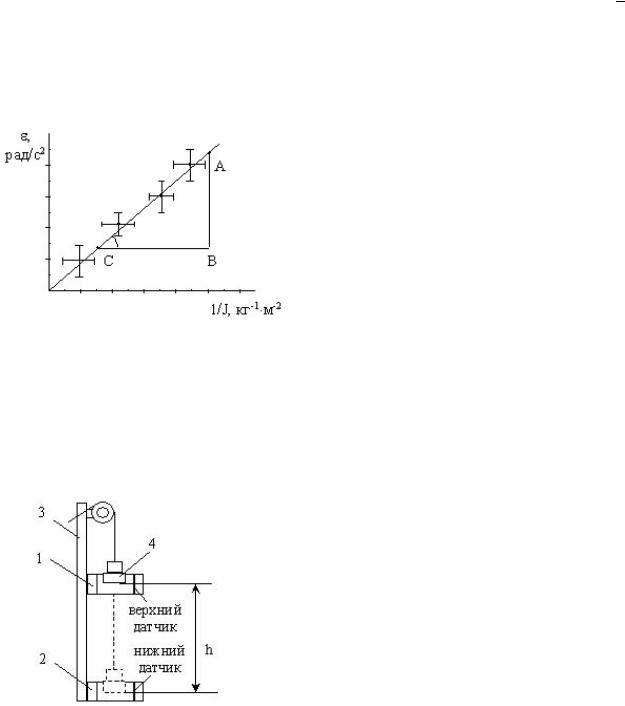
Тогда, зависимость углового ускорения от обратной величины момента инерции ε = f2 1J
является линейной вида y=k x (см. (102)), где в качестве углового коэффициента прямой
выступает |
величина равная результирующему |
моменту |
сил, |
действующих на |
систему, |
|||||||||
k = M − M |
тр , y=ε, x = |
1 |
. Графиком указанной |
зависимости |
ε = f |
|
1 |
|
|
|||||
|
2 |
|
является |
прямая, |
||||||||||
J |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
J |
|
|
||
проходящая через начало координат (рисунок 20). |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
По угловому коэффициенту прямой можно |
||||||||||
|
|
|
|
определить результирующий момент сил |
||||||||||
|
|
|
|
|
k = |
AB |
|
= M − M тр . |
|
(103) |
||||
|
|
|
|
|
BC |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Таким образом, для выполнения второй серии |
||||||||||
|
|
|
|
опытов необходимо проводить замеры углового |
||||||||||
|
|
|
|
ускорения грузов для различных моментов |
||||||||||
|
|
|
|
инерции при постоянном моменте силы M. |
||||||||||
|
|
|
|
Для обеспечения неизменности момента силы |
||||||||||
|
|
|
|
M = (m + mпл ) |
g r |
в |
|
|
опытах |
|
следует |
|||
Рисунок 20 – Зависимость ускорения грузов от |
пользоваться |
одной |
ступенью |
шкива и |
||||||||||
величины обратной моменту инерции системы J. |
устанавливать |
на платформу груз |
неизменной |
|||||||||||
|
|
|
|
массы. |
|
|
|
|
|
|
|
|
|
|
Момент инерции системы изменяют перемещением грузов на крестовине.
Угловое ускорение может быть определено экспериментально по измерениям времени
равноускоренного опускания груза 6 с заданной высоты h |
|
|||
ε = |
4h |
, |
(104) |
|
t 2 d |
||||
|
|
|
||
6.2. Порядок выполнения работы
6.2.1.Получить принадлежности у преподавателя. Приборы и принадлежности: установка – маятник Обербека, набор грузов, штангенциркуль.
Первое задание.
6.2.2.На стержнях на одинаковых расстояниях R от оси вращения строго симметрично установить тела 7 (рисунок 18). Их положение не меняется во всех опытах первой серии, тем самым сохраняется неизменным момент инерции крестовины. Измерить и записать значение R – расстояние от оси вращения до центра масс тел на крестовине в таблицу 18. Расстояние между рисками на крестовине 1 см.
Получить у преподавателя разрешение на проведение измерений.
6.2.3.Включить установку тумблером “Сеть”.
Таблица 18 – Результаты измерений первого задания.
№ |
d, |
m+mпл, |
M, |
t, c |
tср, c |
σ(t) , |
εср, |
σ(ε), |
Доп. |
п/п |
м |
кг |
Н·м |
|
|
c |
c-² |
c-2 |
данные |
1 |
|
|
|
1…. |
|
|
|
|
h=… м, |
|
|
|
|
2…. |
|
|
|
|
mпл=…кг, |
|
|
|
|
3…. |
|
|
|
|
g=9,8 м/с2, |
|
|
|
|
|
|
|
|
|
R=… м |
… |
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
Mтр=… Н м |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J=… кг м2 |
|
|
|
|
|
|
|
|
|
|
6.2.4. Установить на платформу груз массой m. Перевести в нажатое состояние кнопку “Пуск”. Нить намотать на один из шкивов так, чтобы нижний край платформы был на уровне верхнего края красного флажка (для установки, снабженной электронным блоком ФМ-1/1) или немногим выше верхнего датчика (для установки FРМ-15), чтобы световой луч не был перекрыт грузом. Отжать кнопку “Пуск” (включится тормозной электромагнит и зафиксирует груз в верхнем положении) и нажать кнопку “Сброс” для перевода миллисекундомера в режим готовности.
6.2.5. Измерить высоту падения h груза по шкале на стойке и радиус шкива штангенциркулем. Записать в таблицу 18 значение диаметра шкива d, высоту падения h, массы груза m и массы платформы mпл (значения масс указаны на грузах с погрешностью 1
г).
6.2.6.Нажать кнопку “Пуск”, предоставив грузу 4 (рисунок 21) возможность падать. Записать показания времени падения t груза с данной высоты h в таблицу 18. Опыт провести три раза.
6.2.7.Изменяя момент силы M = (m + mпл ) g r провести еще (п. 6.2.6) не менее 4 опытов с
разными грузами m и обоими шкивами так, чтобы момент силы M был разным. Результаты занести в таблицу 18.
Второе задание.
6.2.8.Опыты проводить на одном шкиве при неизменной массе падающего груза m, что обеспечивает постоянство момента силы.
6.2.9.Провести измерения времени падения груза с заданной высоты h для пяти разных симметричных расположений тел на крестовине. Каждый опыт повторить не менее трех раз, результаты занести в таблицу 19.
6.2.10.Выключить установку. Определить систематические погрешности приборов и выбрать коэффициент Стьюдента. Сдать принадлежности преподавателю.
43
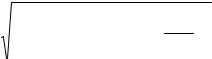
Таблица 19 – Результаты измерения второго задания.
№ |
R, м |
J, |
1/J, |
t , c |
tср, c |
σ(t) , |
εср, |
σ(ε), |
Доп. данные |
п/п |
|
кг·м² |
кг-1·м-² |
|
|
c |
c-² |
c-2 |
|
1 |
|
|
|
1…. |
|
|
|
|
r=… м, |
|
|
|
|
2…. |
|
|
|
|
m=… кг, |
|
|
|
|
3…. |
|
|
|
|
m0=… кг, |
|
|
|
|
|
|
|
|
|
J0=… кг м2 |
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mтр=… Н м |
|
|
|
|
|
|
|
|
|
|
6.3. Обработка результатов измерений
6.3.1. Оценить время tср и ускорение εср (104) в каждом из опытов первого задания,
погрешность измерения времени σ(t) и погрешность ускорения σ(ε) |
|
||||||||||
σ(ε)= ε |
|
|
σ(d) 2 |
|
2σ(t) 2 |
|
σ(h) |
2 |
|
||
ср |
|
|
|
+ |
|
|
+ |
|
. |
(105) |
|
|
|
||||||||||
|
|
d |
|
|
|
|
h |
|
|
||
|
|
|
tср |
|
|
||||||
Заполнить таблицу 18.
6.3.2.Построить график зависимости углового ускорения от момента силы (пример на рисунке 19). Определить по графику момент инерции системы J (101). Снять с графика значение момента силы трения Mтр. Записать данные в таблицу 19.
6.3.3.Из выражения J = J0 + 4 m0 R 2 определить момент инерции крестовины J0. Записать
значение в таблицу 20.
6.3.4.Выполнить п. 6.3.1. для второй серии опытов. Заполнить таблицу 20.
6.3.5.Построить график зависимости углового ускорения от величины обратной моменту инерции системы (пример на рисунке 20). Определить по графику результирующий момент силы (103) и момент силы трения. Записать данные в таблицу 20.
6.3.6.Сформулировать выводы. Оформить отчет по лабораторной работе.
6.4. Контрольные вопросы
6.4.1.Какова цель данной работы и в чем заключается сущность метода проверки основного закона вращательного движения для данной системы.
6.4.2.Какие бывают виды движения твердого тела? Разложение одного сложного движения на составляющие.
6.4.3.Дать физический смысл величин: вектор элементарного углового перемещения, угловой скорости, углового ускорения. Связь этих величин с линейными кинематическими параметрами.
6.4.4.Момент инерции, его физический смысл. От чего он зависит? Как рассчитывается?
6.4.5.Вывести формулу (99).
6.4.6.Основной закон динамики вращательного движения. Объяснить физический смысл величин, входящих в этот закон.
6.4.7.Объяснить метод расчета момента инерции крестовины с грузами в данной работе.
6.4.8.От чего зависят угловые коэффициенты прямых на рисунках 19, 20? И почему?
6.4.9.Что характеризует отрезок, отсекаемый прямой на оси абсцисс? И почему?
44
7. Лабораторная работа 7. Измерение момента инерции на маятнике Обербека
Введение
Основное уравнение динамики вращательного движения имеет вид |
|
||||
|
ε = |
M |
р |
. |
(106) |
|
J |
|
|||
|
|
|
|
|
|
Здесь ε |
– угловое ускорение, Mр – результирующий момент внешних сил, действующих на |
||||
|
|
|
|
n |
|
твердое |
тело относительно оси вращения, |
J = ∑mi ri2 - момент инерции |
твердого тела |
||
i=1
относительно оси вращения.
Целью работы является проверка применимости основного закона динамики вращательного движения к данной механической системе, определение момента инерции вращающейся части установки.
7.1. Описание экспериментальной установки и методика измерений
Схема экспериментальной установки представлена на рисунке 22. На двухступенчатый шкив 3 маятника 1 намотана нить, перекинутая через блок 2. К нити прикреплена платформа 4 массой mпл, на которую можно размещать грузы 6 массой m. Маятник Обербека представляет собой крестовину 5, имеющую общую ось со шкивом 3. Крестовина и шкивы закреплены между собой жестко. На стержни крестовины надеваются одинаковые грузы 7 массой m0. Закрепляя эти грузы в разных местах крестовины, можно изменять момент инерции системы “крестовина-грузы”. Если предоставить свободное движение грузу 6, то маятник придетr в движение: груз 6 с платформой будет опускаться вниз поступательно с ускорением a , крестовина с грузами 7 будет вращаться вокруг горизонтальной оси с ускорением ε.
Рисунок 22 – Маятник Обербека.
Рассмотрим систему "крестовина-грузы”. На груз 6 с платформой 4 действует сила тяжести (m + mпл )g и натяжение нити T . Груз с платформой движется равноускоренно. На
крестовину действует относительно оси вращения момент M = T′ r силы натяжения нити T′ и момент M тр силы трения.
Уравнения движения груза и крестовины имеют вид:
(m + mпл′ ) a = (m + mпл ) g −T. (107)J ε = T r − Mтр,
где J– момент инерции крестовины с грузами 7, r – радиус ступени шкива 3. T=T′ – в силу не растяжимости нити и невесомости шкива 2.
45

Совместное решение уравнений (107), относительно ε дает следующее выражение для углового ускорения
ε = (m + m( пл ) g r)− Mтр . (108) J + m + mпл r2
Ввиду малости последних слагаемых в знаменателе и числителе выражения (108) в
дальнейшем для углового ускорения используется приближенная формула |
||||
ε = |
(m + mпл ) g r |
. |
(109) |
|
J |
||||
где J=J0+4 m0 R2 – момент инерции |
|
M = (m + mпл ) g r – |
||
системы “крестовина-грузы”, |
||||
момент силы, действующей на груз 6 с платформой 4 (условно – движущая сила).
Из выражения (109) видно, что, во-первых, угловое ускорение системы прямо
пропорционально результирующему моменту сил относительно оси вращения (при постоянном моменте инерции относительно оси вращения) и обратно пропорционально моменту инерции относительно оси вращения (при постоянном результирующем моменте сил), во-вторых.
Угловое ускорение крестовины ε связано с ускорением а груза 6 с платформой очевидной формулой
ε = |
a |
, |
(110) |
|
r |
||||
|
|
|
где r – радиус шкива. Ускорение груза 6 с платформой при равноускоренном движении
a = |
2h |
. |
(111) |
|
|||
|
t2 |
|
|
Тогда, угловое ускорение может быть определено экспериментально по измерениям времени t равноускоренного опускания груза 6 с заданной высоты h
ε = |
4h |
, |
(112) |
|
t2 d |
||||
|
|
|
где d=2r – диаметр шкива.
Приравнивая правые части (109) и (112) и выражая из полученного момент инерции, придем к экспериментальной формуле
|
|
|
|
|
g t |
2 |
|
d |
2 |
|
J |
эксп |
= (m +m |
пл |
) |
|
−1 |
|
(113) |
||
|
|
|
||||||||
|
|
|
2 h |
|
4 |
|
||||
|
|
|
|
|
|
|
||||
Теоретическое значение момента инерции крестовины с грузами определяется по теореме Штейнера
Jтеор = J0 +4 m0 R2 , |
(114) |
где J0 – момент инерции крестовины (двухступенчатого диска, четырех стержней крестовины, оси и втулки крестовины).
Формула (113) позволяет экспериментально определить как момент инерции крестовины с грузами, так и момент инерции крестовины J0 без грузов.
Порядок измерения моментов инерции заключается в следующем. Сначала экспериментально измеряется момент инерции крестовины с грузами J1,эксп, а, затем, момент инерции крестовины без грузов J2,эксп= J0. Зная момент инерции крестовины без грузов, по формуле (114) можно определить момент инерции крестовины с грузами и сравнить теоретическое значение с экспериментальным.
46
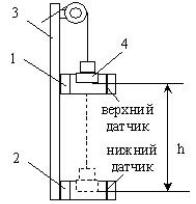
Установка FPM-15 снабжена фотоэлектрическими датчиками, закрепленными на кронштейнах 1, 2 (рисунок 23). Кронштейны установлены на стойке 3. Верхний кронштейн можно перемещать вдоль стойки и фиксировать его в любом положении, определяя, таким образом, длину пути h груза.
С целью отсчета длины пути, на стойке нанесена миллиметровая шкала.
Фотоэлектрический датчик на верхнем кронштейне фиксирует начало движения груза. Датчик на нижнем кронштейне вырабатывает электроимпульс конца измерения времени и включает тормозной электромагнит. На основании установки закреплен миллисекундомер.
Установка, снабженная электронным блоком ФМ-1/1, не имеет верхнего датчика. В данном случае отсчет времени начинается с момента нажатия на кнопку “Пуск”. При этом отключается тормозной электромагнит и система приходит в ускоренное движение.
7.2. Порядок выполнения работы
7.2.1.Получить принадлежности у преподавателя. Приборы и принадлежности: установка – маятник Обербека, набор грузов, штангенциркуль.
7.2.2.На стержнях на одинаковых расстояниях R от оси вращения строго симметрично установить тела 7 (рисунок 22). Их положение не меняется во всех опытах. Измерить и записать значение R в таблицу 20. Расстояние между рисками на крестовине 1 см.
Таблица 20 – Исходные данные.
h, |
d, |
mпл, |
m, |
m0, |
R, |
g, |
м |
м |
кг |
кг |
кг |
м |
м/с2 |
|
|
|
|
|
|
|
Получить у преподавателя разрешение на проведение измерений.
7.2.3.Включить установку тумблером “Сеть”.
7.2.4.Установить на платформу груз массой m. Перевести в нажатое состояние кнопку “Пуск”. Нить намотать на один из шкивов так, чтобы нижний край платформы был на уровне верхнего края красного флажка (для установки, снабженной электронным блоком ФМ-1/1) или немногим выше верхнего датчика (для установки FРМ-15), чтобы световой луч не был перекрыт грузом. Отжать кнопку “Пуск” (включится тормозной электромагнит и зафиксирует груз в верхнем положении) и нажать кнопку “Сброс” для перевода миллисекундомера в режим готовности.
7.2.5.Измерить высоту падения h груза по шкале на стойке. Измерить диаметр шкива d штангенциркулем. Записать в таблицу 20 значение высоты падения h, массы груза m и массы платформы mпл (значения масс указаны на грузах).
7.2.6.Нажать кнопку “Пуск”, предоставив грузу 4 возможность падать. Снять показания времени падения t груза с данной высоты h. Опыт провести не менее пяти раз. Записать значения времени в таблицу 21 (строка 1).
7.2.7.Снять грузы с крестовины. Провести измерения времени падения груза 4 не менее пяти раз (без грузов на крестовине). Записать значения времени в таблицу 21 (строка 2).
7.2.8.Выключить установку. Установить грузы на крестовину.
7.2.9.Определить систематические погрешности приборов и выбрать коэффициент Стьюдента. Сдать принадлежности преподавателю.
47
Таблица 21 – Экспериментальные данные.
№ |
t1, |
t2, |
t3, |
t4, |
t5, |
tср, |
σ(t), |
Jэксп, |
Jтеор, |
δ, % |
п/п |
c |
c |
c |
c |
c |
c |
с |
кг м2 |
кг м2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7.3. Обработка результатов измерений
7.3.1.Оценить время tср и его погрешность σ(t) в каждом из опытов.
7.3.2.Рассчитать экспериментальные значения момента инерции Jэксп для крестовины с грузами и без грузов (113) и его теоретическое значение Jтеор для крестовины с грузами (114), используя в качестве J0 экспериментальное значение момента инерции крестовины без грузов.
7.3.3.Рассчитать относительное расхождение
δ = |
Jтеор −J1,эксп |
100% |
(115) |
|
Jтеор |
||||
|
|
|
7.3.4.Заполнить таблицу 21.
7.3.5.Сформулировать выводы. Оформить отчет по лабораторной работе.
7.4. Контрольные вопросы
7.4.1.Какова цель данной работы? и в чем заключается основной закон динамики вращательного движения? Объяснить физический смысл величин, входящих в этот закон.
7.4.2.Вывести формулу (108).
7.4.3.Момент инерции, его физический смысл. От чего он зависит? Как рассчитывается?
7.4.4.Вывести формулу (113).
7.4.5.Теорема Штейнера.
48
8. Лабораторная работа 8. Измерение модуля кручения проволоки методом крутильных колебаний
Введение
Модулем кручения проволоки называется коэффициент пропорциональности k между моментом сил вращающих проволоку M и углом α ее поворота
M=-k·α. (116)
Модуль кручения зависит, главным образом, от вида материала, из которого изготовлена проволока, от ее геометрических размеров, температуры и от силы натяжения, растягивающей проволоку.
Целью работы является измерение модуля кручения проволоки методом крутильных колебаний, изучение гармонических колебаний и момента инерции твердого тела относительно оси вращения.
8.1.Краткая теория
Вданной работе используется метод собственных крутильных колебаний твердого тела с моментом инерции J, жёстко закреплённого в рамке крутильного маятника, подвешенной на упругой вертикально натянутой проволоке. Момент инерции самой проволоки считается настолько малым, что им можно пренебречь. При отклонении тела от положения равновесия возникает момент сил упругости, возвращающий тело в исходное положение. Достигнув положения равновесия, тело проходит его, так как обладает в нём максимальной кинетической энергией колебаний
Eкин = |
1 J ωmax2 |
, |
(117) |
|
2 |
|
|
где ω – угловая скорость. После прохождения телом положения равновесия его кинетическая энергия уменьшается, а потенциальная возрастает. Поэтому тело, достигнув положения, соответствующее максимуму потенциальной энергии, останавливается, и тело снова начинает двигаться к положению равновесия, которое проходит опять за счёт кинетической энергии и т. д., то есть тело совершает крутильные колебания.
В моменты наибольшего поворота тела, когда его кинетическая энергия Eкин равна нулю, потенциальная энергия Епот, достигая своего максимума, становится равной полной энергии Е. Таким образом,
E = Eпот = |
1 |
k αmax2 |
, |
(118) |
|
2 |
|||||
|
|
|
|
где k – модуль кручения проволоки, αmax – максимальный угол поворота тела во время его крутильных колебаний.
Из выражения (116) следует, что модуль кручения численно равен моменту силы, закручивающему проволоку на угол α=1 радиан.
Уравнение крутильных колебаний при пренебрежении моментом сил трения, согласно основному закону динамики вращательного движения твердого тела, можно записать
|
M = J |
d2 |
α |
, |
|
|
(119) |
||||
|
dt |
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||
где J – момент инерции тела относительно оси вращения, ε = |
d2 |
α |
– угловое ускорение. |
||||||||
dt |
2 |
||||||||||
С учётом (116) уравнение (119) можно записать в виде |
|
||||||||||
|
|
|
|||||||||
J |
|
d2 |
α |
= −kα. |
|
|
(120) |
||||
|
dt |
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||
Решением этого уравнения является функция |
|
|
|
|
|
||||||
α = αmax cos (ω t + ϕ0 ). |
|
|
(121) |
||||||||
49