

обработка результатов измерений
.pdfТаблица 8 – Результаты измерений длин граней параллелепипеда.
aср, мм |
σслуч(a), мм |
|
|
bср, мм |
σслуч(b), мм |
|
|
cср, мм |
σслуч(c), мм |
|
|
σ(a), мм |
ε(a) |
σ(b), мм |
|
ε(b) |
|
σ(c), мм |
|
ε(c) |
|
|
|
1.3.4.Найти объем тела по формуле (40). Результат занести в таблицу 9.
1.3.5.Найти абсолютную погрешность косвенного измерения (см. п. 3.3 (I))объема тела по формуле
σ(V)= V |
|
σ(a) 2 |
|
σ(b) 2 |
|
σ(c) |
2 |
|
||||||
|
|
|
|
+ |
|
|
|
+ |
|
|
|
. |
(41) |
|
a |
|
b |
|
c |
|
|||||||||
ср |
|
ср |
|
|
ср |
|
|
ср |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
1.3.6.Определить относительную ε(V) погрешность измерения объема. Занести полученные значения в таблицу 9.
1.3.7.Результат измерения объема записать в стандартном виде (21).
Таблица 9 – Измеренное значение объема.
|
|
ε(V) |
Vср, мм3 |
σ(V), мм3 |
|
|
|
|
1.3.8. Сформулировать выводы. Оформить отчет по лабораторной работе. 1.4. Контрольные вопросы
1.4.1.Виды измерений. Виды погрешностей и как с ними бороться?
1.4.2.Как определить систематическую погрешность прибора?
1.4.3.Что такое доверительный интервал? Доверительная вероятность?
1.4.4.Правила округления при измерении физических величин.
1.4.5.Вывести формулу (41)
1.4.6.Для зависимости, заданной преподавателем, вывести выражение абсолютной погрешности результата косвенного измерения.
20
2. Лабораторная работа 2. Изучение зависимости момента инерции тела относительно оси вращения от расстояния до оси вращения
Введение
Метод наименьших квадратов – один из методов теории ошибок для оценки неизвестных величин по результатам измерений, содержащим случайные ошибки. Применяется, также, для приближенного представления заданной функции другими, более простыми функциями и часто оказывается полезным при обработке наблюдений.
Цель работы: Научиться аппроксимировать результаты измерений методом наименьших квадратов. Изучить зависимость момента инерции тел от расстояния до оси вращения на маятнике Обербека.
2.1. Описание экспериментальной установки и методика измерений
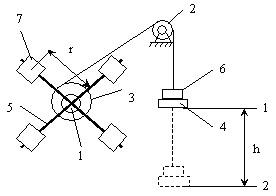
Экспериментальная установка состоит из маятника Обербека 1 (см. рисунок 10), блока 2. На шкив 3 маятника намотана нить, перекинутая через блок 2. К нити прикреплена платформа 4, на которую можно размещать грузы 6. Маятник Обербека представляет собой крестовину 5, имеющую общую ось со шкивом 3. Крестовина и шкивы закреплены между собой жестко. На стержни крестовины надеваются одинаковые грузы 7 массой m. Закрепляя эти грузы в разных местах крестовины, можно изменять момент инерции системы “крестовина-грузы”. Если предоставить свободное движение грузу 6, то маятник придет в движение: груз 6 будет опускаться вниз поступательно, вал с крестовиной и грузами 7 будет вращаться вокруг горизонтальной оси.
Рисунок 10 – Маятник Обербека.
Запишем закон изменения механической энергии для данной механической системы тел для случая, когда груз 6 с платформой из состояния покоя опускается и проходит расстояние h. Изменение механической энергии системы тел равно работе диссипативных сил, в данном случае – сил трения, сопротивления
E2-E1=Атр. |
(42) |
В состоянии покоя 1 груз 6 с платформой обладает потенциальной энергией. В состоянии 2 груз 6 с платформой приобретет кинетическую энергию поступательного движения, а крестовина 5 с грузами 7, шкивом 3 и блоком 2 – кинетическую энергию вращательного движения. Тогда
M v2 |
+ |
Iкр ωкр2 |
+ |
Iбл ωбл2 |
+ |
Iгр ωгр2 |
−М g h = A тр , |
(43) |
|
2 |
2 |
2 |
2 |
||||||
|
|
|
|
|
где M – масса груза 6 с платформой 4, v – их скорость, Iкр – момент инерции крестовины 5 и шкива 3, Iбл – момент инерции блока 2, Iгр – момент инерции грузов 7 относительно их осей вращения, ω – угловая скорость вращения соответствующего тела. Учитывая тот факт, что работа сил трения и кинетическая энергия блока 2 малы по сравнению с другими слагаемыми в уравнении (43), пренебрегаем ими. Учитывая, что угловая скорость ωкр=ωгр=v/Rшк, где Rшк – радиус шкива, получим
21
Iгр + Iкр + M R шк2 |
|
2 M g h R 2 |
|
|||
= |
|
шк |
. |
(44) |
||
v |
2 |
|||||
|
|
|
|
|||
Обозначим сумму в левой части уравнения (44) |
|
|
|
|||
I = Iгр +Iкр +M R шк2 |
|
|
(45) |
|||
и назовем эту величину моментом инерции системы относительно оси вращения. Учтем, что груз 6 движется равноускоренно со скоростью v=2 h/t, где t – его время падения с высоты h. Тогда уравнение (44) примет вид
|
M g R 2 |
|
||
I = |
|
шк |
t 2 . |
(46) |
2 |
|
|||
|
h |
|
||
Таким образом, зная время движения груза с некоторой высоты h, можно определить момент инерции системы относительно оси вращения.
С другой стороны, из выражения (45) видно, что при постоянной массе M груза 6 момент инерции системы зависит только от момента инерции грузов 7 на крестовине. Если считать эти грузы точечными массами, то выражение (45) можно представить в виде
I = I0 + 4 m r2 , |
(47) |
где I0 = Iкр +M R шк2 , m – масса груза 7, r – расстояние от него до оси вращения. Видно, что
момент инерции системы прямо пропорционален квадрату расстояния от грузов на крестовине до оси вращения. График зависимости I=f(r2) должен иметь вид прямой, смещенной относительно начала координат вдоль оси ординат на I0.
Методика проведения лабораторной работы заключается:
1)в экспериментальном определении момента инерции системы по выражению (46) при различном расстоянии грузов 7 до оси их вращения;
2)в построении графика зависимости I=f(r2) по экспериментальным точкам. При этом аппроксимация экспериментальной зависимости проводится методом наименьших квадратов.
Измерение времени движения груза 6 проводится автоматически посредством электронного секундомера. В верхнем и нижнем положении груза установлены световые датчики. Груз закрепляется в верхнем положении электромагнитом. При этом он перегораживает ход лучу света к датчику. Нажатие на кнопку “Пуск” отключает электромагнит, и груз начинает двигаться вниз. На датчик падает свет, и он включает секундомер. Как только груз опустится вниз и перегородит нижнему датчику свет, секундомер отключается. Высота h падения груза измеряется посредством линейки, закрепленной на стойке установки, а расстояние r – по меткам на крестовине. Расстояние между метками соответствует 1 см.
2.2.Порядок проведения измерений
2.2.1.Получить принадлежности у преподавателя. Приборы и принадлежности: установка маятник Обербека и набор грузов, штангенциркуль.
2.2.2.Грузы 7 массой m установить на крестовине на одинаковых расстояниях r от оси вращения. Расстояние r записать в таблицу 10.
2.2.3.Намотать нить на шкив 3 и перекинуть платформу 4 через блок 5. Установить на платформу груз 6 и записать его значение с массой платформы M=mгр+mпл в таблицу 10.
Масса платформы 50,0±1,0 гр. Массы грузов определены с погрешностью 1,0 г. Таблица 10 – Исходные данные.
n |
D, мм |
h, см |
mгр, г |
M, г |
5 |
|
|
|
|
Получить у преподавателя разрешение на проведение измерений.
2.2.4. Включить установку тумблером “Сеть”. Перевести в нажатое состояние кнопку “Пуск”.
22
2.2.5.Нить намотать на один из шкивов так, чтобы нижний край платформы был на уровне верхнего края красного флажка (для установки, снабженной электронным блоком ФМ-1/1) или немногим выше верхнего датчика (для установки FРМ-15), чтобы световой луч не был перекрыт грузом. Отжать кнопку “Пуск” (включится тормозной электромагнит и зафиксирует груз в верхнем положении) и нажать кнопку “Сброс” для перевода миллисекундомера в режим готовности.
2.2.6.Нажать кнопку “Пуск”, и, после перемещения груза в нижнее положение, снять показания секундомера. Результаты измерений занести в таблицу 11.
Таблица 11 – Результаты измерений.
№ |
ri, см |
t, с |
tср, i, с |
ti, с |
Ii, кг м2 |
Ii, кг м2 |
опыта |
|
|
|
|
|
|
1 |
|
t1 |
|
|
|
|
|
|
t2 |
|
|
|
|
|
|
t3 |
|
|
|
|
… |
|
|
|
|
|
|
n |
|
|
|
|
|
|
2.2.7.Повторить п.п. 2.2.5-2.2.6 три раза.
2.2.8.Провести подобные измерения для пяти (n=5) других расстояний r грузов m до оси вращения при неизменной массе M, заполнив таблицу 11.
2.2.9.Выключить установку. Измерить высоту h падения груза посредством линейки, закрепленной на штативе установки, и диаметр шкива D посредством штангенциркуля. Записать результаты в таблицу 10.
2.2.10.Определить систематические погрешности измерительных приборов. Выбрать коэффициент Стьюдента. Сдать принадлежности преподавателю.
2.3. Обработка результатов измерений
2.3.1.Обработать результаты измерения времени (см. раздел 3.2 (I)), заполнив соответствующие столбцы таблицы 11.
2.3.2.Рассчитать моменты инерции системы по формуле (46).
2.3.3. |
Рассчитать погрешности измерения моментов инерции I (см. раздел 3.3 (I)). |
2.3.4. |
Построить зависимость I=f(r2) (см. раздел 5 (I)), указав доверительные интервалы I. |
2.3.5.Аппроксимировать экспериментальную зависимость I=f(r2) прямой линией I=k r2+b методом наименьших квадратов (см. раздел 6.4 (I)). Для этого необходимо оценить коэффициенты уравнения прямой по формулам (36), (37).
2.3.6.Оценить погрешности параметров k и b по формулам (38).
2.3.7.Заполнить таблицу 12.
Таблица 12 – Результаты аппроксимации.
r2 , м2 |
|
|
, кг м2 |
D, м4 |
k, кг |
b, кг м2 |
k, кг |
b, кг м2 |
I |
||||||||
|
|
|
|
|
|
|
|
|
2.3.8. На графике зависимости I=f(r2) провести аппроксимирующую прямую.
2.4.Контрольные вопросы
2.4.1.Момент инерции тела относительно оси вращения. Теорема Штейнера.
2.4.2.Суть метода проверки зависимости момента инерции системы от квадрата расстояния до оси вращения.
2.4.3.Вывод выражения (46) для момента инерции системы.
2.4.4.Метод наименьших квадратов.
2.4.5.Что будет происходить, если грузы на крестовине при движении будут расположены не симметрично?
23
2.4.6.Какую физическую величину характеризует отрезок, отсекаемый прямой на графике зависимости I=f(r2), на оси ординат (величина b).
2.4.7.Какую физическую величину характеризует тангенс угла наклона прямой к оси абсцисс на графике зависимости I=f(r2).
24
3. Лабораторная работа 3. Изучение поступательного движения на машине Атвуда
Введение
На основании опытов Ньютон сформулировал один из основных законов механики (II Закон Ньютона): ускорение, сообщаемое телу силой, прямо пропорционально этой силе и обратно пропорционально массе тела
ar = |
F |
. |
(48) |
|
|||
|
m |
|
|
Целью работы является проверка второго закона Ньютона.
3.1. Описание экспериментальной установки и методика измерений
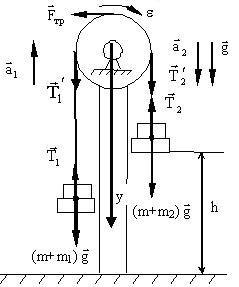
Экспериментальная установка (рисунок 11) смонтирована на базе лабораторного комплекса ЛКМ-2. На стойке укреплен двухступенчатый шкив, вращающийся вокруг горизонтальной оси, через шкив перекинута легкая (условно невесомая) нить с платформами 1 и 2 одинаковой массы m. На платформы могут устанавливаться грузы различных масс m1 и m2 , которые приводят систему “платформы-грузы” в поступательное движение с ускорением а1 ,
аr2 , шкив – во вращение с угловым ускорением ε. Описанное устройство называется машиной Атвуда.
При вращении шкива возникает момент силы трения в оси Mтр. Уравнения движения грузов и шкива, согласно второму закону Ньютона и закону динамики вращательного движения, имеют вид:
(m + m |
|
) gr |
r |
= (m + m |
|
) ar |
|
|
|
+ T |
|
|
|||||
|
|
1 |
r |
r1 |
|
1 |
r1 |
(49) |
(m + m2 ) g + T2 |
= (m + m2 ) a 2 , |
|||||||
J ε = MT′ + MT′ + Mтр |
|
|
|
|||||
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
где T1′, Т1 , T2′, T2 |
– силы натяжения нити; |
|||||||
MT′ , MT′ , Mтр – соответственно, момент сил |
||||||||
1 |
2 |
|
|
|
|
|
|
|
натяжения T1′, T2′ и момент силы трения,
действующей на шкив; J – момент инерции шкива относительно оси вращения.
Рисунок 11 – Схема экспериментальной установки.
Пусть m2 |
> m1. Переходя к проекциям на ось y, направленную вниз, и, учитывая, что |
||||||||||||||||||
a1=a2=a, |
T1′ = Т1; T2′ = T2 |
– |
|
в |
|
силу |
не растяжимости |
и невесомости нити: |
|||||||||||
M |
T |
′ |
= T R; M |
T |
′ |
= T R; |
ε = |
a |
|
(R – радиус шкива), |
|
|
|
||||||
|
|
|
|
|
|||||||||||||||
|
|
1 |
|
|
2 |
|
R |
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||
получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
) g −T = −(m + m |
|
) a, |
|
||||
|
|
|
|
|
|
|
|
(m + m |
1 |
1 |
|
||||||||
|
|
|
|
|
|
|
|
(m + m |
1 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
2 ) g −T2 |
= (m + m2 ) a, |
(50) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
−T1 ) R − Mтр = J R . |
|
|
|
||||||||
|
|
|
|
|
|
|
|
(T2 |
|
|
|
||||||||
Момент инерции шкива относительно оси вращения равен |
J = |
mшк R 2 |
(если считать его |
|
|||
|
2 |
|
|
цилиндрическим телом радиусом R), где mшк – масса шкива. Решая систему уравнений (50)
25
относительно ускорения, получаем
|
(m2 − m1 ) g |
− |
M тр |
|
|
|
|
|
|
|
|
|
||||
a = |
|
|
R |
|
. |
|
|
|
|
|
(51) |
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
2m + m1 + m2 |
+ |
|
mшк |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
2 |
|
|
|
|
|
|
M тр |
|
|||||
Введем новые обозначения: m=m2–m1 – масса перегрузка; |
F |
= |
– эффективная сила |
|||||||||||||
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
тр |
|
|
R |
|
||
|
|
|
|
|
|
|
|
|
|
|
mшк |
|
||||
трения, приведенная к радиусу шкива; M = |
2m + m1 + m2 |
+ |
– |
приведенная масса |
||||||||||||
|
||||||||||||||||
системы. Тогда, уравнение (51) можно представить в виде |
|
|
2 |
|
|
|
||||||||||
|
|
|
|
|
|
|||||||||||
|
a = |
m g − Fтр |
. |
|
|
|
|
|
|
|
(52) |
|||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из выражения (52) видно, что, во-первых, ускорение грузов прямо пропорционально
величине mg–Fтр (при постоянной приведенной массе М) и обратно пропорционально приведенной массе системы (при постоянной величине mg–Fтр), во-вторых. Выражение выведено на основе второго закона Ньютона. Следовательно, проверка соотношения (52) и соответствующих утверждений под ним на реальной установке укажет на достоверность этого закона.
Проверка второго закона сводится к проверке двух утверждений. Соответственно, и, экспериментальная работа разбивается на два задания.
Первое задание. Проверка утверждения: ускорение грузов линейно зависит от величины
mg, (при постоянной приведенной массе, M=const). |
|
|
|||||
Выражение (52) можно записать в виде |
|
Fтр |
|
|
|
||
a = |
1 |
m g − |
. |
(53) |
|||
M |
M |
||||||
|
|
|
|
||||
Если приведенная масса системы M в серии опытов постоянна и сила трения не зависит от скорости движения (что для случая сравнительно небольших скоростей подтверждается
экспериментально), то для каждого значения перегрузка |
m при движении системы будет |
|
наблюдаться ускорение, линейно зависящее от величины |
mg. Тогда, зависимость ускорения |
|
a = f1 ( m g) |
является линейной вида y=k x+b (см. |
(53)), где в качестве углового |
коэффициента прямой выступает величина обратная приведенной массе k = M1 , b = − FMтр ,
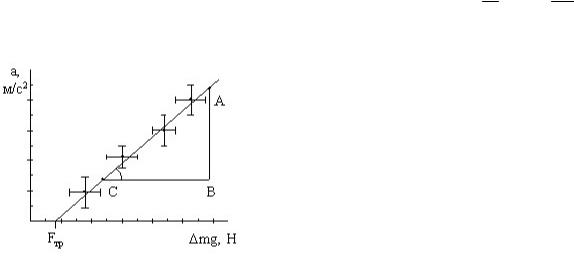
y=a, x= m g. Графиком указанной зависимости a = f1 ( m g) является прямая, не проходящая
через начало координат (рисунок 12).
Таким образом, для выполнения первой серии опытов необходимо проводить измерение ускорения грузов при различных массах перегрузка m=m2–m1, но при постоянной приведенной массе системы M. Для обеспечения неизменности приведенной массы в опытах следует устанавливать на платформы несколько грузов и менять перегрузок перекладыванием грузов с
Рисунок 12 – Зависимость ускорения грузов от силы, одной платформы на другую. вынуждающей систему двигаться.
По угловому коэффициенту прямой можно определить приведенную массу системы
26
k = |
AB |
= |
1 |
. |
(54) |
BC |
|
||||
|
|
M |
|
||
Отрезок, отсекаемый прямой на оси абсцисс, характеризует величину силы трения. Это видно из выражения (53).
Второе задание. Проверка утверждения: ускорение грузов обратно пропорционально
приведенной массе (при постоянной величине |
m g–Fтр=const). |
|
|||
Выражение (52) можно записать в виде |
|
|
1 |
|
|
a = ( m g − F |
|
) |
. |
(55) |
|
|
|
||||
тр |
|
M |
|
||
Если величина mg в серии опытов постоянна, то для каждого значения приведенной массы M при движении системы будет наблюдаться ускорение обратно пропорциональное этой
массе. Тогда, зависимость ускорения от величины обратной приведенной массе |
a = f2 |
|
1 |
|
|
|
|
||
|
||||
|
|
|
M |
|
является линейной вида y=k x (см. (55)), где в качестве углового коэффициента прямой
выступает величина равная k = m g − F , y=a, x = |
1 |
. Графиком указанной зависимости |
|||
|
|||||
|
|
|
тр |
M |
|
|
|
1 |
|
||
a = f2 |
|
|
|
||
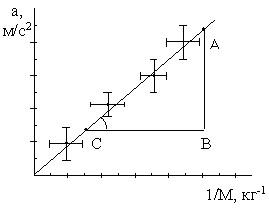
|
|
является прямая, проходящая через начало координат (рисунок 13). |
|||
|
|||||
|
|
M |
|
|
|
По угловому коэффициенту прямой можно определить разность |
|
||
k = |
AB |
= m g − F . |
(56) |
|
|||
|
BC |
тр |
|
|
|
|
|
Если известна величина массы перегрузка, то по значению углового коэффициента можно определить силу трения. Таким образом, для выполнения второй серии опытов необходимо проводить замеры ускорения грузов для различных приведенных масс M при постоянной разности
m g–Fтр.
Для обеспечения неизменности силы в опытах следует устанавливать на одну из платформ груз, равный массе перегрузка m, и при переходе от опыта к опыту добавлять одинаковые массы на платформы.
Лабораторный комплекс содержит измерительную систему ИСМ-5, позволяющую измерять время поворота шкива на определенный угол ϕ.
Из кинематики известно, что при вращательном равноускоренном движении тела из положения покоя угловое ускорение определяется по формуле
|
ε = |
2 ϕ |
. |
|
(57) |
||
|
|
|
|||||
|
|
t 2 |
2 ϕ |
|
|
||
Тогда, ускорение грузов |
a = ε R = |
R |
(58) |
||||
|
|||||||
|
|
|
t 2 |
|
|||
На стойке вместе со шкивом укреплена шкала для измерения углов, а на валу шкива закреплен непрозрачный диск. Этот диск и шкив имеют специальные прорези. Диск находится между двумя диодами (светодиод и фотодиод). В момент, когда прорезь на шкиве совпадает с нулевой отметкой по шкале, прорезь на диске находится между диодами. При повороте шкива свет, испускаемый светодиодом, перекрывается диском и не попадает на фотодиод. Начинается отсчет времени таймером ИСМ-5. Если тумблер “1/ T/2” в положении “1”, таймер измерит время одного оборота шкива (ϕ=2π). Если тумблер в
27
положении “2”, таймер измерит время двух оборотов шкива (ϕ=4π). Расстояние, на которое сместится груз, равно соответственно одной или двум длинам окружности канавки шкива (такое измерение позволяет обойтись без шкалы на стойке и без измерения расстояния линейкой).
3.2. Порядок выполнения работы
3.2.1.Получить принадлежности у преподавателя. Приборы и принадлежности: модель машины Атвуда на базе лабораторного комплекса ЛКМ-2, набор грузов, нить с платформами
иизмерительная система ИСМ-5.
3.2.2.Подготовить к работе прибор ИСМ-5. Выбрать положение тумблера “1/ T/2” и записать соответствующее значение угла ϕ. Тумблер “Однокр” в верхнее положение. Все остальные тумблеры, кроме тумблера “Сеть”, в среднее положение.
3.2.3.На платформах установить по одинаковому набору грузов (рекомендуется m1=m2=0,2;
0,25 кг). Перекинуть нить с грузами через большую ступень шкива (R=25,0±0,5 мм). При этом система должна находиться в равновесии. Записать массу грузов и платформ, а также, радиус шкива R, в таблицу 13. Масса одной платформы m=50,0±1,0 г. Массы грузов определены с погрешностью 1,0 г.
Таблица 13 – Результаты измерений первого задания.
№ |
m, кг |
m g, |
t, с |
tср, c |
σ(t), с |
aср, |
σ(а), |
Доп. данные |
п/п |
|
Н |
|
|
|
м/с2 |
м/ с2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1. … |
|
|
|
|
2m+ m1+m2=… кг |
|
|
|
2. … |
|
|
|
|
R = … м, ϕ= … рад |
|
|
|
3. … |
|
|
|
|
|
|
|
|
|
|
|
|
М=… кг |
|
… |
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
Fтр=… Н |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Получить у преподавателя разрешение на проведение измерений.
3.2.4.Включить установку тумблером “Сеть”.
Первое задание.
3.2.5.Часть грузов на левой платформе переложить на правую, рассчитать массу перегрузка
m.Результат записать в таблицу 13. Рекомендуется перекладывать только грузы массой 10
ги 20 г, так, чтобы масса перегрузка m=m2–m1 была равна 20, 40, 60, 80, 100 г.
3.2.6. Измерить время t поворота шкива (для данного перегрузка) на угол ϕ. Измерение проводится следующим образом. Легкий груз опускают и удерживают прижатым к основанию установки. Поворачивая шкив, устанавливают щель на шкиве на ноль (на панели ИСМ-5 загорается индикатор). При горящем индикаторе нажимают кнопку “Готов” для перевода таймера в режим ожидания. При светящемся же индикаторе отпускают нижний груз (например, левой рукой) и ловят его после первого звукового сигнала этой же рукой, так, чтобы грузы не ударились об основание и не разлетелись. Таймер зафиксирует время t одного (положение тумблера “1”) или двух (положение тумблера “2”) оборотов шкива после начала движения. Опыт провести три раза. Записать показания таймера в таблицу 13.
3.2.7. Повторить пункты 3.2.5-3.2.6 еще для четырех других значений m (масса M системы при этом должна оставаться постоянной). Результаты измерений внести в таблицу 13.
Второе задание.
3.2.8. Установить на правую платформу перегрузок массой m (рекомендуется взять m=10 г). Левая платформа пустая.
3.2.9.Три раза измерить время t поворота шкива на угол ϕ (см. п.3.2.6). Записать результаты
втаблицу 14.
28
Таблица 14 – Результаты измерений второго задания.
№ |
m1+m2, |
M, |
|
1 |
, кг |
-1 |
t, с |
tср, c |
σ(t), |
aср, |
σ(а), |
Доп. данные |
п/п |
кг |
кг |
|
|
|
|
|
с |
м/с2 |
м/с2 |
|
|
M |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1. |
|
|
|
|
|
|
1…. |
|
|
|
|
m=… кг |
|
|
|
|
|
|
|
2…. |
|
|
|
|
mшк = 75,0±1,0 г |
|
|
|
|
|
|
|
3…. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m g–Fтр=… Н |
|
… |
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fтр=… Н |
||
|
|
|
|
|
|
|
|
|
|
|
|
3.2.10. Добавить на каждую платформу по грузу одинаковой массы. Повторить п. 3.2.9. для четырех различных значений приведенной массы M системы при неизменной массе перегрузка m. Результаты измерений и расчетов внести в таблицу 14.
3.2.11. Выключить установку. Определить систематические погрешности приборов и выбрать коэффициент Стьюдента. Сдать принадлежности преподавателю.
3.3. Обработка результатов измерений
3.3.1. Оценить время tср и ускорение aср (58) в каждом из опытов первого задания, погрешность измерения времени σ(t) и погрешность ускорения σ(a)
σ(a)= a |
|
|
σ(R) 2 |
|
2σ(t) 2 |
|
σ(ϕ) |
2 |
|
||
ср |
|
|
+ |
|
|
+ |
|
|
. |
(59) |
|
|
|
||||||||||
|
|
R |
|
|
|
|
ϕ |
|
|
|
|
|
|
|
tср |
|
|
|
|
||||
Заполнить таблицу 13.
3.3.2. Построить график зависимости a = f1 ( m g) (пример на рисунке 12). Определить по
графику приведенную массу M системы (54). Снять с графика значение силы трения Fтр. Записать данные в таблицу 13.
3.3.3. Выполнить п. 3.3.1. для второго задания. Заполнить таблицу 14.
3.3.4. Построить график зависимости a = f2 1 (пример на рисунке 13). Определить из
M
графика значение силы трения (формула (56)).
3.3.5. Сформулировать выводы. Оформить отчет по лабораторной работе. 3.4. Контрольные вопросы
3.4.1.Какова цель данной работы? В чем заключается сущность метода проверки II закона Ньютона для данной системы?
3.4.2.Дать определения понятий: система отсчета, радиус-вектор, траектория, перемещение, путь, скорость, ускорение, тангенциальное и нормальное ускорение.
3.4.3.Указать физический смысл величин: масса, импульс, сила.
3.4.4.Сформулировать и указать физический смысл I, II, III законов Ньютона.
3.4.5.От чего зависят угловые коэффициенты прямых на рисунках 12, 13? И почему?
3.4.6.Что характеризует отрезок, отсекаемый прямой на оси абсцисс? И почему?
3.4.7.Вывести формулу (51).
29