

Mec-lab-2006
.pdfЦентр масс двух маятников с добавочным грузом находится от оси вращения на расстоянии
l |
12Г |
= m1l1 + m2l2 + mГlГ . |
||||
|
|
m1 |
+ m2 |
+ mГ |
|
|
|
|
|
||||
Если добавочный груз отсутствует, то это расстояние
l12 = m1l1 + m2l2 . m1 + m2
Угол отклонения маятника от положения равновесия определяется по шкале Ш. В положении равновесия маятники располагаются так, чтобы их визиры находи- лись против нулевой отметки шкалы Ш. Это достигается с помощью винтов В в основании установки.
Если отклонить один из маятников, и закрепить в отклоненном положении, а второй отклонить и отпустить, то он будет совершать колебательное движение около положения равновесия.
Если же один из маятников отклонить из положения равновесия на угол α (второй при этом оставить в положении равновесия) и отпустить, то после столк- новения маятников они начнут двигаться как одно целое и отклонятся от положе- ния равновесия на угол β.
Описание метода измерений
Два физических маятника, имеющие общую горизонтальную ось вращения
образуют замкнутую систему в момент прохождения ими положения равновесия (в этом положении моменты сил тяжести равны нулю, а других моментов относи- тельно оси вращения просто нет). Следовательно, при прохождении положения равновесия для этой системы выполняется закон сохранения момента импульса:
I1ω1 + I2ω2 = I1ω1′ + I2ω2′ ,
где I1 и I2 – моменты инерции маятников относительно оси вращения;
ω1 и ω2 – их угловые скорости в положении равновесия до их соударения;
ω1′ и ω2′ – их угловые скорости после взаимодействия.
До взаимодействия второй маятник покоится (ω2 |
= 0), а после взаимодейст- |
|||||
|
|
|
|
′ |
′ |
|
вия оба маятника движутся как единое целое (ω1 |
=ω2 =ω ) и поэтому закон сохра- |
|||||
нения момента импульса в проекции на ось вращения принимает вид: |
||||||
I1ω1 = ( I1 + I2 )ω . |
(1) |
|||||
Моменты инерции маятников можно найти, зная их периоды колебаний |
||||||
T = 2π |
|
I |
|
, |
|
|
 mgl
mgl
где l – расстояние от оси вращения до центра масс маятника. 51
Таким образом, момент инерции маятника 1 |
|
|||||||||||||||||||||||
|
m gl T 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
I1 = |
|
1 |
1 1 |
|
(без добавочного груза); |
|
||||||||||||||||||
|
4π 2 |
(2)* |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||
|
|
( m |
+ m |
|
)gl |
|
Т |
|
|
|
|
|
|
|
|
|||||||||
|
|
Г |
|
|
|
|
|
|
|
|
|
|
||||||||||||
I1Г = |
|
1 |
|
|
|
|
1Г |
|
|
|
1Г |
|
|
(с грузом), |
|
|||||||||
|
|
|
4π 2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
момент инерции системы из двух маятников |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
( m |
1 |
+ m |
2 |
)gl Т 2 |
|
|
|
|||||||||
|
|
|
I12 = |
|
|
|
|
|
|
|
|
|
12 12 |
|
(без груза); |
|
||||||||
|
|
|
|
|
|
|
|
|
|
4π 2 |
|
|
(3)* |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т 2 |
|||||||
|
|
|
|
|
( m |
|
|
+ m |
|
|
+ m |
|
)gl |
|||||||||||
|
|
|
|
|
1 |
2 |
Г |
|
||||||||||||||||
|
|
I12Г = |
|
|
|
|
|
|
|
|
|
|
12Г |
12Г |
(с грузом), |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
4π 2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где l12 , l12Г − расстояние от оси до центра масс системы из двух маятников без дополнительного груза и с грузом;
Т12 , Т12 Г – период колебания системы из двух маятников (без груза
ис грузом).
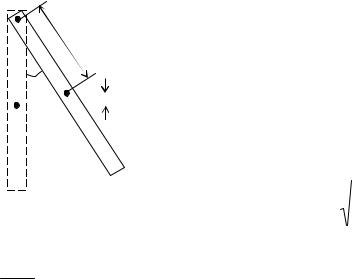
При отклонении маятника от положения равновесия на угол α центр масс
его поднимется на высоту (рис. 2) h = l (1 − cosα ). |
|
|
|
|
|
||||||
|
|
|
|
Так как до взаимодействия и после взаимодейст- |
|||||||
|
|
l |
вия на маятник действует только сила тяжести (консер- |
||||||||
|
|
вативная), а момент силы сопротивления достаточно |
|||||||||
|
|
|
|
||||||||
|
α |
мал, из закона сохранения механической энергии |
|||||||||
|
|
|
h |
|
|
mgh = |
|
Iω 2 |
|||
|
|
|
|
|
|
||||||
ц.м. |
|
|
|
|
|
|
|||||
|
|
|
2 |
|
|
|
|||||
|
|
|
|
можно найти угловую скорость маятника в момент |
|||||||
|
|
|
|
прохождения положения равновесия: |
|||||||
|
Рис. 2 |
ω = |
|
2mg l (1 − cosα ) |
|
, |
|||||
|
|||||||||||
|
|
|
|
|
|
|
I |
||||
где Iω2 2 – энергия колеблющегося маятника при прохождении положения
равновесия,
mgh – энергия маятника, отклоненного на угол α (при этом его центр масс
поднят на высоту h).
В наших опытах первоначально маятник 1 отклоняется от положения равно- весия на угол α и, следовательно, его угловая скорость при прохождении поло- жения равновесия (т.е. перед взаимодействием (столкновением) с маятником В)):
52

ω1 = |
|
2m1gl1(1 − cosα ) |
|
|
(без добавочного груза); |
|||
|
|
|
I1 |
|
||||
|
|
|
|
|
|
(4)* |
||
ω1Г |
= |
|
2( m1 + mГ )gl1 |
Г |
(1 − cosα ) |
(с грузом). |
||
|
I1Г |
|
|
|||||
|
|
|
|
|
|
|
||
После столкновения система из двух маятников отклоняется на угол β, и сле- довательно, их начальная угловая скорость в положении равновесия:
ω12 = |
|
2( m1 + m2 |
)gl12(1 − cos β ) |
(без добавочного гру- |
|||||
|
|
|
|
I12 |
|
||||
|
|
|
|
|
|
|
|
(5)* |
|
ω12Г = |
|
|
2( m1 + m2 |
+ mГ )gl12Г |
(1 − cos β ) |
||||
|
|
(с грузом). |
|||||||
|
|
|
|
I12Г |
|
|
|||
|
|
|
|
|
|
|
|
|
|
Выполнение работы
1.С помощью винтов В (рис. 1) установить маятники в свободном положе- нии на нулевую отметку шкалы.
2.Измерить расстояние l1, l2 и lГ и записать их значение в табл. 1. Записать также значения m1, m2 и mГ.
3.Рассчитать расстояние от оси вращения до центра масс маятников l1Г, l12 и
l12Г.
4.Отвести в сторону маятник 2, закрепить его. Определить время десяти ко-
лебаний t1 маятника 1 и время 10 колебаний маятника 1 с добавочным грузом t1Г. Определить время 10 колебаний системы, состоящей из двух маятников, без до- полнительного груза t12 и с грузом t12Г. Полученные значения занести в табл. 1.
5.Рассчитать периоды колебаний Т1, Т1Г, Т12, Т12Г и моменты инерции маят-
ников I1, I1Г, I12, I12Г.
6. Отклонить маятник 1 (без груза) на угол α1 (по указанию преподавателя) и записать его значение в табл. 1. Маятник 2 при этом находится в положении рав- новесия. Опустить маятник 1 и отметить угол β, на который отклонится система из двух маятников после взаимодействия. Опыт повторить не менее 5 раз и рас- считать среднее значение угла  β
β  .
.
7.Повторить опыт (п. 6), прикрепив к маятнику 1 добавочный груз Г.
8.Рассчитать угловые скорости маятников до взаимодействия ω1 и после
ω12 , ω1Г и ω12Г .
53
|
|
|
|
|
|
Величина |
Таблица 1 |
|
Опытные данные |
|
|
Значение |
|||
|
|
|
Расстояние до центра масс |
||||
|
|
1 |
|
|
|
2 |
3 |
|
m1= |
|
|
, |
|
системы . . . . . . . . . . . . . . . . . . . |
|
|
|
|
|
|
|
||
|
m2= |
|
|
, |
|
l1Г = |
|
|
mГ= |
|
|
, |
|
системы . . . . . . . . . . . . . . . . . . . |
|
|
l1= |
|
|
, |
|
l12 = |
|
|
|
|
|
|
|
||
|
l2= |
|
|
, |
|
системы . . . . . . . . . . . . . . . . . . . |
|
|
|
|
|
l12Г = |
|
||
|
lГ= |
|
|
, |
|
|
|
N=10 |
t1= |
c |
T1= |
|
c |
Момент инерции |
|
t1Г= c |
T1Г= c |
I1 = |
|
||||
t12= |
c |
T12= |
|
c |
|
|
|
|
t12Г= c T12Г= |
c |
системы . . . . . . . . . . . . . . . . . . . |
|
|||
Без груза |
α1 = |
, |
|
I1Г = |
|
||
№ |
|
|
β1, |
|
|
системы . . . . . . . . . . . . . . . . . . . |
|
|
|
|
|
|
I12 = |
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
системы . . . . . . . . . . . . . . . . . . . |
|
4 |
|
|
|
|
|
I12Г = |
|
5 |
|
|
|
|
|
|
|
Среднее |
|
|
|
|
Угловая скорость |
|
|
С грузом α2 = |
, |
|
|
|
|||
№ |
|
|
β2, |
|
|
системы . . . . . . . . . . . . . . . . . . . |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
ω1Г = |
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
системы . . . . . . . . . . . . . . . . . . . |
|
4 |
|
|
|
|
|
ω12 = |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
54 |
|

1 |
2 |
|
3 |
||||
Среднее |
|
системы . . . . . . . . . . . . . . . . . . . |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проверьте: все ли |
ω12Г = |
|
|
|
|
||
обведенные графы |
|
|
|
|
|||
заполнены |
|
|
|
|
|
|
|
Обработка результатов
1. Рассчитать моменты импульсов и энергию маятников в первом и во втором опытах. Результаты занести в табл. 2.
|
|
|
|
|
Таблица 2 |
|
Моменты импульсов |
Отклонение |
|||
|
|
|
|||
Без груза |
I1ω1 |
I12ω12 |
|
|
|
|
Абсолютное |
Относительное γ |
|||
|
|
|
|
||
|
|
|
|
|
|
Гω1Г I12Гω12Г γ
Сгрузом
2.Рассчитать энергию маятников до и после взаимодействия. Рассчитать ко-
эффициент восстановления кинетической энергии Отклонение
k= Еконеч
Енач
для первого и второго случаев и результаты занести в табл. 3.
Таблица 3
|
Енач |
Еконеч |
|
k1 |
Без груза |
0,5 I1ω12 |
0,5 I12ω122 |
|
|
|
|
|||
|
|
|
|
|
С грузом |
0,5 I1Гω12Г |
0,5 I12Гω122 |
Г |
k2 |
|
|
|
|
|
|
|
|
|
|
3. Оценить погрешности измерений.
В качестве систематической погрешности в данных опытах следует взять приборную погрешность, равную половине цены деления измерительного прибо- ра.
Случайная погрешность определяется по разбросу выборки: 55

δх = (хmax − xmin ),
2
где хmax и хmin – максимальное и минимальное значения измеряемой величины в серии из n повторных измерений. Этой границе доверительного интервала соот-
ветствует доверительная вероятность
= - æ 1 ön−1 P 1 ç ÷ .
è 2 ø
3.1.В табл. 4 занести средние значения прямых измерений, выполненных в одном из упражнений и значения погрешностей этих величин – систематической
ислучайной.
3.2.Для каждой величины выбрать наибольшую из погрешностей и рассчи-
тать наибольшую относительную погрешность γ измерения каждой величины. Таблица 4
|
Измеряемая |
Абсолютная |
Относительная |
|||
|
величина |
погрешность |
погрешность δ |
|||
|
|
|
|
|
||
обозначение |
среднее |
систематич. θ |
cлучайная δ |
|||
|
||||||
|
|
значение |
|
|
|
|
l1 |
м |
|
|
–– |
|
|
l2 |
м |
|
|
–– |
|
|
lГ |
м |
|
|
–– |
|
|
t1 |
с |
|
|
–– |
|
|
t12 |
с |
|
|
–– |
|
|
t1Г |
с |
|
|
–– |
|
|
t12Г |
с |
|
|
–– |
|
|
α1 |
|
|
|
–– |
|
|
α2 |
|
|
|
–– |
|
|
β1 |
|
|
|
|
|
|
β2 |
|
|
|
|
|
|
3.3. Погрешность измерения величины момента импульса и энергии в первом приближении можно считать равной (во всяком случае не выше) относительной погрешности менее точно измеренной величины (в табл.4). С учетом этого сде-
лать вывод о выполнении законов сохранения импульса и энергии в проведенных опытах.
56
РАБОТА № 9
ИЗУЧЕНИЕ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ
Цель работы: изучить зависимость амплитуды вынужденных колебаний от частоты внешней силы, явление резонанса. Определить коэффициент затухания собственных колебаний.
Оборудование: маятник, звуковой генератор.
Описание метода
Если маятник вывести из положения равновесия и отпустить, то он будет со- вершать колебания. Собственные колебания всегда являются затухающими. Что- бы колебания маятника стали незатухающими, необходимо пополнять энергию колебаний. Одним из способов является воздействие внешней периодической си- лой F = F0 cosω t, под действием которой маятник начинает совершать вынуж- денные колебания. Тогда уравнение движения, второй закон Ньютона, с учетом действия внутренних сил упругости Fупр = – k x и силы сопротивления, которую
= −r dxdt , примет вид
|
m |
d 2 x |
= −kx − r |
dx |
+ Fo cosω t |
(1) |
||||||
|
dt 2 |
dt |
||||||||||
или |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
|
d 2 x |
|
|
dx |
+ ωo2 |
|
|
F |
|
|||
|
|
|
+ |
2β |
|
х = |
o |
cosω t , |
(2) |
|||
|
dt 2 |
dt |
|
|||||||||
|
|
|
|
|
|
|
m |
|
||||
где β = 2rm — коэффициент затухания собственных колебаний, ωo = 
 mk —
mk —
циклическая частота свободных колебаний.
Как показывает опыт, вначале, после приложения внешней периодической си- лы, маятник совершает сложное движение, которое является суперпозицией соб- ственных и вынужденных колебаний. Со временем собственные колебания зату- хают, и маятник будет совершать только вынужденные колебания с частотой внешней силы. То есть решение уравнения (2) следует искать в виде гармониче-
ской функции
x = A cos(ω t − ϕ ). |
(3) |
Подстановкой можно убедиться, что функция (3) будет решением, если ам-
плитуда вынужденных колебаний зависит от частоты внешней силы по закону: |
|
||||
A = |
|
Fo |
|
, |
(4) |
m |
|
|
|||
(ωo2 − ω 2 )2 + 4β 2ω 2 |
|||||
57 |
|
|
|
||

т.е. зависит от соотношения между частотами ω и ω0, а также от коэффициента затухания β.
График зависимости амплитуды вынужденных колебаний от частоты внешней силы представлен на рис. (1). Как видно, при некоторой частоте амплитуда коле- баний сильно возрастает, достигая максимума тем более высокого, чем меньше сила сопротивления. Максимум амплитуды соответствует частоте
ω рез = 
 ωо2 − 2β 2 . Это явление называют резонансом. Амплитуда колебаний при резонансе, если подставить в (4) ω рез ≈ ωо :
ωо2 − 2β 2 . Это явление называют резонансом. Амплитуда колебаний при резонансе, если подставить в (4) ω рез ≈ ωо :
Арез = |
Fo |
(5) |
|
2mβω |
|||
|
|
и тем больше, чем меньше коэффициент затухания β0.
При малой частоте внешней силы амплитуда колебаний уменьшается и стре-
мится к смещению маятника из положения равновесия под действием постоянной силы:
= Fko .
Форма резонансной кривой зависит от величины коэффициента затухания: резо- нансная кривая тем уже, чем меньше ко- эффициент затухания. Если обозначить частоты, при которых амплитуды колеба-
ний в |
2 |
раз меньше резонансной ω1 и ω2 |
|
||||||||
(рис.1) и решить совместно уравнения (4) |
|
||||||||||
и (5), то можно получить формулу для |
|
||||||||||
определения коэффициента затухания по |
|
||||||||||
ширине резонансной кривой |
|
||||||||||
|
F0 |
|
|
|
|
= |
|
F0 |
Рис. 1 |
||
|
2mβω |
|
|
|
|
m |
|
|
|
||
|
|
2 |
|
(ω 2 − ω 2 )2 + 4β 2ω 2 |
|||||||
|
|
|
|
|
0 |
|
|
|
|||
или
(ω02 − ω 2 )= 4β 2ω 2 .
Это биквадратное уравнение эквивалентно двум квадратным уравнениям:
ω 2 |
− ω 2 = 2βω и ω 2 |
− ω 2 |
= −2βω . |
0 |
0 |
|
|
Решая их, находим:
ω1 = −β ± 
 β 2 + ω02 ,
β 2 + ω02 ,
ω2 = β ± 
 β 2 + ω02 .
β 2 + ω02 .
Тогда
58
β = |
ω2 − ω1 . |
(6)* |
|
2 |
|
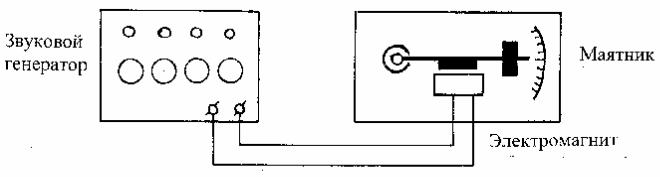
Описание установки
Установка состоит из маятника и звукового генератора. Маятник представля- ет собой грузик, закрепленный на упругой стальной пластинке (рис. 2). Внешняя периодическая сила создается при взаимодействии постоянного магнита на пла- стинке с электромагнитом, по которому протекает переменный ток от звукового генератора. Частота колебаний определяется по индикаторам генератора и уста- навливается поворотом переключателей. Амплитуду колебаний определяют по шкале.
Выполнение работы
1. Отвести маятник от положения равновесия и отпустить. Маятник начнет совершать колебания. Оценить порядок частоты собственных колебаний. Для ис- пользуемых установок — это несколько колебаний в секунду.
2.Включить звуковой генератор. С помощью переключателя диапазонов “х1“
ипереключателей частоты установить небольшую частоту, меньше частоты соб- ственных колебаний. После установления вынужденных колебаний измерить ам- плитуду колебаний.
Повторить опыт 8–10 раз, изменяя частоту от наименьшей до частоты в 2–3 раза выше частоты собственных колебаний через 1…2 Гц.
3.Оценить по измерениям диапазон частот вблизи резонанса и повторить не менее 5 раз измерения амплитуды при изменении частоты генератора в этом диа- пазоне через 0,1 Гц.
Оценить систематическую погрешность установки частоты и измерения ам- плитуды. Результаты измерений записать в таблицу. Форма отчета приведена в приложении.
Рис. 2
59
Таблица
n
Обработка результатов
1. Построить график зависимости амплитуды колебаний от частоты генера- тора (см. с.11).
2. Определить частоты n1 и n2 (рис. 1), при которых амплитуды колебаний меньше максимальной в 
 2 раз.
2 раз.
3.Определить коэффициент затухания. При w = 2pn формула (6) примет вид
áβ эксп ñ = π (ν 2 -ν 1 ).
4.Оценить систематическую погрешность измерения коэффициента затухания
θβ = 2θν .
5. Измерить по графику значение резонансной частоты колебательной систе-
мы wрез.
6. Поскольку точность измерения wрез определяется графиком, то принять q wрез равной цене малого деления на графике (цена 1 мм на графике).
7. Записать результат: b = ábэкспñ ± qb, wрез = wрез эксп ± q wрез. 8. Сделать выводы.
60