

Mec-lab-2006
.pdfЗадание 2. Изучение зависимости момента инерции от распределения массы относительно оси вращения
В этом задании используется тело в виде крестовины, по которой могут пе- ремещаться грузы – цилиндры. Все результаты измерений занести в табл. 3.
1. Определить массу т тела и радиус r оси тела, и записать постоянную уста-
новки (α1 + α2).
2. Установить подвижные цилиндры на минимальном расстоянии b от оси вращения и измерить это расстояние.
|
2b |
Примечания. |
|
|
1. Когда грузы находятся на одинако- |
||
|
r |
|
вом расстоянии от оси вращения, тело |
|
|
должно находиться в безразличном по- |
|
|
|
||
|
|
|
ложении равновесия на горизонтальных |
|
|
|
направляющих. |
|
|
2b |
|
|
|
2. Так как цилиндры имеют одинако- |
|
|
|
2b |
|
|
|
вый размер, расстояние между центрами |
|
грузов равно расстоянию между их тор- цами, которое можно измерить значи- тельно точнее (рис. 2).
Рис. 2
|
|
|
|
|
|
|
|
|
Таблица 3 |
№ |
b, м |
t, c |
b2, м2 |
l, м |
× 2 |
α |
α |
= |
рад |
|
|
|
|
|
I, кг м |
|
1 + 2 |
||
1 |
|
|
|
|
|
m = |
|
кг |
|
|
|
|
|
|
|
m0 = 0,135 |
кг |
||
… |
|
|
|
|
|
|
r = |
|
м |
5 |
|
|
|
|
|
|
l0 = 0,51 |
м |
|
|
|
|
|
|
|
|
|
|
|
3.Установить тело на направляющие на расстоянии l0 от нижней точки, при- жав его к упорам. Положение тела фиксируется магнитом нажатием кнопки элек- тромагнита.
4.Нажать кнопку секундомера «Пуск». При этом электромагнит отключится
итело начнет двигаться. Когда тело достигнет нижней точки, секундомер автома- тически выключится. Записать время движения тела до нижней точки в табл. 3.
5.Отметить расстояние l, на которое продвинется тело, поднимаясь по инер-
ции.
6.Повторить измерения п.п. 3–5 при других расстояниях b цилиндров, отно- сительно оси вращения.
7.Рассчитать b2 и момент инерции тела I (формула 4) для каждого опыта.
8.Построить график зависимости (см. стр. 11) I = f(b2).
41

9.Экстраполируя график I = f(b2) на ось ординат, определить момент инер- ции крестовины Iкр.
10.Выбрать на концах экспериментальной прямой две точки 1 и 2 и рассчи- тать среднее значение углового коэффициента, т.е. массу грузов.
2m |
0эксп |
= |
I2 − I1 |
. |
(9)* |
|
|
||||||
|
|
b2 |
− b2 |
|
||
|
|
|
2 |
1 |
|
|
11. Оценить суммарную относительную погрешность, которая характеризует
точность выполнения теоремы Штейнера
γ = m0 − m0эксп . (10)* m0
12. Рассчитать теоретическое значение момента инерции крестовины относи- тельно оси симметрии и относительно МОВ аналогично п. 8 задания 1.
Момент инерции стержня при вращении вокруг оси, проходящей через сере- дину стержня, перпендикулярно его оси, рассчитывается по формуле
I = |
1 |
ml 2 . |
(11)* |
|
12 |
||||
|
|
|
13. Сделать выводы.
42
РАБОТА № 6
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ МАХОВИКА
Цель: определить момент инерции маховика, проверить теорему Штейнера.
Оборудование: специальная установка, набор гирь, штангенциркуль, секун-
домер
|
5 |
Описание установки |
|
|
|
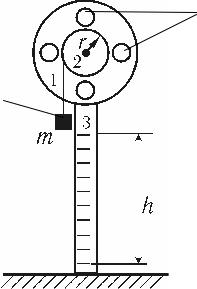
Диск 1 с резьбовыми отверстиями насажен на ось |
|
4 |
(рис. 1) и может вращаться с малым трением. На той же |
||
оси находится шкив 2 радиусом r, на который наматыва- |
|||
|
|||
|
ется нить. К другому концу нити привязан груз 4 массой |
||
|
m, под действием которого система приводится во вра- |
||
|
щение. Путь, пройденный грузом до своего нижнего по- |
||
|
ложения (когда нить полностью размотается), определя- |
||
|
ется по шкале 3, вдоль которой груз движется. |
||
|
|
В резьбовые отверстия диска могут вворачиваться |
|
|
дополнительные грузы 5 цилиндрической формы (радиу- |
||
|
са R) и массы т0. |
||
|
Рис. 1 |
В установке предусмотрено автоматическое измере- |
|
|
ние времени движения груза до нижней точки и расстоя- |
||
ния h, на которое поднимается груз по инерции после прохождения нижнего по- ложения.
Описание метода измерений
Если намотать нить на шкив, подняв на высоту h0 груз m, то он будет обла- дать потенциальной энергией W0=mgh0. При падении груза его потенциальная
энергия переходит в кинетическую энергию поступательного движения груза
mυ 2 / 2 и энергию вращения диска Ιω2/2. Зная время t падения груза до нижней точки, можно определить конечную скорость движения груза υ = 2h0 / t и угло-
вую скорость вращения диска ω = υ / r = 2h0 / (r t), где r – радиус шкива.
При движении в подшипниках действует момент сил трения Мтр, для пре-
одоления которого на пути h0 = ϕ0 r совершается работа |
|
|||||
А = М ϕ |
|
= М |
|
h0 |
, |
(1) |
|
|
|
||||
тр |
0 |
|
тр |
r |
|
|
где ϕ0 – угол поворота диска (угловое перемещение). |
|
|||||
Работа сил трения равна изменению механической энергии системы |
|
|||||
А = W0 – W. |
|
|
(2) |
|||
|
43 |
|
|
|
|
|
В соответствии с законом сохранения энергии и равенством (2)
|
mυ 2 |
|
Iω 2 |
|
|
h |
|
|
mgh = |
|
+ |
|
+ М |
|
0 |
. |
(3) |
2 |
2 |
|
|
|||||
0 |
|
|
тр |
r |
|
|||
Момент сил трения Мтр находится из следующих соображений. После того, как груз опустится до нижней точки, маховик, продолжая вращение по инерции, поднимет груз на высоту h; там его потенциальная энергия mgh меньше, чем на-
чальная, на величину работы, совершенной против сил трения на |
всём пути |
||
(h0 + h) = ϕ r. Из закона сохранения энергии и формулы (2) следует |
|
||
Мтр |
h0 + h |
= mgh0 - mgh . |
(4) |
|
|||
|
r |
|
|
Решая совместно уравнения (3) и (4), получим расчётную формулу для момен-
та инерции вращающегося тела: |
|
|
ght2 |
|
|
|
|
I = mr2 |
é |
|
- 1ù . |
(5)* |
|||
êh |
(h + h) |
||||||
|
ú |
|
|||||
|
ë |
0 |
0 |
|
û |
|
|
Задание 1. Определение момента инерции диска
1.Снять дополнительные грузы с диска.
2.Измерить штангенциркулем диаметр шкива d в нескольких местах, запи-
сывая результаты в табл. 1, и определить среднее значение ádñ. |
|
|
Таблица 1 |
|||||
|
d, м |
t, с |
h, м |
|
|
|
||
№ п.п. |
r = d |
/ 2 = |
м |
|
||||
1 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
… |
|
|
|
m = |
|
|
кг, |
|
5 |
|
|
|
h0 = |
|
м |
|
|
|
|
|
|
|
|
|||
Среднее значение |
|
|
|
Ι |
д = |
|
× |
2 |
|
|
|
|
|
|
кг м |
|
|
3.Вращая диск, намотать нить в один слой на шкив и включить электромаг- нит красной кнопкой, расположенной в верхней части установки. Измерить и за- писать расстояние h0 от груза до нулевой отметки шкалы.
4.Определить массу груза m, подвешенного к нити, включить секундомер.
5.В момент прохождения грузом нижнего положения секундомер выключа- ется. Продолжая дальше наблюдение за движением груза m, заметить высоту h, на которую поднимется груз, двигаясь по инерции. Показание секундомера t и высоту h записать в табл. 1.
6.Повторить измерения еще четыре раза при тех же значениях m и h0.
7.Вычислить среднее значение момента инерции диска Ιд по формуле (5).
44
Задание 2. Проверка теоремы Штейнера
1. Определить массу т0 и радиус R дополнительных грузов. Закрепить их на одинаковом расстоянии от оси вращения на диске установки и замерить расстоя- ние l1 от оси вращения до центра грузов. Результаты этих измерений и число до- полнительных грузов k занести в табл. 2.
|
|
|
|
|
|
|
|
Таблица 2 |
m0= |
кг |
№ |
l1 = |
м l2 = |
м l3 = |
м l4 = |
м |
|
k = |
|
п.п. |
|
|
|
|
|
|
|
t, с |
h, м t, с |
h, м t, с |
h, м t, с |
|
h, м |
||
R= |
м |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||
r= |
м |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||
h0= |
м |
3 |
|
|
|
|
|
|
Iд= |
кг м2 |
4 |
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Среднее |
|
|
|
|
|
|
|
|
Iэксп |
|
|
|
|
|
|
|
IГ = 12 m0 R2 + m0 l2
Iрасч = I Д + k IГ
2.Занести в табл. 2 результаты измерений, полученных в задании 1: радиус
шкива r, массу груза т, расстояние, проходимое грузом до нулевой отметки h0, момент инерции диска Iд и число дополнительных грузов k.
3.Провести измерения (см. п.п. 2–6 задания 1) и результаты занести в табл. 2.
4.Рассчитать момент инерции Iэксп диска с дополнительными грузами
(формула 5).
5. Рассчитать момент инерции дополнительных грузов IГ, используя теорему Штейнера IГ = ( 0,5m0R2 + m0l 2 )k и результат занести в табл. 2.
6. Рассчитать момент инерции системы «диск–дополнительные грузы»
I расч = Iд + kIГ .
7.Провести подобные измерения и расчеты с другим положением дополни- тельных грузов на диске (п.п. 3–6 задания 1).
8.Сравнить полученное экспериментально значение момента инерции Iэксп и расчетное значение момента инерции системы Iрасч и сделать выводы.
45

Задание 3. Оценка погрешности измерений
1. Оценить случайные погрешности измеряемых величин по разбросу полу- ченных значений (δх = ( хmax − xmin ) / 2 ) и приборные (систематические) по-
грешности всех измерений. Результаты занести в табл. 3.
|
|
|
|
|
Таблица 3 |
Измеряемая величина |
|
Погрешность |
|
||
системат. θ |
случайная δ |
|
наибольшая |
||
|
|
|
|||
|
|
|
относительная γ |
||
Название |
средн. |
||||
значение |
|
|
|
|
|
|
|
|
|
|
|
Масса груза т |
кг |
|
–– |
|
|
|
|
|
|
|
|
Высота ho |
м |
|
–– |
|
|
|
|
|
|
|
|
Высота h |
м |
|
|
|
|
|
|
|
|
|
|
Время t |
с |
|
|
|
|
|
|
|
|
|
|
Радиус r |
мм |
|
|
|
|
|
|
|
|
|
|
Масса m0 |
г |
|
–– |
|
|
Радиус R |
м |
|
–– |
|
|
|
|
|
|
|
|
Расстояние l |
м |
|
–– |
|
|
|
|
|
|
|
|
2. Относительную погрешность полученного результата γ I принять равной
погрешности той величины, которая измерена менее точно и рассчитать абсолют-
ную погрешность величины момента инерции
I = γ I  I
I  .
.
Записать результат в виде:
I = I ± I , |
P = 1 − ( 0,5 )n−1 . |
3. Сравнить расчетные значения момента инерции и полученные экспери- ментально и сделать выводы.
46
КОЛЕБАНИЯ И ВОЛНЫ
РАБОТА № 7
ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ
Цель: ознакомиться с закономерностями колебаний физического маятника, определить ускорение свободного падения.
Оборудование: оборотный (физический) маятник, секундомер.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Описание установки |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
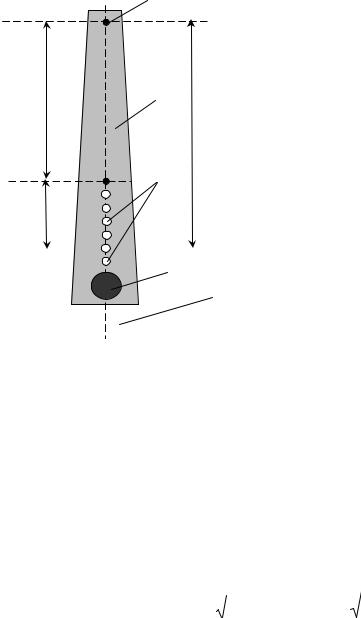
Физический маятник – любое те- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ло, имеющее ось вращения не про- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ходящую через центр его масс. В |
||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
нашем случае это стальная полоса 1 |
||||
|
|
|
l1 |
|
|
|
|
|
|
|
|
переменного сечения, на протяже- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
нии которой имеется несколько от- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
верстий для крепления маятника на |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
оси вращения. На одном конце по- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
лосы имеется отверстие 2, а на дру- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
гом ряд отверстий 3, расположенных |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
на равном расстоянии друг от друга. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
4 |
|
|
|
|
Это позволяет получать физический |
|||||||||
|
|
|
|
|
|
|
|
|
маятник с |
различными |
периодами |
|||||||||
|
|
|
|
|
|
5 |
колебаний. |
Изменить |
положение |
|||||||||||
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
центра масс маятника можно с по- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мощью дополнительного груза 4. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1
Описание метода
В большинстве методов измерения ускорения свободного падения g исполь- зуется зависимость периода T колебаний маятника от величины g, так как период колебаний можно измерить с высокой точностью.
Оборотный маятник является физическим, и период его колебаний
|
|
= 2π |
|
, |
|
T = 2π |
|
(Ic + mIc2 )/ mgIc |
(1) |
||
I / mg Ic |
|||||
47 |
|
|
|
||
где Ι – момент инерции маятника относительно точки подвеса, Ιс – момент инерции относительно центра масс,
m – масса маятника,
lc – расстояние от центра масс маятника до точки подвеса.
Для физического маятника не удаётся измерить с той же точностью, как пе- риод Т, необходимые для расчёта g величины Ι, lc. Поэтому разработан метод, по- зволяющий с помощью оборотного маятника исключить эти величины из расчёт- ной формулы. Допустим, что удалось найти такое положение осей вращения, что периоды колебаний маятника относительно этих осей совпадают: Т1 = Т2 = Т0. То- гда с учётом формулы (1) получим:
T 2 |
= 4π 2 (I |
с |
+ ml 2 )/ mgl |
1 |
; |
T 2 |
= 4π 2 (I |
с |
+ ml 2 )/ mgl |
2 |
. |
(2) |
0 |
|
1 |
|
0 |
|
2 |
|
|
Здесь l1 и l2 – расстояния от первой и второй осей до центра масс маятника, а их сумма l1 + l2 = l0 есть расстояние между осями, которое можно измерить достаточ- но точно.
Исключая из уравнений (2) величину Ic, получим расчётную формулу для ус- корения g:
g = |
4π 2l |
0 |
. |
(3)* |
T 2 |
|
|||
|
|
|
|
|
|
0 |
|
|
|
Этот метод позволяет с высокой точностью определить величину g, если найти такое расположение осей на стержне, при котором периоды колебаний маятника совпадают (Т не изменяется при смене оси, поэтому маятник и называется обо- ротным).
Порядок выполнения работы
Форма отчета приведена в приложении.
1.Повесить маятник на отверстие (2), расположенное вблизи конца полосы.
2.Отклонить маятник на 50…100 от положения равновесия и отпустить. Из-
мерив время t для n (десяти) колебаний, определить период Т1 колебаний. Резуль- таты записать в таблицу.
3.Снять маятник и измерить расстояние l между центрами отверстия (2) и крайним из отверстий (3).
4.Повесить маятник на крайнее из отверстий 3. Измерить время t2 для 10 ко- лебаний и определить период колебаний Т2.
5.Повторить измерение l и периода Т2 ещё несколько раз, перемещая ось ка- ждый раз на 1 отверстие.
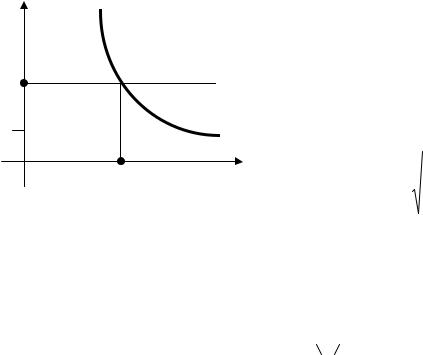
6.Построить график (рис. 2) зависимости периодов колебаний Т1 и Т2 от рас- стояния между осями на миллиметровке. Определить координаты Т0 и l0 точки пересечения графиков. l0 и есть то самое расстояние между осями, при котором периоды колебаний оборотного маятника вокруг осей одинаковы, т. е. Т1 = Т2 =
Т0.
48
|
|
|
|
|
|
|
Таблица |
t1, с |
T1, с |
№ |
l, м |
t2, с |
T2, с |
|
|
|
|
|
|
|
|
|
n = 10 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
l0 = |
см |
|
|
4 |
|
|
|
Т0 = |
с |
|
|
|
|
|
|
||
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Т, с
1,3 |
|
|
Т0 |
Т1 |
|
|
|||
1,2 |
|
|
||
|
||||
1,1 |
|
|
|
|
|
|
|
1,0
|
|
|
l0 |
|
|||
0 |
|
|
|
|
|
l, м |
|
0,2 |
0,4 |
||||||
|
|
||||||
Рис. 2
7.Рассчитать среднее значение ágñ по формуле (3).
8.Оценить систематическую погреш- ность измерения g, используя аналогию дифференциала функции (3) dg и
погрешности θg, (см с. 6 и формулу (5) на с. 15):
|
æ 2θT |
ö2 |
æ |
θ l ö2 |
|||
θg = ágñ |
ç |
0 |
÷ |
+ ç |
|
÷ |
|
T |
l |
||||||
|
ç |
÷ |
è |
ø |
|||
|
è |
0 |
ø |
|
|
|
|
Погрешностью округления числа π пренеб- регаем.
Поскольку точность измерения Т0 определяется графиком, то принять θТ равной цене малого деления шкалы на графике.
9. Записать результат в виде интервала
g=  g
g ±θg .
±θg .
10.Оценить отклонение найденной величины g от табличного значения для Челябинска (g = 9,80 м/с2).
49
|
|
|
|
|
|
РАБОТА № 8 |
|
|
|
|
|
|
|
|
||
ПРОВЕРКА ЗАКОНА СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА |
|
|||||||||||||||
Цель: проверить закон сохранения момента импульса и энергии при неупру- |
||||||||||||||||
гом взаимодействии маятников, оценить погрешность измерений. |
|
|
|
|
||||||||||||
Оборудование: специальная установка, секундомер, линейка. |
|
|
|
|
||||||||||||
|
|
|
|
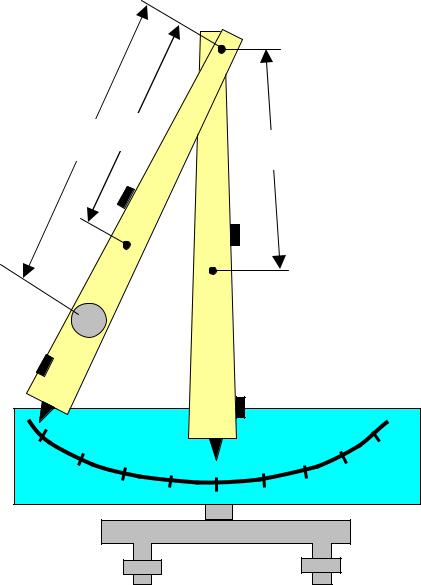
Описание установки |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Установка |
|
состоит |
из |
|||
|
l1 |
|
|
|
|
|
|
|
двух физических маятников |
|||||||
lГ |
|
|
|
|
|
|
|
(1) (масса m1) и (2) (масса |
||||||||
|
|
|
l |
|
|
|
|
m2), |
которые |
|
|
независимо |
||||
|
|
|
|
2 |
|
|
|
|
могут вращаться вокруг об- |
|||||||
|
|
|
|
|
|
|
|
|
||||||||
|
М |
|
|
|
|
|
|
|
щей оси О (рис. 1). Маятни- |
|||||||
|
|
|
|
|
|
|
|
ки снабжены магнитами М, |
||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
М |
|
|
|
|
с |
помощью |
которых |
они |
||||
|
ц. м. |
|
|
|
|
|
|
|
стягиваются и могут вра- |
|||||||
|
|
|
ц. м. |
|
|
|
|
|
щаться |
вокруг |
оси О, |
как |
||||
|
|
|
|
|
|
|
|
единое целое. Для измене- |
||||||||
|
|
|
|
|
|
|
|
|
||||||||
Г |
|
|
|
|
|
|
|
|
ния момента инерции к ма- |
|||||||
М |
|
|
|
|
|
|
|
|
ятнику 1 может быть при- |
|||||||
|
|
|
|
|
|
|
|
креплен добавочный груз Г |
||||||||
(1) |
|
|
М |
|
|
|
|
|
(масса mГ). |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
На |
каждом |
маятнике |
|||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
(2) |
|
|
|
|
|
красной меткой указано по- |
|||||||
20 |
|
|
|
|
|
|
|
20 |
ложение центра масс (ц.м.), |
|||||||
|
|
|
|
|
|
15 |
|
расстояние которого от оси |
||||||||
15 |
|
|
|
|
|
|
|
вращения равны, |
соответст- |
|||||||
10 |
5 |
0 |
5 |
|
|
10 |
Ш |
|||||||||
|
|
|
|
|
венно, |
l1 и l2. |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Винт |
Винт |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Рис. 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Очевидно, центр масс маятника с добавочным грузом находится от оси вращения |
||||||||||||||||
на расстоянии |
|
|
|
|
|
= m1l1 + mГlГ , |
|
|
|
|
|
|
|
|
||
|
|
|
|
l |
1Г |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
m1 |
+ mГ |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где lГ – расстояние центра груза от оси вращения. |
|
|
|
|
|
|
|
|
||||||||
50