

УМ_Пособие_09
.pdf21
|
|
Прямая задача |
|
|
|
Двойственная |
|
|
|
|
|
|
|
|
|
задача |
|
1. |
|
max F(X, ) |
|
|
|
|
min F(X, ) |
|
|
|
X |
|
|
|
|
|
|
2. |
Несвободные переменные |
Ограничения |
– |
|||||
|
xi 0, |
i=1,…,3 |
неравенства |
|
||||
|
|
|
|
F |
≥0, i=1,…,3: |
|
||
|
|
|
|
|
|
|||
|
|
|
|
xi |
|
|||
|
|
|
с1+λ1 +λ2*а1х1≥0, |
|
||||
|
|
|
с2+λ1 +λ2*а2х2≥0, |
|
||||
|
|
|
с2+λ1 +λ2*а3х3≥0 |
|
||||
3. |
Свободные переменные |
Ограничения- |
|
|||||
|
ОТСУТСТВУЮТ |
равенства |
|
|||||
|
|
|
ОТСУТСТВУЮТ |
|
||||
4. |
Ограничения-равенства |
Свободная |
|
|||||
|
3 |
|
переменная |
|
||||
|
xi |
100 0 |
λ1 |
|
|
|
||
|
i 1 |
|
|
|
|
|
|
|
5. |
Ограничения-неравенства |
Несвободные |
|
|||||
|
3 |
2 |
переменные |
|
||||
|
|
|
|
|
|
|
|
|
|
0.5ai xi 1000 0 |
|
2 |
0 |
|
|||
|
i 1 |
|
|
|
|
|
|
|
Множители Лагранжа
Неопределѐнный множитель Лагранжа λj указывает на степень изменения величины экстремума функции при изменении параметра bj ограничения.
Действительно, если величина bj в задаче может меняться, то точка экстремума X* и, следовательно, значение max(min) f(X*) станут зависимыми от bj. Предположив, что f(х) и ограничения – линейные функции, вычислим их производные:
f * |
f |
* |
x* |
g |
|
g |
* |
x* |
|
x |
, |
b |
x |
1, |
|||
b |
|
b |
|
|
b |
а т.к. f * g ,
x x
22
то имеем |
f * |
|
g |
* |
x* |
|
|
. |
|||
|
b |
|
x |
|
b |
Множители Лагранжа можно применять для решения задач оптимизации объектов на основе уравнений с частными производными и задач динамической оптимизации. При этом вместо решения системы конечных уравнений для отыскания оптимума необходимо интегрировать систему дифференциальных уравнений.
Следует отметить, что множители Лагранжа используют также в качестве вспомогательного средства и при решении специальными методами задач других классов с ограничениями типа равенств, например, в вариационном исчислении и динамическом программировании. Особенно эффективно применение множителей Лагранжа в методе динамического программирования, где с их помощью иногда удается снизить размерность решаемой задачи.
Упражнения 1
1.Найти экстремум функций и исследовать его на максимум и минимум:
a.f (x, y) 3x3 x2 y3 3y2 1;
b.f (x, y) 4x12 4x2 3;
c.f (x) 5x12 10x1 x2 x22 6x1 3x2 ;
d.f (x) 2x12 2x1 x2 x22 9x1 6x2 .
2.Найти стороны прямоугольника максимальной площади, вписанного в круг
х2+y2=г2.
3. Найти размеры прямоугольного параллелепипеда наибольшего объема с гранями параллельными координатным плоскостям, вписанного в эллипсоид
f (x, y, z) |
x2 |
|
y 2 |
|
z 2 |
1 0 . |
|
a2 |
b2 |
c2 |
|||||
|
|
|
|
4. Найти максимум функции f(х)= x1 x2 при условии g(x)= 3 x1 x2 2x1 x2 0 .
23
5. |
Найти экстремум функции |
f (x) 3x2 |
x2 |
8x x |
2 |
при |
|
|
|
|
1 |
2 |
1 |
|
|
|
условии |
|
|
|
|
|
|
|
x2 2x2 |
2x 3 . |
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
6. |
Найти максимальное и минимальное значения функции |
f = |
|||||
|
х + |
у в области G, |
заданной |
неравенствами |
|||
|
x2 y 2 |
2; x y 1. |
|
|
|
|
|
7.Найти максимальное и минимальное значения функции f = x - у при условии
х2 + у2 < 1; х + у = 1. |
|
|
|
8. Найти |
максимальное |
значение |
функции |
f (x) x 2x |
2 |
x |
0.5x2 |
|
|
||
1 |
|
1 |
|
2 |
|
|
|
при условиях |
2x1 |
3x2 |
6 0; x1 , x2 0 . |
|
|||
9. Найти |
максимальное |
значение |
функции |
||||
f (x) 2x x |
2 |
x2 |
x2 |
, |
|
|
|
1 |
|
1 |
2 |
|
|
|
|
при условиях |
|
x1 4x2 |
5 0; |
x1 , x2 0 . |
|
||
24
ОДНОМЕРНЫЙ ПОИСК
Аналитические методы оптимизации позволяют решать широкий класс задач, однако они обладают и рядом существенных недостатков-ограничений, основными из них являются следующие:
1. Как целевая функция решаемой задачи, так и все функции ограничения должны принадлежать классу C1 т.е. быть непрерывными функциями, частные производные которых также являются непрерывными функциями.
2. В общем случае количество задач |
решаемых методом |
||
Лагранжа велико и достигает N |
l |
C |
|
|
, и каждая задача |
||
|
1 |
l |
|
требует решения нелинейной системы уравнений.
3.Целевая функция и все ограничения должны быть заданы в аналитическом виде.
Это достаточно серьезные ограничения, поэтому усилия
математиков были направлены на разработку таких методов решения экстремальных задач, для реализации которых достаточно иметь возможность определять значение целевой и ограничивающей функций в произвольной точке из области их задания любым способом. Более того, вполне этих методов допускало бы не только вычислять, но и измерять значения целевой функции, если она отражает какой-либо физический процесс. Понятно, однако, что любой из подобных методов имеет ограниченную область применения, поскольку существенно использует специфику оптимизируемой функции и допустимой области.
Наиболее разработанными методами нелинейного программирования являются методы одномерного поиска.
В методах одномерной оптимизации рассматривается отрезок X=[a,b], содержащей искомое решение x*. Такой отрезок называется отрезком неопределенности, или отрезком локализации. Относительно целевой функции f(x) часто предполагается, что она унимодальная.
Функция f(x) называется унимодальной на X=[a,b], если существует такая точка x* X, что
где x1<x2<x*, x1,x2 X.
25
Если ограничиваться рассмотрением лишь непрерывных функций f(x), то свойство унимодальности функции попросту означает наличие у нее единственного локального максимума (минимума) и этот максимум (минимум) достигается в точке x*.
В ряде методов относительно целевой функции f(x) предполагается, что она выпуклая на X.
Функция f(x) называется выпуклой на Х=[a,b], если для любых x1,x2, X и всех , 0 1 справедливо соотношение: f (
x1+(1- ) x2) f (x1)+(1- ) f (x2).
Если при любых x1,x2, X неравенство будет строгим, то функция f(x) называется строго выпуклой.
Непрерывная строго выпуклая функция является унимодальной. Однако не всякая унимодальная функция является выпуклой или непрерывной.
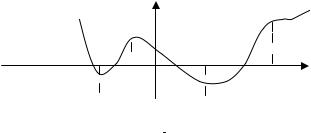
Функция f(x) имеет локальный минимум в точке Х0 (рис.1), если существует некоторая положительная величина , такая, что если |xi-x0|< , то f(xi) f(x0). Иными словами, если существует окрестность точки x0 , такая, что для всех значений хi из этой окрестности f(xi) больше f(x0), то функция f(x) имеет
хm
х0
Рис. 1
минимум в точке x0. Если для всех точек хi справедливо неравенство f(xi) f(x0), то функция f(x) имеет глобальный минимум в этой точке.
Критерий эффективности поиска
Пусть необходимо найти максимум унимодальной функции одной переменной f(х), заданной на единичном отрезке и не имеющей на ней горизонтальных участков. Функция f(x)
26
может не быть гладкой функцией, она может иметь изгибы и даже разрывы первого рода. Будем считать, что имеется возможность без всяких ошибок определять значения f(x) в любой точке 0 x 1, а определение величины f(x0) назовем «измерением» в точке x0. Для поиска максимума f(x) будем использовать результаты измерений в заданном количестве точек х.
Посмотрим, какую информацию о положении максимума могут нести результаты измерений. Ясно, что результат одного измерения не позволяет сделать никакого суждения о положении максимума. Совсем иное дело, когда имеем результаты двух измерений f(x1), f(x2), причем x1< x2.
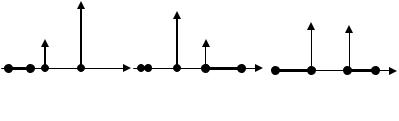
Тогда могут встретиться три случая (рис.2):
0 х1 |
х2 |
1 0 х1 |
х2 |
1 |
0 |
х1 |
х2 1 |
|
|
|
|
|
Рис. 2
1. f(x1) < f(x2) - из свойства унимодальности функции следует, что максимум не может находиться в промежутке [0, x1], поэтому этот промежуток может быть исключен из дальнейшего рассмотрения.
2. f(x1) > f(x2) - можно отбросить промежуток [x2, 1]. 3.f(x1) = f(x2) - максимум должен находиться в
промежутке [x1, x2], т.к. наша унимодальная функция не имеет горизонтальных участков.
Таким образом, в результате двух, а значит и большего числа измерений можно сократить область, в которой находится максимум, или, как мы будем говорить далее, интервал неопределенности положения максимума.
Пусть в результате n измерений длина интервала неопределенности стала ln, ясно, что сам этот интервал содержит в себе ту точку xk, в которой f(x) принимает наибольшее
27
значение, т.е. ln = xk+1- xk-1. Величина всех возможных интервалов [xk+1- xk-1], k=1, 2,…,n, зависит от распределения точек xk, т.е. от стратегии поиска. От вида функции f(x) зависит при каком именно значении k функция f(x) дает наибольшее значение.
Зависимость величины интервала неопределенности от стратегии поиска и от вида функции запишем в виде ln(xk,k).
Поставим задачу: найти такую стратегию поиска, при которой после n измерений величина ln окажется минимально возможной. Такую стратегию будем называть оптимальной. Однако предварительно в рассмотрение введем такие интервалы ln, которые не зависят от вида функции f(x).
Для этого достаточно иметь дело с не любыми интервалами, а только с наихудшим, т.е. наибольшим из них,
который обозначим через Ln. Тогда Ln = max ln xk , k
1 k n
Теперь наша задача наихудшего интервала по расстановки точек измерения, поиска, при которой
сводится к минимизации всем возможным способам т.е. к построению стратегии
L* |
min L |
(x |
) min maxl |
n |
(x , k) |
|
N |
n |
k |
xk |
|
k |
|
|
xk |
|
l k n |
|||
По существу, поиск минимаксной стратегии (оптимальной стратегии выбора положения точки xk) есть игра против природы.
Пассивный поиск
Рассмотрим оптимальные стратегии пассивного поиска, которые применяются, когда нельзя реализовать последовательную процедуру. Такая ситуация возникает при управлении доменным или любым химическим процессом, когда нет времени на последовательный анализ, а делается одновременный параллельный замер нужных параметров. При этом необходимо определить новые значения управляющих
28
параметров, которые обеспечили бы оптимальную близость к экстремуму.
Мы уже выяснили, что минимальное число экспериментов, которое приводит к сокращению неопределенности, это два, причем 0 х1 х2 1.
Рассмотрим, в каких точках нужно проводить измерения, чтобы максимально сократить интервал неопределенности в худшем случае. Т.е. определим при каких х1 и х2 максимальный из возможных интервалов длиной 1-х1, х2, х2-х1 окажется минимальным. Очевидно, это условие можно записать так:
L*2 min L2 (x1 , x2 ) min max 1 x1 , x2 .
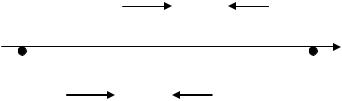
Нетрудно видеть, что оптимальное, на первый взгляд, решение L2=0.5, при х2=х1=0.5 отвергается из-за того, что х2>х1. Поэтому вводится минимальная величина , которая определяет погрешность измерительной аппаратуры, позволяющая при х2- х1= обнаружить разницу между соответствующими значениями y1=f(x1) и y2=f(x2). Тогда в результате экспериментов (рис.3), когда х1=0.5 - /2 и х2=0.5 + /2 можно получить не только требуемое разделение у1 и у2, но и интервал
L*2 min L2 (x1 , x2 ) min max [(0.5 + /2), (1 – (0.5 - /2)_]= 0.5 +/2
0 |
x1 |
|
0.5 |
|
/2 |
|
x2 |
1 |
|
|
|
||||||
|
|
|
|
|||||
|
|
|
|
|||||
|
|
|
|
|
|
|
||
|
|
|
/2 |
|
|
|
|
|
|
|
|
|
|
Рис. 3 |
|
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
Рассмотрим случай трех разных измерений, размещение которых на единичном интервале определяется следующими
условиями: |
|
|
х1 0 , |
х2 х1+ , |
х3 х2+ т.е. х2+ ≤ х3 ≤ 1. |
29
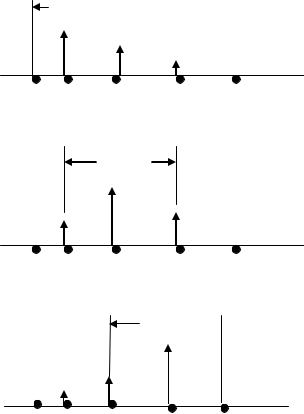
Пусть имеется некоторое размещение измерений: х1= 0.2, х2 = 0.6, х3 = 0.9. В этом случае длины возможных интервалов неопределенности изображены на рис.4.
Тогда L3 (0.2, 0,6, 0.9) = max (х2, х3-х1, 1-х2) = max (0.6, 0.7, 0.4) = 0.7.
L3=х2
L3=0.6 
0 |
х1 |
х2 |
х3 |
1 |
L
L3=0.7
0 |
х1 |
х2 |
х3 |
1 |
L3=1-х2
L3=0.4
0 х1 |
х2 |
х3 |
1 |
Рис. 4
30
Можно уменьшить L3, сблизив х1 и х3. Так, при х1=0.3, х2=0.6, х3=0.8, получим х3-х1=0.5. При этом L3 = max{0.6, 0.5, 0.4}=0.6. Теперь, перемещая х2 влево, можно еще уменьшить L3, однако будет увеличиваться величина 1-х2. Поэтому, для выбора х2 следует рассмотреть график функции max g(х2, 1-х2) в интервале 0.3 х1 х2 х3 = 0.8.
Не трудно видеть, что min max (х2, 1-х2)=0.5, при х2 =0.5.
Таким образом, оптимальной стратегией будет всякая пассивная стратегия, (х1, х2, х3), для которой х2=0.5 и х3-х1≤0.5, которая дает L*3 =0.5.
Из сравнения примеров проведения экспериментов в 2-х и 3-х точках следует, что добавление третьего эксперимента, требующего дополнительных средств и усилий в случае
пассивного поиска, мало себя оправдывает, так как разность L -
2
L = /2. Поэтому использование нечетного числа экспериментов
3
целесообразно лишь при большой погрешности измерений .
Поиск однородными парами
Из рассмотренного ранее можно сделать вывод, что существенное сокращение интервала неопределенности может дать лишь пара измерений. И если пара измерений сократила его почти в два раза, то k пар измерений может сократить этот интервал в (k+1) – раз (без учета ). Для этого достаточно все пары расположить равномерно на единичном интервале, причем расстояние между экспериментами одной пары должно составлять .
С учетом величина L*2k окажется несколько больше,
чем [1\ (к+1)]. Найдем величину L*2k . Точка предпоследнего эксперимента х2k-1 должна быть расположена на расстоянии х2k-1
= k L*2k - |
от начала интервала исследования, а длина |
последнего возможного интервала, содержащего точку х2k , есть величина интервала L2k-1 = 1 - х2k-1. Потребуем, чтобы L2k-1= L*2k , т.е.