

Detali_i_mekhanizmy_priborov_Labaratorny_prakt
.pdf
|
Показания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
шкалы |
|
–25 |
–20 |
|
|
–15 |
–10 |
|
–5 |
0 |
|
|
5 |
|
10 |
|
15 |
20 |
25 |
|
|||
|
барабана |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Число |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оборотов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
диска 8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Содержание отчета |
|
|
|
|
|
|
У |
||||||||
1. |
Титульный лист. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Т |
|||||||||||||
2. |
Цели и задачи выполнения работы. |
|
|
|
|
|
|
|||||||||||||||||
3. |
Оборудование и принадлежности к работе. |
|
|
|||||||||||||||||||||
Н |
|
|
|
|||||||||||||||||||||
4. |
Кинематическая схема вариатора. |
|
|
|
|
|
|
|
||||||||||||||||
5. |
Результаты измерений (таблица 6.1). |
|
|
|
|
|
||||||||||||||||||
6. |
График зависимости количества оборотов диска 8 от указаний |
|||||||||||||||||||||||
шкалы. |
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
||||||||
7. |
Выводы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Контрольные вопросы |
|
|
|
|
|
|
|
||||||||||
1. |
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
||||
Какие передачи отн сятся к ф икционным? |
|
|
|
|
|
|
|
|||||||||||||||||
2. |
Типы фрикционных передачр. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
3. |
Типы вариаторов. |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
4. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Принцип действ я лобового вариатора. |
|
|
|
|
|
|
|
|
|
|||||||||||||||
5. |
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Принцип действ я торового вариатора. |
|
|
|
|
|
|
|
|
|
|||||||||||||||
6. |
Принцип действ я вариатора с раздвижными конусами. |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
з |
|
|
|
Литература |
|
|
|
|
|
|
|
|
|
|
|
||||
1. |
Сч тно-решающие устройства / С. О. Доброгурский [и др.]. – |
|||||||||||||||||||||||
М. : Машиностроение, 1966. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
2. Song, C.-K. Performance assessment of an ultraprecision machine tool |
|||||||||||||||||||||||
positioningеsystem with a friction drive / C.-K. Song, Y.-J. Shin, H. Lee // |
||||||||||||||||||||||||
International Journal of Precision Engineering and Manufacturing. – |
||||||||||||||||||||||||
Vol. 6, No. 3. – 2005. – P. 8–12. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Р |
|
|
|
J. C. An |
ultra-high |
speed |
spindle |
for |
micro-milling / |
|||||||||||||||
|
3. Ziegert, |
|
||||||||||||||||||||||
J. C. Ziegert, J. P. Pathak, B. Jokiel.
70
Лабораторная работа № 7
ИССЛЕДОВАНИЕ ПЕРЕДАЧИ ВИНТ-ГАЙКА
Цель работы: ознакомление с основными конструктивными параметрами резьб и винтовых передач и методами их расчета; экспериментальное определение погрешности шага винтовой передачи при перемещении рабочего органа в заданных пределах.
|
|
|
|
Оборудование и принадлежности |
ТУ |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Узел с винтовой передачей. |
|
Н |
||||||
|
|
2. Штангенциркуль ШЦ-I. |
|
|
||||||
|
|
3. Линейка. |
|
|
|
|
||||
|
|
|
|
Теоретические положения |
|
|||||
|
|
|
|
|
|
Общие сведения |
Б |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Передача винт-гайка, или винтовой механ зм, служит для преобра- |
||||||||
зования вращательного движения в поступательноей . Эти передачи |
||||||||||
нашли широкое применение в |
азл чных механизмах машин и прибо- |
|||||||||
ров, в том числе и в медицинск йтехнике, например, в шприцевых |
||||||||||
дозаторах, компьютерных м |
|
и т. д. Широкому распростране- |
||||||||
|
|
|
|
|
|
|
графах |
|
|
|
нию винтовой пары сп с бс вуют: простота конструкции, компакт- |
||||||||||
ность, технологичнос ь, |
плавность |
и бесшумность работы, высокая на- |
||||||||
грузочная способность |
надежность, высокая степень редукции и воз- |
|||||||||
|
|
|
|
|
т |
|
|
|
|
|
можность получен я точных перемещений. Ведущим звеном, совер- |
||||||||||
шающим вращательноеидвижение, может быть как винт, так и гайка. |
||||||||||
В |
|
|
|
устр йствах иногда применяют конструкции, в которых |
||||||
|
|
|
|
з |
|
|
|
|
|
|
винт одн |
совершает вращательное и поступательное движе- |
|||||||||
|
|
|
ри невременноодвижной гайке. Выбор кинематической схемы передачи |
|||||||
опр д ля тся, главным образом, требованиями компоновки и условия- |
||||||||||
|
подъемных |
|
|
|
|
|
|
|
||
ми |
|
применения. К недостаткам этих механизмов относятся малый |
||||||||
ние |
|
|
|
|
|
|
|
|||
Р |
|
|
|
|
|
|
|
|
||
КПД и повышенная интенсивность изнашивания резьбы вследствие большого трения. Работа передачи основана на теории винтовой пары.
Виды механизмов и способы их применения представлены в таблице 7.1.
71
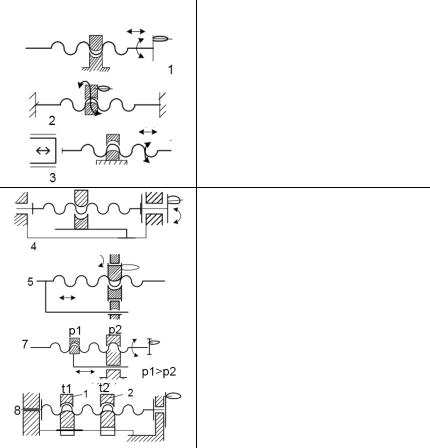
Таблица 7.1 – Виды винтовых механизмов
|
|
|
|
|
Вид механизма |
|
|
|
|
Применение |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Применяется для фокусировки объек- |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
тивов и т. д. Используется для малых |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
линейных перемещений |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Чаще всего используется для грубых |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
установочных перемещений |
У |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Применяется в юстированных и устано- |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
вочных устройствах |
|
Т |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Используется для перемещения кареток, |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
суппортов и т. д. |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Используется для сравнительно грубых |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
й |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
установочных движений (например, на- |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
ст ойка бинокля) |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дифференциальный винтовой механизм. |
|
|||||
|
|
|
6 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Используется как устройство малых пе- |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
т |
|
ремещений. рΣ = р1 – р2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
и |
|
|
Используется для малых перемещений |
|
||||||||
|
|
7 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
гайки 1 относительно гайки 2 |
|
|
||||||
|
|
|
|
|
|
з |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Также ис ользуются обращенные схемы механизмов 4 и 5. При- |
||||||||||||||
м н ние возможно при угле подъема резьбы, превышающем угол |
|||||||||||||||||
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
тр ния. Используется для транспортирования пленки, в выключа- |
|||||||||||||||||
теляхи . д. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
В винтовых передачах применяют метрическую, трапецеидаль- |
||||||||||||||
Рную и прямоугольную резьбы. Резьбы изготавливают с двумя, тремя |
|||||||||||||||||
и более заходами. Количество заходов Z в трапецеидальных и прямоугольных резьбах, как правило, не превышает четырех. При повороте винта на угол φ гайка поступательно перемещается на величину
72
e t / 2 , |
(7.1) |
где t Z P – ход;
Z – число заходов; Р – шаг.
Вдифференциальной винтовой передаче винт имеет Тдве резьбыУ
сразными шагами Р1 и Р2 одного направления. Функция перемещения выглядит следующим образом: НИз формулы следует, что дифференциальнаяБвинтовая передачаВыражение (7.1) является функцией перемещения винтовой пе-
обеспечивает малые линейные перемещения, меньшие, чем у стан-
дартных метрических резьб. Поэтому применение дифференциаль- |
||||||||
ной винтовой передачи может быть более предпочтительно, чем |
||||||||
уменьшение шага резьбы. |
|
|
й |
|
||||
В интегральной винтовой пе едаче |
|
Р1 и Р2 резьбы на винте |
||||||
|
|
|
|
|
шаги |
|
|
|
имеют различные направления, поэтому осевое смещение гайки |
||||||||
определяется из соотношения |
р |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
eо(P P ) / 2 |
. |
(7.3) |
|||
|
|
|
|
è |
1 2 |
|
|
|
|
|
|
т |
|
|
|
|
|
В такой передаче |
|
небольшом угле поворота винта можно |
||||||
|
|
при |
|
|
|
|
|
|
получить увеличение осевого смещение гайки. |
|
|||||||
|
|
з |
|
|
|
|
|
|
|
|
Осн вные сведения о геометрии резьб |
|
|||||
|
о |
|
|
|
|
|
|
|
Г ом трической основой резьб является винтовая линия. |
|
|||||||
|
п |
|
|
|
|
|
|
|
Винтовой называется линия (рисунок 7.1), образованная гипоте- |
||||||||
нузойеАВ прямоугольного треугольника АВС при огибании его во- |
||||||||
круг прямого кругового цилиндра. При этом один из катетов АС |
||||||||
треугольника совпадает с плоскостью основания цилиндра и равен |
||||||||
Р |
|
|
|
|
|
|
|
|
длине окружности основания. |
|
|
|
|
||||
73

|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
Рисунок 7.1 – Винтовая линия резьбы |
Т |
|||||
Резьба – это поверхность, образованная перемещениемНнекото- |
||||||||||
|
|
|
|
|
|
|
|
|
й |
|
рой плоской фигуры (треугольника, трапеции и т. д.) по винтовой |
||||||||||
линии (рисунок 7.2). Один оборот резьбы (винтовойБлинии) вокруг |
||||||||||
|
|
|
|
|
|
|
|
и |
|
|
боковой поверхности цилиндра называется в тком. Различают левую |
||||||||||
|
|
|
|
|
|
|
р |
|
|
|
и правую винтовые линии (левую правую резьбы). |
|
|||||||||
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
Рисунок 7.2 – Виды винтовых линий |
|
|||||
|
|
|
|
|
||||||
Контур сечения резьбы в плоскости, проходящей через ось цилиндра (винта), называется профилем резьбы. Профилем резьбы является та фигура, при винтовом движении которой образуется резьба.
74
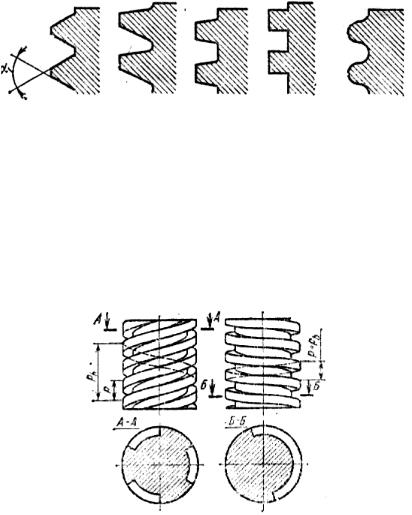
Различают пять основных типов резьб в зависимости от профиля: треугольная (рисунок 7.3, а), упорная (рисунок 7.3, б), трапецеидальная (рисунок 7.3, в), прямоугольная (рисунок 7.3, г) и круглая (ри-
сунок 7.3, д).
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
а |
|
|
б |
|
в |
|
г |
Н |
д |
|
|
|
|
|
|
Рисунок 7.3 – Типы резьб |
Б |
|
|
||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
й |
|
|
|
|
Все они находят применение в винтовых механизмах, при этом |
||||||||||||
вид профиля выбирают в зависимости от условий работы, назначе- |
||||||||||||
ния механизма, требований к точности |
КПД. |
|
|
|
||||||||
В зависимости от числа заходов разл чают однозаходные и мно- |
||||||||||||
|
|
|
|
|
|
р |
|
|
|
|
|
|
гозаходные резьбы (рисунок 7.4). Многозаходная резьба получается |
||||||||||||
|
|
|
|
|
о |
|
|
|
|
|
||
при перемещении по параллельнымивинтовым линиям нескольких |
||||||||||||
рядом расположенных пр филей (см. |
исунок 7.1). Число заходов |
|||||||||||
|
|
|
|
|
применяют |
|
|
|
|
|
|
|
резьбы определяют по числу сбегающих витков на торце винта. В вин- |
||||||||||||
|
|
|
|
и |
|
|
|
|
|
|
|
|
товых механизмах |
|
в |
сновном многозаходные резьбы. |
|||||||||
|
|
|
з |
|
|
|
|
|
|
|
||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 7.4 – Однозаходные и многозаходные резьбы
Геометрические параметры резьбы
75
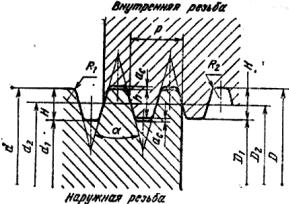
Основные параметры цилиндрической резьбы рассмотрим на примере резьбы с трапецеидальным профилем (рисунок 7.5): d, D – наружный диаметр резьбы, являющийся номинальным диаметром резь-бового соединения; d1, D1 – внутренний диаметр резьбы соот-
ветственно винта и гайки; d2, D2 |
– средний диаметр резьбы, т. е. |
|
У |
диаметр воображаемого цилиндра, на котором ширина витка равна |
|
ширине впадины; Н – высота исходного контура, равная высоте профиля (без учета скругления вершин и впадин); h – рабочаяТвысота профиля, по которой соприкасаются витки винта и гайки; ас – радиальный зазор; Р – шаг резьбы, равный расстояниюНмежду одноименными сторонами двух соседних витков, измеренному по образующей цилиндра; Рh – ход резьбы, равныйБрасстоянию между одноименными сторонами двух соседних витков одной и той же винтовой поверхности (см. рисунок 7.1); для однозаходных резьб Рh = Р, а для много-заходных Рh = nР, где n – число заходов; α – угол
профиля |
|
|
|
|
|
|
|
|
|
|
|
h и |
|
резьбы; |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
γ – угол подъема резьбы, равный углу подъема винтовой линии на |
|||||||||||||||||||||
среднем цилиндре резьбы: |
р |
й |
|
|
|||||||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
tg |
P |
|
|
nP |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
d |
|
d . |
|
|
||||||||
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Все геометрические параме ры большинства резьб и допуски на |
|||||||||||||||||||||
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|||||
их размеры стандар зованыо. |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 7.5 – Основные параметры резьбы
76
По назначению передачи делят на три вида:
1.Грузовые – для создания больших осевых сил. Профиль резьбы трапецеидальный симметричный при двухсторонней передаче движения под нагрузкой и несимметричный для одностороннего рабочего движения при больших нагрузках (упорная резьба, см. рисунок 7.3).
2.Ходовые – применяемые в различных механизмах подачи. Для уменьшения потерь на трение ходовые винты изготавливаютУс трапецеидальной многозаходной резьбой. Для устранения «мертвого хода» вследствие износа резьбы и появления люфта гайкиТходовых винтов выполняют разъемными.
3.Установочные – используемые для точных перемещенийН и регулирования. Эти винты имеют резьбу с треугольным профилем (метрическая резьба). Б
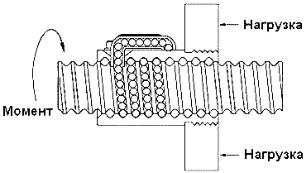
В настоящее время разработано много конструкций специальных винтовых пар (шариковинтовые передачий), которые позволяют ком-высокий
|
|
|
|
|
|
рисунок |
|
|
|
|
|
о |
|
|
|
|
|
т |
|
|
|
|
|
и |
|
|
|
|
|
з |
|
|
|
|
|
о |
|
|
|
|
|
Р |
п |
Рисунок 7.6. – Шариковинтовые передачи |
||||
е |
Силовые соотношения в винтовой паре |
|||||
Рассмотрим силы, действующие в винтовой паре с прямоугольной резьбой (рисунок 7.7). При завинчивании гайка, равномерно вращаясь под действием окружной силы Ft, приложенной по касательной к окружности среднего диаметра d2 резьбы, перемещается вдоль оси
77
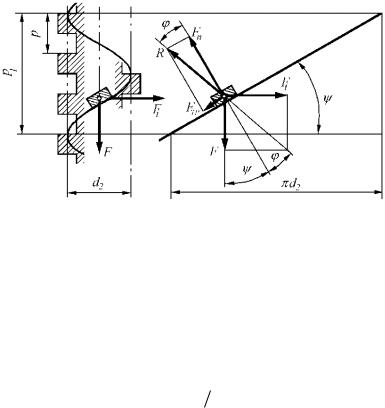
винта под действием осевой силы F. Развернем виток резьбы в наклонную плоскость, а гайку представим в виде ползуна. При равномерном перемещении по наклонной плоскости ползун находится
в равновесии под действием системы сил F, Ft, Fn и Fтр, из которых |
||||||||||
Fn – нормальная реакция наклонной плоскости, Fтр = f·Fn – сила тре- |
||||||||||
ния. Результирующая сила R отклонена от силы Fn на угол трения . |
||||||||||
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
Б |
|
|
|
|
|
|
|
о |
й |
|
|
||
|
Рисунок 7.7 – Силы взаимодействияимежду винтом и гайкой |
|
||||||||
|
|
|
|
т |
р |
|
|
|
||
Из схемы сил следует: |
|
|
|
|
|
|||||
|
|
|
и |
F tg F f , |
|
|
||||
|
|
з |
F |
|
|
(7.4) |
||||
|
|
t |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
где f – |
коэффиц |
|
|
я в резьбе; |
|
|
|
|||
|
|
ент трен |
|
|
|
|
||||
ψ – уг л п дъема резьбы, т. е. угол, образованный разверткой |
||||||||||
п |
|
|
|
|
|
|
|
|
|
|
винтовой линии по среднему диаметру резьбы и плоскостью, пер- |
||||||||||
пендикулярн й |
си винта. |
|
|
|
|
|
||||
|
|
|
|
|
|
tg p1 d2 , |
|
(7.5) |
||
гдеp1 – ход резьбы, т. е. расстояние между одноименными сторона- |
||||||||||
ми одного и того же витка в осевом направлении (см. рисунок 7.7): |
||||||||||
Рдля однозаходной резьбы p1 = p; для многозаходной p1 = n·p, |
|
|||||||||
n – число заходов резьбы;
p – шаг резьбы, т. е. расстояние между одноименными сторонами соседних профилей, измеренное в направлении оси резьбы.
78
Зависимость (7.5) справедлива только для прямоугольной резьбы, т. е. когда φ = arctg f. Метрическая, трапецеидальная и упорная (вообще остроугольные) резьбы характеризуются дополнительным трением вследствие клинчатой формы профиля. В этом случае принимают приведенный коэффициент трения
где γ – угол наклона рабочей грани профиля (γ = 30° – для метрической резьбы, γ = 15° – для трапецеидальной резьбы, γ = 3° – для
У(7.6)
упорной резьбы). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|||
Теперь приведенный угол трения |
|
|
|
Б |
||||||||||||||
|
|
|
|
|
|
|
|
|
arctg f /cos . |
Н |
(7.7) |
|||||||
|
|
|
arctg f |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
||||
Таким образом, для получения соотношения между окружной Ft |
||||||||||||||||||
и осевой F силами в винтовой паре с остроугольной резьбой в фор- |
||||||||||||||||||
|
|
|
t |
|
|
р |
|
|
|
|
|
|
||||||
мулу (7.5) необходимо поставить вместойдействительного приве- |
||||||||||||||||||
денный угол трения, т. е. |
о |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
т |
|
|
ψ +φ |
|
. |
|
|
|
|
|
|||||
|
|
|
F |
F tg |
|
|
|
|
(7.8) |
|||||||||
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Кинема ческие соотношения в передаче |
|
|
||||||||||||||
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При проектирован |
передачи обычно задаются: |
|
|
|||||||||||||||
– величин й перемещения гайки е; |
|
|
|
|
|
|
|
|||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– временемзперемещения Т; |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
– усилием на гайке Q. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Зависимость между длиной перемещения l, мм, временем Т, с, |
||||||||||||||||||
и числом оборотов винта n, мин–1, определяется формулой |
|
|||||||||||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
е |
|
|
|
l p z |
|
n |
|
, мм, |
|
|
|
(7.9) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
1 |
|
60 |
|
|
|
|
|
|||
где р – шаг;
z1 – число заходов.
79