

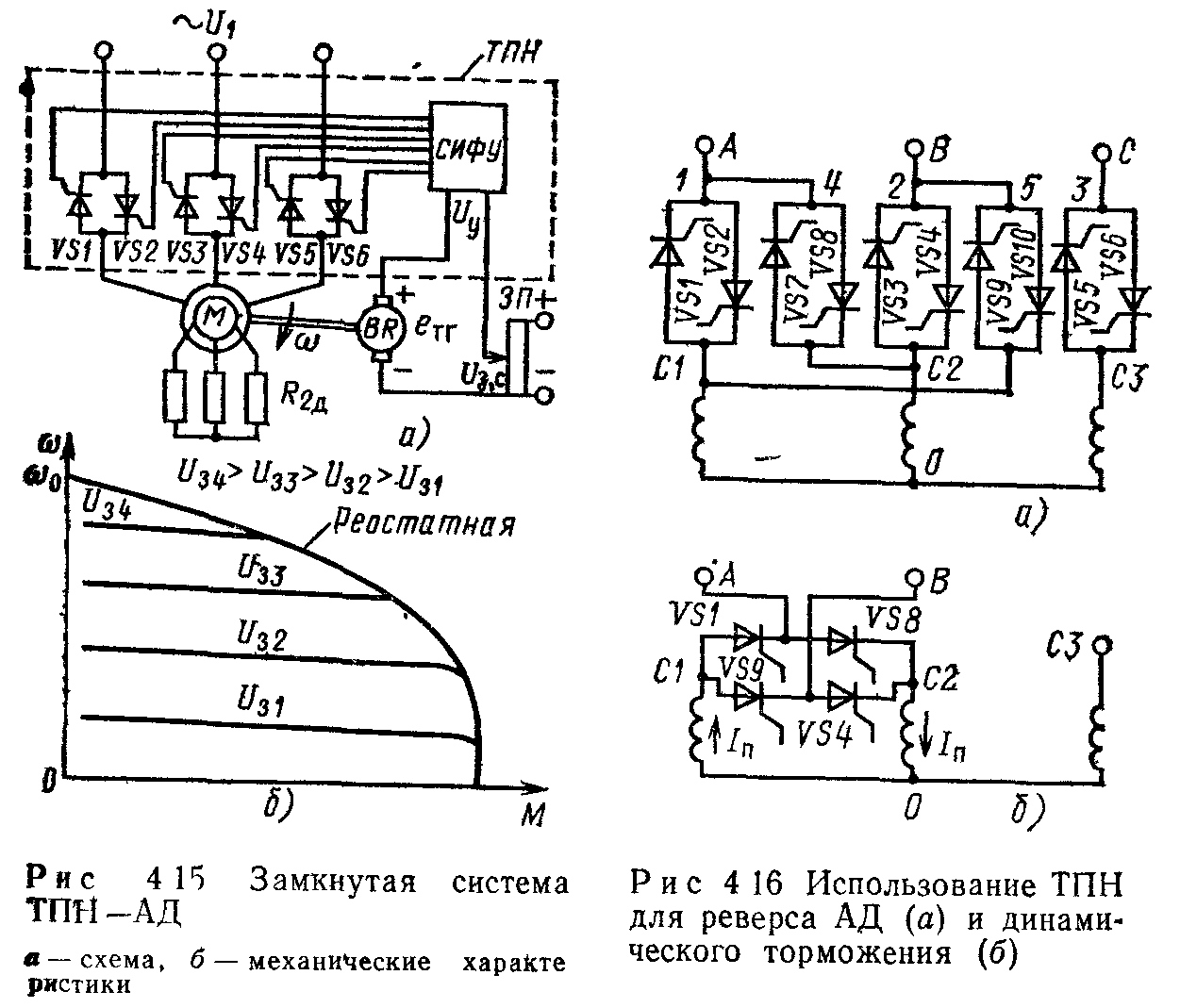
24 Автоматическое регулирование угловой скорости асинхронных эп при помощи тиристорных регуляторов напряжения.
|
|
Рассмотрим работу схемы при увеличении нагрузки на валу АД. Пусть при скорости АД 1таким образом подобраны задающий сигналUз,си сигнал обратной связиетг, что угол управленияравен 75° (рис.4.15, в). Тогда при моменте сопротивленияMс1АД будет работать в точке1. При увеличении нагрузки на валу АД до значенияМс2скорость АД начнет снижаться, соответственно начнет уменьшаться и ЭДС тахогенератораетг~. Уменьшениеетгвызывает увеличение напряжения управленияUy, что определит уменьшение с помощью СИФУ угла управления до значения=60°. Двигатель при этом станет работать в точке2на характеристике, соответствующей=60°. При этом угловая скорость2будет меньше, чем1, однако путем соответствующего выбора тахогенератора и параметров СИФУ можно получить достаточно жесткие механические характеристики, например характеристику вида1–2. Изменяя с помощью потенциометраЗПзначение задающего напряженияUз,с, можно получить ряд механических характеристик электропривода, показанных на рис. 4.15,б. Из рис. 4.15,бследует, что эти характеристики имеют относительно высокую жесткость и перегрузочную способность и позволяют обеспечить большой диапазон регулирования скорости АД.
|
|
|
|

25 Сравнительная характеристика типов регулируемых асинхронных электроприводов.
26 Выбор эп и принципа управления лифтом.
На выбор типа электропривода существенно влияют кинематическая схема лифта, требования к времени движения кабины от исходного этажа положения кабины к этажу назначения по вызову или приказу, ограничения на ускорение и рывки.
??????
27 Основные типы тиристорных преобразователей частоты.
1. Преобразователи частоты с непосредственной связью.
Предназначен для преобразования высокой частоты в низкую. В основе преобразователя лежит трехфазная нулевая схема выпрямления.

Достоинства: высокий КПД; возможность независимого регулирования амплитуды напряжения на выходе от частоты; возможностьплавно регулировать выходную частоту fpeг.
Недостатки: ограниченное регулирование выходной частоты (0-40 % fсети ).
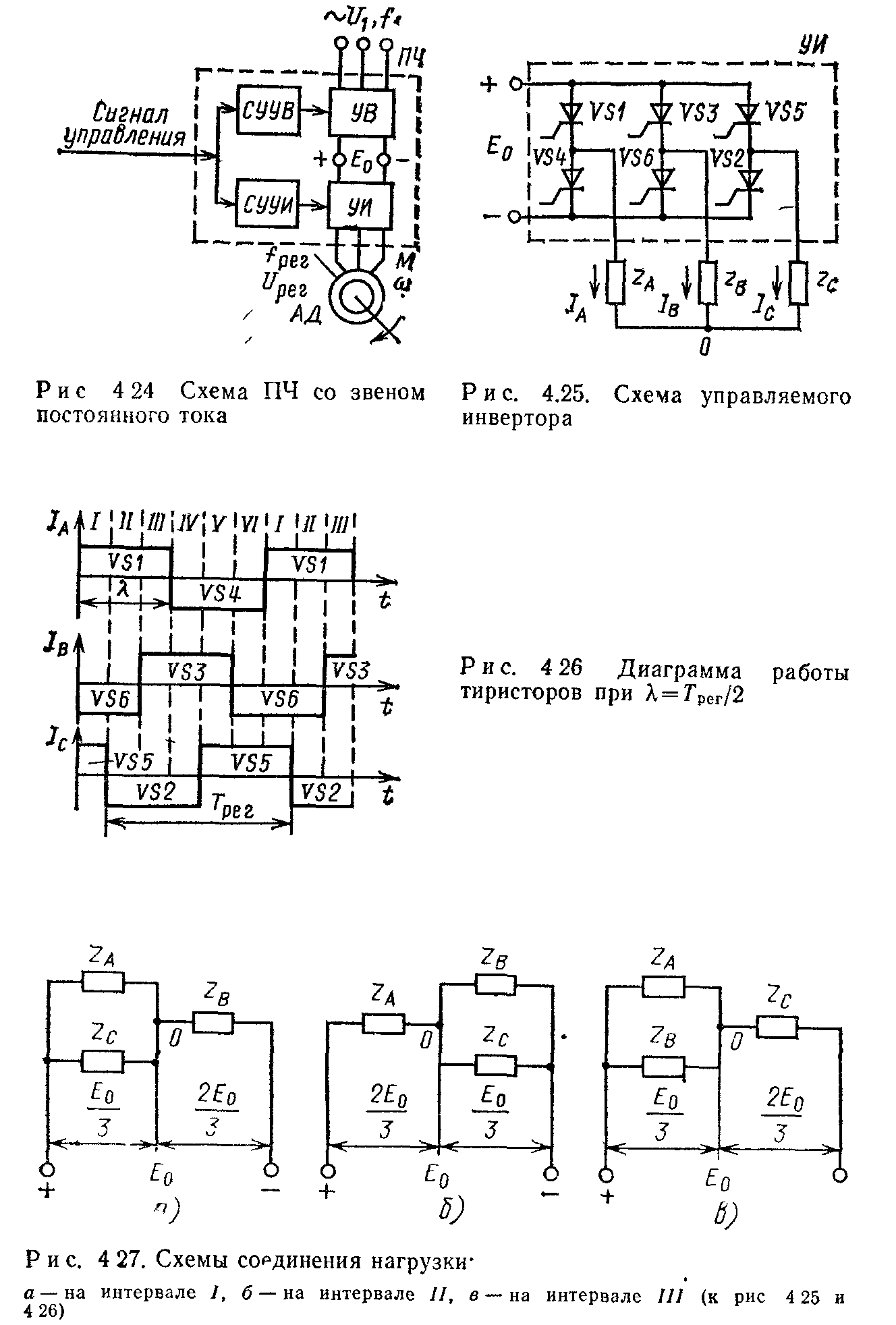
2. Статический преобразователь частоты с промежуточным звеном постоянного тока.
Преобразователь состоит из управляемого выпрямителя УВ и инвертора УИ. Кроме двух силовых элементов преобразователь содержит блок управления выпрямителем СУУВ и блок управления инвертором СУУИ. Выходная частота регулируется в широких пределах.
Преобразователь позволяет регулировать частоту как вверх, так и вниз от частоты питающей сети, высокий КПД (ок. 0,96), быстродействие, малые габариты, сравнительно высокая надежность и бесшумность в работе.
3. Преобразователь частоты с инвертором работающим по принципу широтно-импульсной модуляции.
В тех случаях, когда инвертор питается от сети постоянного тока или от неуправляемого выпрямителя, применяют широтно-импульсные регуляторы напряжения (ШИР).
Схемы с ШИР могут обеспечить широкий диапазон регулирования выходного напряжения и высокий коэффициент мощности ПЧ во всем диапазоне регулирования частоты. В случае применения в преобразователе автономных инверторов с фазной коммутацией тиристоров в инверторе совмещают функции инвертирования и регулирования напряжения методом широтно-импульсной модуляции.
Отличительной особенностью этих инверторов является не только регулирование напряжения и частоты, но и получение формы выходного тока, близкого к синусоидальному.