

МУ КП ЭП ЗДЭО-41 24_01_2015
.pdfМетодические указания
Проектирование электропривода грузоподъемного
механизма
Лист
Изм. Лист |
№ докум. |
Подпись Дата |
2 |
|
СОДЕРЖАНИЕ
ИСХОДНЫЕ ДАННЫЕ
1 ПОСТРОЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ МЕХАНИЗМА
2 РАСЧЕТ СТАТИЧЕСКИХ МОМЕНТОВ
3 РАСЧЕТ ПРИВЕДЕННОГО СТАТИЧЕСКОГО МОМЕНТА
4 ПРЕДВАРИТЕЛЬНЫЙ ВЫБОР СКОРОСТИ И МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
5 ПРИВЕДЕНИЕ ИНЕРЦИАЛЬНЫХ МАСС
6 РАСЧЕТ ДИНАМИЧЕСКИХ МОМЕНТОВ
7 ПОСТРОЕНИЕ ТАХОГРАММЫ И НАГРУЗОЧНОЙ ДИАГРАММЫ ЭЛЕКТРОПРИВОДА
8 ПРОВЕРКА ЭЛЕКТРОДВИГАТЕЛЯ ПО НАГРЕВУ И ПЕРЕГРУЗОЧНОЙ СПОСОБНОСТИ
9 ПОСТРОЕНИЕ ЕСТЕСТВЕННОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ
10 ВЫБОР СИСТЕМЫ УПРАВЛЕНИЯ
11 ПОСТРОЕНИЕ ИСКУССТВЕННЫХ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК
12 ПРОЕКТИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
Лист
Изм. Лист |
№ докум. |
Подпись Дата |
3 |
|
ИСХОДНЫЕ ДАННЫЕ
Исходные данные для расчета:
№ |
J1, |
2 |
J2, |
2 |
J3, |
2 |
J4, |
2 |
J5, |
2 |
i1 |
i2 |
m0, |
m1, |
m2, |
D, |
V, |
а, |
2 |
вар. |
кг·м |
|
кг·м |
|
кг·м |
|
кг·м |
|
кг·м |
|
|
|
кг |
кг |
кг |
м |
м/с |
м/с |
|
m1 масса кабины;
m0 грузоподъемность m2 масса противовеса. D диаметр шкива.
i1 передаточное число первой ступени редуктора. i2 передаточное число второй ступени редуктора.
V – скорость
а – ускорение кабины
Лист
Изм. Лист |
№ докум. |
Подпись Дата |
4 |
|
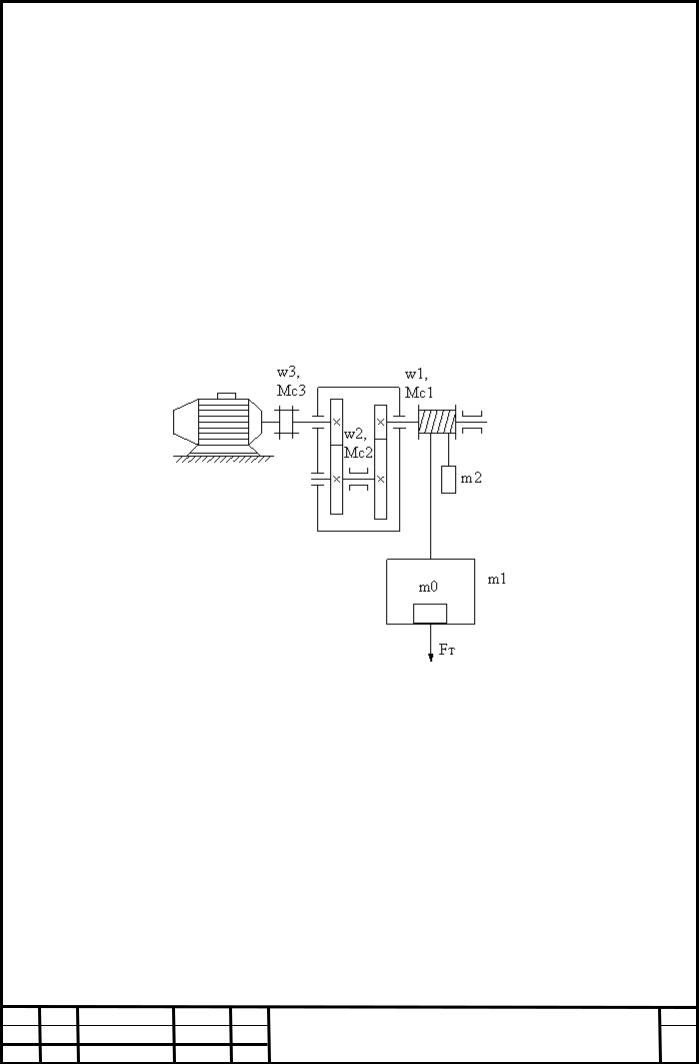
1 ПОСТРОЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ МЕХАНИЗМА
При расчёте будем руководствоваться следующими допущениями:
а) в начале рабочего цикла кабина находится на первом этаже, её двери закрыты;
б) во время движения кабина проходит максимальный путь, причём поднимается полностью загруженной, а опускается пустой.
На рисунке 1 приведена кинематическая схема механизма в исходном состоянии.
Рис.1- Кинематическая схема с указанием статических моментов и сил
Лист
Изм. Лист |
№ докум. |
Подпись Дата |
5 |
|
2 РАСЧЕТ СТАТИЧЕСКИХ МОМЕНТОВ
Сила тяжести, действующая со стороны кабины с грузом:
FT1 (m1 m0 ) g
Сила тяжести, действующая со стороны кабины без груза:
FT1 m1 g
Сила тяжести, действующая со стороны противовеса:
FT 2 m2 g
Статический момент, действующий на валу шкива с грузом:
МС1 (FT1 FT 2 ) D2
Статический момент, действующий на валу шкива без груза:
|
|
FT 2 ) |
D |
|
|||
|
|||
МС1 |
(FT1 |
2 |
|
|
|
|
Статический момент, действующий на промежуточном валу редуктора:
MC 2 MC1 i1
Статический момент, действующий на валу двигателя:
MC3 MC 2 i2
Лист
Изм. Лист |
№ докум. |
Подпись Дата |
6 |
|
3 РАСЧЕТ ПРИВЕДЕННОГО СТАТИЧЕСКОГО МОМЕНТА
Приведенный момент действующий на валу двигателя определяется из закона сохранения мощности
M |
|
|
|
M |
|
, следовательно M |
|
|
1 |
М |
|
ПР |
ДВ |
С1 |
ПР |
|
С1 |
||||||
|
|
|
1 |
|
ДВ |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Приведенный статический момент, действующий на валу двигателя, при движении с грузом:
M ПР МС1 .
i1 i2
Приведенный статический момент, действующий на валу двигателя, при движении без груза:
|
|
|
|
|
МС1 |
||
|
|
|
|
M ПР . |
|||
|
i1 |
i2 |
|
4 ПРЕДВАРИТЕЛЬНЫЙ ВЫБОР СКОРОСТИ И МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
Предварительно определяем требуемую мощность двигателя:
РТр КЗ 3 МС3
где Kз – коэффициент запаса, Kз =1,3.
Обоснование выбора электродвигателя.
Асинхронные двигатели обладают большими преимуществами перед другими электродвигателями: стабильность частоты вращения, малая масса и габариты, большей срок службы, высокое К.П.Д., малая шумность, легкость в обслуживании.
Предварительно выбираем асинхронный электродвигатель со следующими номинальными параметрами:
|
Р ; J ДВ |
|
|
|
; |
|
; mП ; mK ; sH ; sK ; cos H ; H1 ; Х М ; R1 |
; X1 |
; R2 |
||
; n0 . |
|
|
|
|
|
X 2 |
|
|
|
|
5 ПРИВЕДЕНИЕ ИНЕРЦИАЛЬНЫХ МАСС
Выполняется исходя из закона сохранения кинетической энергии:
|
J |
ПР |
2 ДВ |
|
(J |
4 |
J |
5 |
) 2 |
(J |
2 |
J |
3 |
) 2 |
(J1 |
J ДВ ) 32 |
||||
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
; |
|
|||||
|
|
|
2 |
|
|
2 |
|
|
|
2 |
|
|
2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Лист |
Изм. Лист |
№ докум. |
|
Подпись Дата |
|
|
|
|
|
|
|
7 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Суммарный момент инерции при движении кабины с грузом:
|
|
V |
2 |
|
J J ПР (m1 m2 |
m0 ) |
|
||
3 |
||||
|
|
|
Суммарный момент инерции при движении пустой кабины:
|
|
V 2 |
|
m2 ) |
|
|
|
|
|||
J J ПР (m1 |
|
||
|
|
3 |
|
6 РАСЧЕТ ДИНАМИЧЕСКИХ МОМЕНТОВ
Рассчитываем динамические моменты, возникающие во всех возможных переходных процессах:
М ДИН J ДВ .
Угловое ускорение на шкиве:
1 D а
Ш 2
Угловое ускорение на промежуточном валу редуктора:
2 1 i1
Угловое ускорение на валу двигателя:
3 2 i2
Угловое ускорение при торможении на валу двигателя:
ТОРМ 13 3
1)Подъем кабины с грузом. Динамический режим при пуске:
M ДИН .П J 3
Динамический режим при торможении.
M ДИН .Т . J ТОРМ
2)Спуск кабины с грузом.
M ДИН .П. J 3
M ДИН .Т . J ТОРМ
3)Подъем пустой кабины.
Лист
Изм. Лист |
№ докум. |
Подпись Дата |
8 |
|
М J
ДИН .П 3
M J
ДИН .Т . ТОРМ
4)Спуск пустой кабины.
М J
ДИН .П 3
M J
ДИН .Т . ТОРМ
7 ПОСТРОЕНИЕ ТАХОГРАММЫ И НАГРУЗОЧНОЙ ДИАГРАММЫ ЭЛЕКТРОПРИВОДА
Построение тахограммы
Полное время цикла:
Т ЦИКЛ 2 (t ПУСК tУСТ tТОРМ t ПАУЗЫ )
N число циклов в час. Принимаем N 40 циклов час .
Тцикл 360040 90с .
Время пуска:
tПУСК 3
3
Время торможения:
tТОРМ 3 ТОРМ
Продолжительность включения - принимается стандартное значение.
ПВ
Время работы:
t |
|
|
ТЦИКЛ |
|
ПВ% |
|
РАБ. |
2 |
100 |
||||
|
|
|
||||
|
|
|
|
Время движения с установившийся скоростью:
tУСТ tРАБ tПУСК tТОРМ
Время паузы:
tПАУЗЫ . ТЦИКЛ tРАБ
2
Лист
Изм. Лист |
№ докум. |
Подпись Дата |
9 |
|
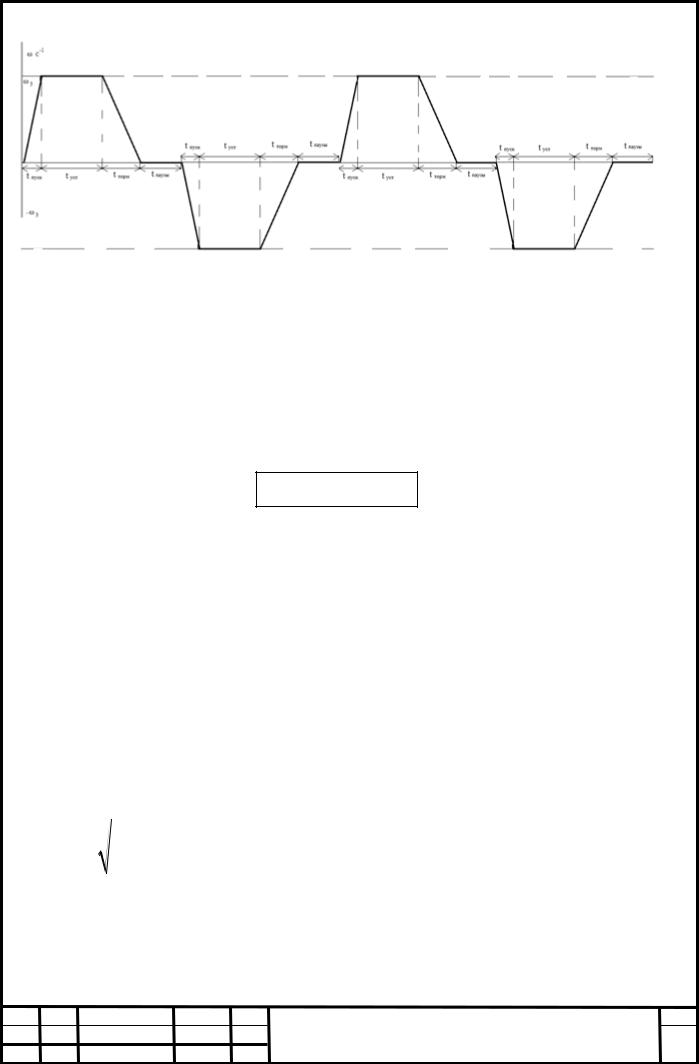
Рис.2 Тахограмма работы электропривода
Построение нагрузочной диаграммы
На основании основного уравнения движения электропривода
М М СТ М ДИН
определяем величину момента на валу двигателя во всех возможных режимах работы
М М СТ М ДИН
1)Подъем с грузом. – пуск;– установившийся режим;– торможение. 2)Спуск с грузом. – пуск;– установившийся режим;– торможение. 3)Подъем без груза. – пуск;– установившийся режим;– торможение. 4)Спуск без груза. – пуск;– установившийся режим;– торможение.
Рис.3 Нагрузочная диаграмма работы электропривода
Эквивалентный момент нагрузки:
М ЭКВ |
Мi2 |
ti |
ti |
|
|
|
|
Уточняем требуемую мощность двигателя
Р ТР КЗ МЭКВ 3 Вт.
Лист
Изм. Лист |
№ докум. |
Подпись Дата |
10 |
|
8ПРОВЕРКА ЭЛЕКТРОДВИГАТЕЛЯ ПО НАГРЕВУ
ИПЕРЕГРУЗОЧНОЙ СПОСОБНОСТИ
Проверка двигателя по нагреву:
Выбранный двигатель проходит по условиям нагрева если выполняется следующее условие:
М К M Max
MК – критический момент двигателя
Mmах – максимальный момент нагрузки, определяемый из нагрузочной диаграммы
Проверка двигателя по перегрузочной способности:
Выбранный двигатель проходит по условиям перегрузки, если выполняется условие:
М П. Д . M П.НГ
где МП.Д. – пусковой момент двигателя; МП.НГ. – наибольший пусковой момент нагрузки, определяемый из
нагрузочной диаграммы.
9 ПОСТРОЕНИЕ ЕСТЕСТВЕННОЙ МЕХАНИЧЕСКОЙ
|
|
|
|
|
ХАРАКТЕРИСТИКИ |
Естественной |
механической характеристикой называется зависимость |
||||
f (M ) , построенная при номинальных параметрах источника питания. |
|||||
Воспользуемся упрощенной формулой Клосса. |
|||||
М |
|
2 М К |
|
|
|
sK |
s |
s |
sK |
||
|
|
|
|||
где sK – критическое скольжение выбранного двигателя,
Угловую частоту вращения ротора будем рассчитывать по формуле:
2 n0 (1 s) .
60
Задаваясь различными значениями скольжения s в диапазоне s = (0…1), определяем соответствующие значения момента и частоты вращения.
Лист
Изм. Лист |
№ докум. |
Подпись Дата |
11 |
|