

1.2. Учение об измерениях.
В измерениях практика первична, а обобщение и формализация закономерностей вторичны. Поскольку единой универсальной концепции науки об измерениях нет, да она и не может быть построена, говорят не о теории измерений, а "учение об измерениях".
Предмет учения об измерениях – систематическая погрешность. Задача учения об измерениях – минимизация случайной составляющей погрешности результата измерений. Метод учения об измерениях – перевод случайной погрешности, или ее доли, в систематическую погрешность.
1.2.1. Понятия и категории измерений.
Измерение и оценивание: измерение есть процедура установления соответствия величины значению меры, оценивание – соответствия интервалу значений (интервал может быть и полубесконечным). Зададимся вопросом, почему к погрешности всегда применяют термин оценивание, а не измерение? Потому что погрешности, как это следует из ее определения, не может быть поставлено в соответствие конкретное значение, а может быть приписан лишь интервал, в пределах которого погрешность находится. Термин оценивание используется и в квалиметрии, но термин измерение – исключительно в метрологии. Результат измерения связан с метрологической оценкой предельным переходом (здесь под термином оценка понимается результат операции оценивания).
1.2.2. Сигнал измерительной информации.
В подавляющем большинстве случаев этот сигнал возможно представить одномерной функцией (как правило, временным сигналом), намного реже для его описания требуется использование функций двумерных (плоских изображений). Особенности математического описания сигналов и изображений. Существуют, однако, трех- (пространственные) и более многомерные формы определения сигналов и преобразований.
Из всех вариантов в лекциях мы подробно рассмотрим только двумерные сигналы измерительной информации. Возможные представления сигнала (детерминированный случай): временное – развертка (см. рис. 1.2.2 левый), частотное – спектр (см. рис. 1.2.2 средний), фазовое – фазовый портрет (см. рис. 1.2.2 правый) [109]. Аналитическая связь временного, частотного и фазового представлений сигнала дается парой интегральных преобразований – преобразованием Фурье (временное-частотное) и преобразованием Гильберта (временное-фазовое).
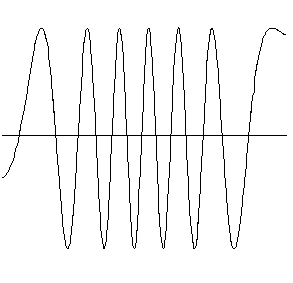
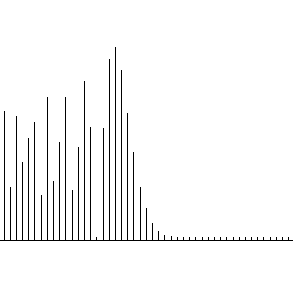
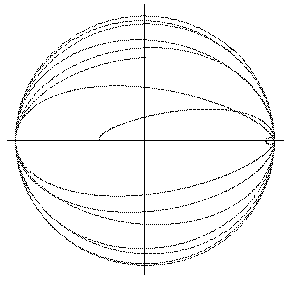
Рис. 1.2.2. Три представления сигнала измерительной информации.
Теорема Винера-Хинчина уже предполагает переход к вероятностному описанию сигнала измерительной информации. Вероятностный же подход наиболее четко отражает и физическую, и метрологическую реальность, включая в себя детерминированный сигнал в качестве частного случая [1], который можно получить предельным переходом, искусственно устремив искажения к нулю.
Временное представление. Рассмотрим измерение некоторой величины x(t), флуктуирующей со временем. На практике иногда удается отыскать распределение вероятностей p(x) ее значений, хотя более типична одновременная доступность измерению ее среднего значения и дисперсии.
 Однако
среднее и дисперсия очень мало говорят
о внутреннем механизме происходящего
[80]. В этом плане больший интерес
представляла бы величина, служащая
мерой влияния значения x в момент t на
значение x в момент t+.
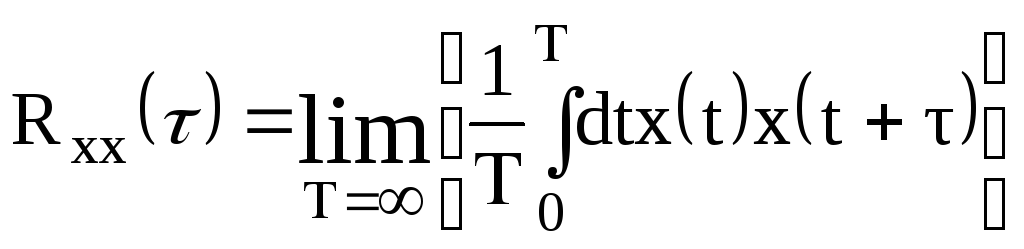
Такой величиной является автокорреляционная
функция, которая, по-видимому, была
введена в рассмотрение Тэйлором [81] как
Однако
среднее и дисперсия очень мало говорят
о внутреннем механизме происходящего
[80]. В этом плане больший интерес
представляла бы величина, служащая
мерой влияния значения x в момент t на
значение x в момент t+.
Такой величиной является автокорреляционная
функция, которая, по-видимому, была
введена в рассмотрение Тэйлором [81] как
Ее физический смысл – среднее по некоторому временному интервалу T (который потом устремляется к бесконечности) произведения двух значений x, взятых в моменты времени, различающиеся на .
 Если
случайные величины представлены
выборочными значениями x(t) и y(t+)
разных случайных процессов, то выражение
Если
случайные величины представлены
выборочными значениями x(t) и y(t+)
разных случайных процессов, то выражение
называется взаимной корреляционной функцией.
Остановимся теперь на аналоговом и цифровом представлениях измерительной информации; в итоге операций дискретизации аргумента и квантования функции мы придем к понятию цифрового сигнала.
Для
того, чтобы иметь возможность перенести
какую-либо измерительную информацию,
сигнал должен быть тем или иным образом
преобразован (промодулирован), – в
отсутствие модуляции сигнал информации
не содержит. Сущность
модуляции заключается в изменении
какого-либо параметра модулируемого
сигнала согласно изменению значений
модулирующего (преобразующего) сигнала.
Число возможных видов модуляции сигнала
равно числу его параметров, которые
можно изменять (модулировать). Мы изучим
только наиболее часто встречающиеся
виды модуляции гармонического (рис. 1)
и и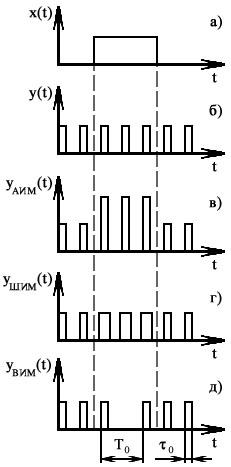 мпульсного
сигналов (рис. 2).
мпульсного
сигналов (рис. 2).
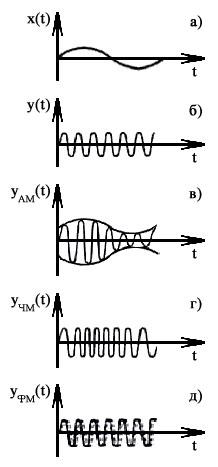
Рис. 1. Виды гармонической модуляции: Рис. 2. Виды импульсной модуляции:
а – модулирующий сигнал; а – модулирующий сигнал;
б – модулируемый сигнал; б – модулируемый сигнал;
в – амплитудная модуляция; в – амплитудно-импульсная модуляция;
г – частотная модуляция; г – широтно-импульсная модуляция;
д – фазовая модуляция. д – время-импульсная модуляция.
Если в качестве модулируемого сигнала берется элементарная синусоида
![]() ,
,
определяемая амплитудой y0, частотой ω0 и фазой φ0, то в результате воздействия модулирующего сигнала x(t) на y0 можно получить амплитудную модуляцию (рис. 1в), на ω0 – частотную модуляцию (рис. 1г) и на φ0 – фазовую модуляцию (рис. 1д). Аналитически модуляция определяется умножением модулируемого параметра сигнала на множитель 1+m·x(t).
При амплитудной модуляции амплитуда модулированного сигнала изменяется согласно выражению y(t) = y0 + ∆y·x(t). Тогда
![]()
Глубина модуляции m=∆y/y0, где ∆y – девиация амплитуды.
При частотной модуляции частота модулированного сигнала изменятся согласно выражению ω(t) = ω0 + ∆ω·x(t). Тогда

Глубина модуляции m=∆ω/ω0, где ∆ω – девиация частоты.
При фазовой модуляции фаза модулированного сигнала изменяется согласно выражению φ(t) = φ0 + ∆φ·x(t). Тогда
![]()
Глубина модуляции m=∆φ/φ0, где ∆φ – девиация фазы.
Анализ амплитудной, частотной и фазовой модуляции показал, что мощность модулированных сигналов увеличивается, чем объясняется увеличение их устойчивости ко всякого рода неинформативным искажениям. Так, при амплитудной модуляции мощность модулированного сигнала в течение периода изменяется и ее максимальное значение в 1+m2 раз превышает мощность немодулированного сигнала.
Мощность
сигнала зависит от вида модуляции. Так,
при малом случайном искажении
флуктуационного типа, т.е. при РС
![]() РИ,
РИ,
![]()
где РС – мощность сигнала; РИ – мощность искажения; ß – параметр, в большинстве случаев ß > 1. Из формулы следует, что отношение мощности сигнала к мощности искажения при частотной модуляции в 3,3раза превышает это отношение при модуляции амплитудной. Следовательно, частотно-модулированный сигнал более устойчив к искажениям, чем амплитудно-модулированный. Но амплитудная модуляция получила большее распространение в измерительной технике из-за более простой технической реализации.
Модуляция гармонического сигнала используется в основном при передаче по информационному каналу одного сигнала измерительной информации x(t). Если по одному каналу надо последовательно передавать ряд сигналов, используя коммутацию, то применяются импульсные виды модуляции. Импульсный сигнал (рис. 2б) определяется следующим выражением:
![]()

t
– текущее время; ti0
– фиксированный момент начала импульсов,
![]() T0
–
период импульсного сигнала; τ0
–
длительность импульса.
T0
–
период импульсного сигнала; τ0
–
длительность импульса.
Так же как и в предыдущем случае, в результате воздействия модулирующего сигнала x(t) на модулируемый y(t) при воздействии на y0 можно получить амплитудно-импульсную модуляцию (АИМ), на τ0 – широтно-импульсную модуляцию (ШИМ), на T0 и ti0 – время-импульсную модуляцию (ВИМ). Как и для модуляции гармонического сигнала, процесс импульсной модуляции определяется умножением модулируемого параметра на множитель 1+mx(t) – см. рис. 2а. Тогда справедливы выражения:
для АИМ
![]()
для ШИМ
![]()
для ВИМ
![]()
Исследование помехоустойчивости импульсной модуляции показало значительное преимущество время-импульсной модуляции. Но наглядность представления модулируемого сигнала, большее быстродействие преобразования сигнала и простота реализации обеспечили много более широкое использование амплитудно-импульсной модуляции при формировании сигналов измерительной информации.
Но, если с помощью модуляции сигнал обогащается измерительной информацией, что происходит, например, в первичных измерительных преобразователях (в частном случае – датчиках), то дискретизация, квантование и кодирование – уже прерогатива вторичных измерительных преобразователей (в частности – масштабных) и вторичных измерительных приборов. При этом дискретизация и квантование играют одну из основных ролей в информативной обработке сигнала, кодирование – вспомогательную.
Рассмотрение процессов квантования, дискретизации и кодирования сигналов измерительной информации необходимо не только для изучения свойств сигналов, как таковых, но и для изучения их преобразований, происходящих в цифровых измерительных приборах, для которых эти операции при измерении физических величин являются основными. Так, квантование непрерывного сигнала х(t) производится при любой измерительной операции, когда значение измеряемого сигнала соотносится с какой-либо заданной мерой. Дискретизация и кодирование непрерывного сигнала необходимы для организации передачи множества сигналов по одному каналу, для ввода данных в компьютер с целью их последующей программной обработки, для уменьшения динамической погрешности при регистрации быстропротекающих процессов.
Н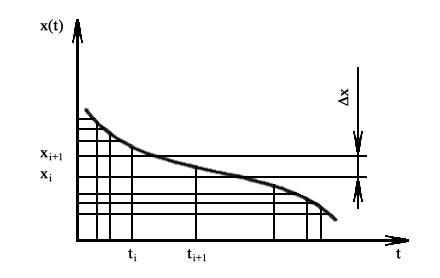 аиболее
распространенный вид квантования
измеряемого сигнала х(t)
–
это квантование по уровню. При этом
преобразовании диапазон изменения
непрерывного сигнала представляется
значениями, разделенными друг от друга
на интервалы квантования ∆х= хi+1–хi,
где хi+1
и хi
–
это i+1
и i-й
уровни квантования. Если ∆х имеют
одинаковое значение, то квантование
равномерное, если они не равны, то
квантование неравномерное (рис. 3).
аиболее
распространенный вид квантования
измеряемого сигнала х(t)
–
это квантование по уровню. При этом
преобразовании диапазон изменения
непрерывного сигнала представляется
значениями, разделенными друг от друга
на интервалы квантования ∆х= хi+1–хi,
где хi+1
и хi
–
это i+1
и i-й
уровни квантования. Если ∆х имеют
одинаковое значение, то квантование
равномерное, если они не равны, то
квантование неравномерное (рис. 3).
Рис. 3. Неравномерное квантование по уровню.
Сигнал, квантованный по уровню, в функции времени может быть представлен как произведение единичной ступенчатой функции (функции Хевисайда)
на число интервалов квантования, содержащихся в i-м уровне:
![]()
Значения
x
в пределах одного интервала квантования
необходимо относить к какому-либо
уровню. Очевидно, этими уровнями могут
быть либо верхняя, либо нижняя граница
интервала, либо середина интервала, а
из рис. 4 следует, что последний способ
округления наиболее рациональный, так
как погрешность квантования уменьшается
вдвое. Погрешность квантования
![]() в
первых двух способах округления имеет
максимальное значение
в
первых двух способах округления имеет
максимальное значение
![]() ,
а при третьем
способе округления
,
а при третьем
способе округления
![]() ,
т.е. наибольшая погрешность равна
половине и
,
т.е. наибольшая погрешность равна
половине и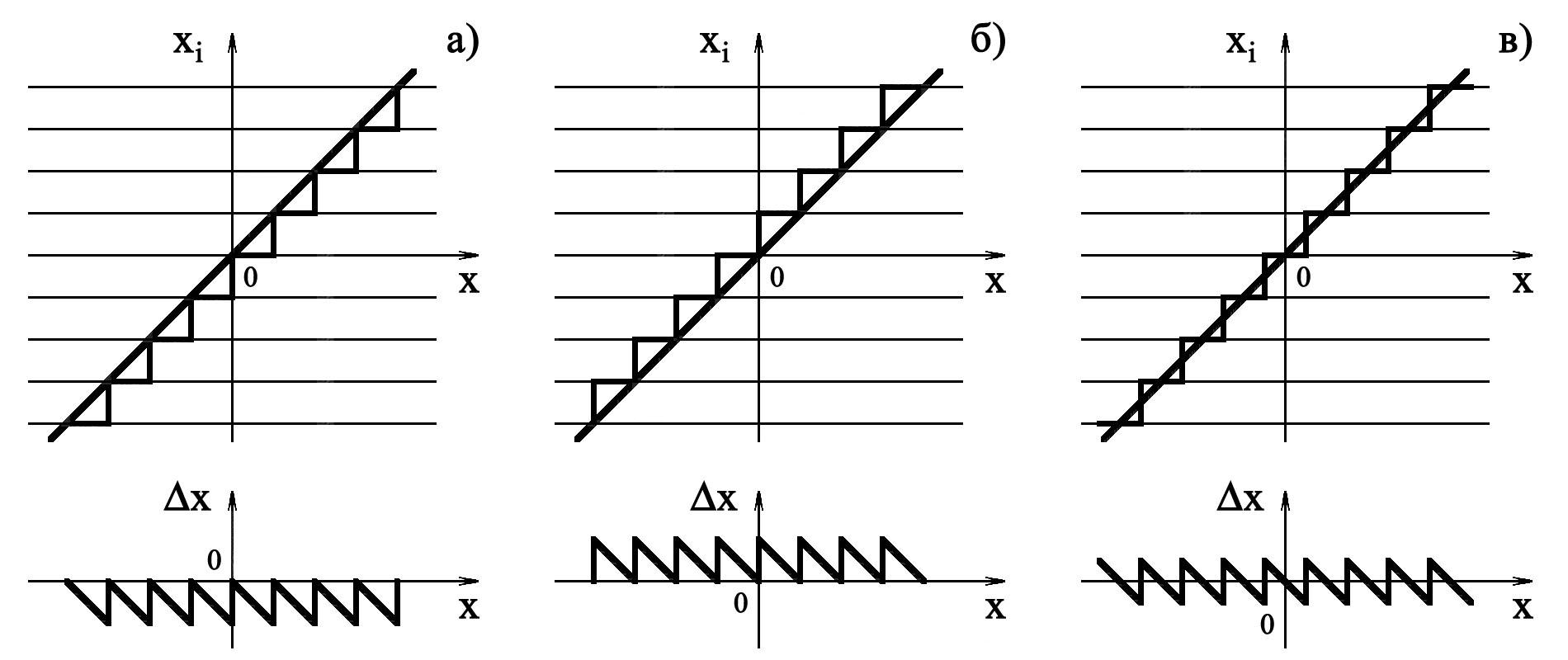 нтервала
квантования.
нтервала
квантования.
Рис. 4. Погрешность квантования по уровню:
а – при округлении по верхним границам интервала квантования;
б – при округлении по нижним границам интервала квантования;
в – при округлении по середине интервала квантования.
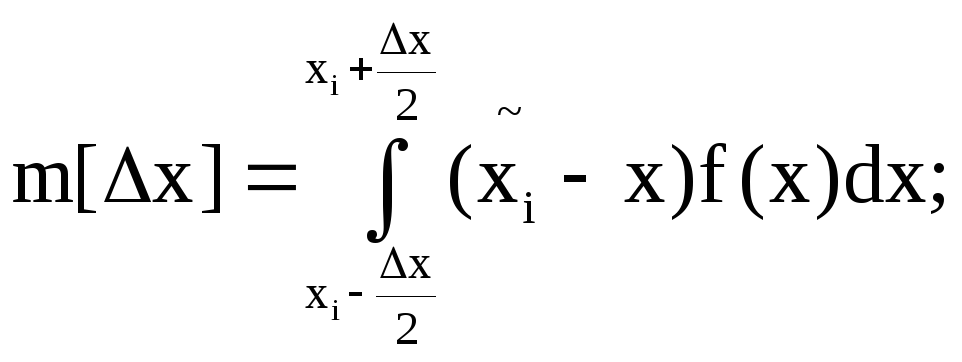
Так как x – случайная величина с плотностью распределения f(x), то и ∆x – также случайная величина, зависящая от x, с той же плотностью распределения. Ее статические характеристики следующие:
математическое ожидание
дисперсия
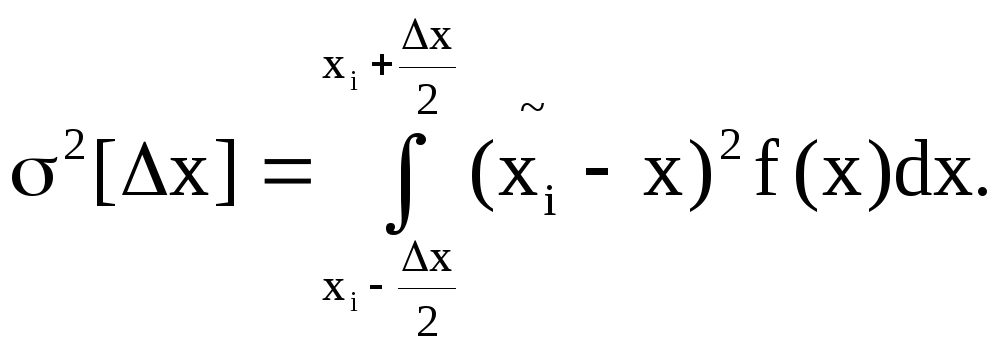
Для большого числа уровней N плотность вероятности внутри одного интервала квантования можно считать равномерной, тогда m[∆x]=0; [∆x]=∆x/12,
а среднее квадратическое отклонение
![]() (*)
(*)
Зная статистические характеристики погрешности квантования, можно найти число уровней квантования N при заданной погрешности. Если ∆x=(b-a)/N то, подставляя (*) в последнее выражение, получим
![]()
где
![]() – диапазон изменения значений измеряемого
сигнала; N
– число уровней квантования.
– диапазон изменения значений измеряемого
сигнала; N
– число уровней квантования.
Дискретизацией непрерывного по времени сигнала x(t) является преобразование его в последовательность дискретных значений x(i·Tц),
где
![]() (рис. 5). Временной интервалTц
между соседними аргументами процесса
называется шагом
дискретизации.
(рис. 5). Временной интервалTц
между соседними аргументами процесса
называется шагом
дискретизации.
Р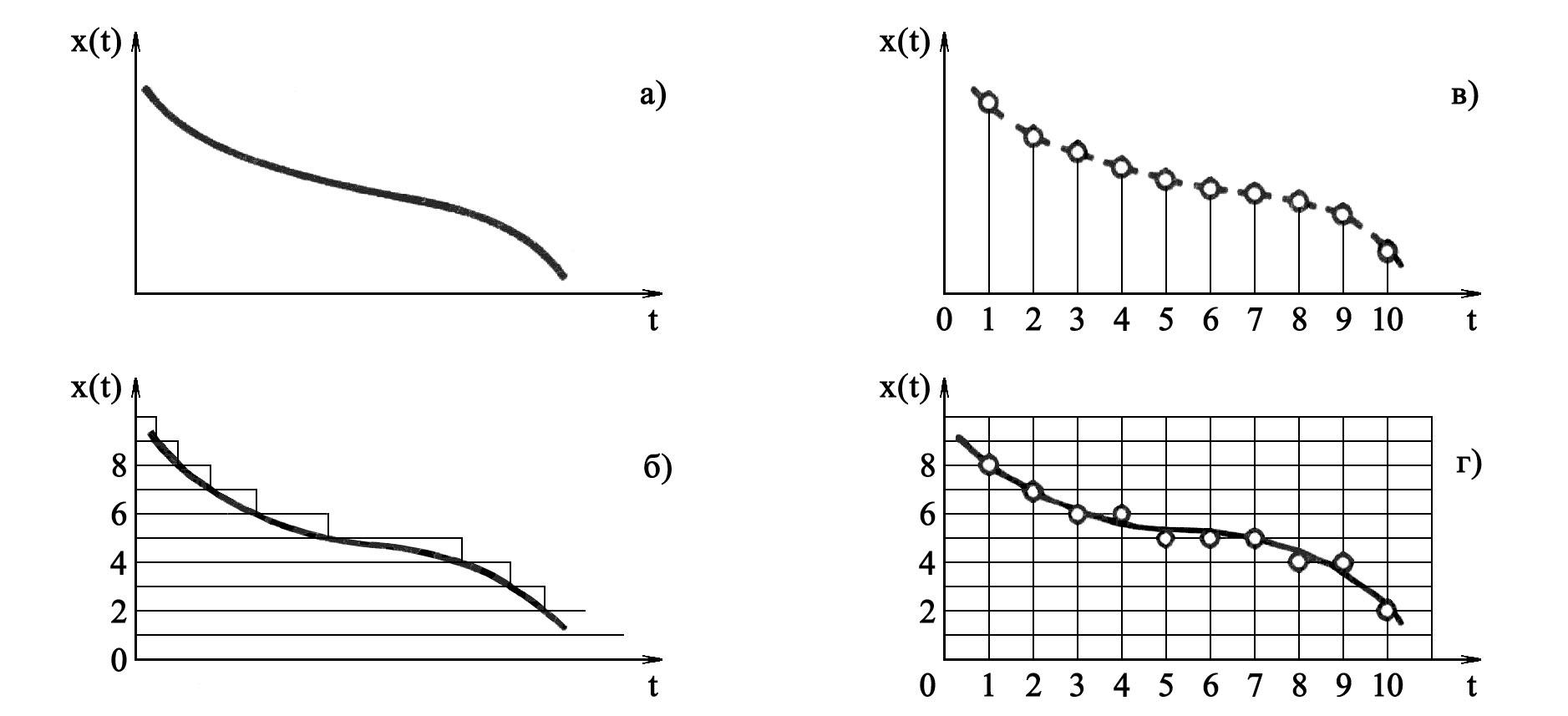 ис.
5. Виды сигналов измерительной информации:
ис.
5. Виды сигналов измерительной информации:
а – аналоговый, б – квантованный, в – дискретизованный, г – цифровой.
Дискретизация процесса может быть равномерной, тогда Tц=var. Шаг дискретизации Tц выбирается таким образом, чтобы задача восстановления неравномерного сигнала по его заданным дискретным значениям решалась с минимальной погрешностью. Аналитически дискретный сигнал может быть представлен в виде
![]()
где δ(·) – функция Дирака.
Особый интерес представляет случай, когда дискретный сигнал проквантован (рис. 5г), т.е. каждая его ордината x(ti) соотнесена с числом интервалов квантования ∆х и представлена в виде x(ti)=N(ti)·∆х. Тогда квантованный дискретный сигнал аналитически выражается как
![]()
Такой сигнал называется цифровым.