

Раздел 6.Конечные автоматы
Практическая работа №14
ПОСТРОЕНИЕ МИНИМАЛЬНЫХ АВТОМАТОВ
1. Общие сведения

Конечный автомат состоит из конечного управления и входной ленты, разбитой на ячейки. В каждой ячейке записан один символ из входного алфавита Σ, и все они образуют конечную входную цепочку. Конечное управление первоначально находится в состоянии q0 и сканирует крайнюю левую ячейку ленты. По мере чтения входной цепочки слева направо автомат переходит в другие состояния из множества Q. Если, прочитав входную цепочку, автомат оказывается в некотором конечном состоянии из множества F, то говорят, что он принял ее. Множество цепочек, принимаемых конечным автоматом, называется языком, распознаваемым данным конечным автоматом.
Определение.
Конечным
автоматом
называется
формальная система M
= (Q,
Σ,
δ, q0,
F),
где
Q
- конечное
непустое множество состояний;
Σ
- конечный входной
алфавит; δ
- отображение
типа
QxΣ
→
Q;
q0
![]() Q
- начальное состояние; F
Q
- начальное состояние; F![]() Q
- множество
конечных
состояний.
Q
- множество
конечных
состояний.
Запись
δ(q,
a) =p, где
q
![]() p,
Q
и
a
p,
Q
и
a![]() Σ,
означает, что конечный автомат M
в
состоянии q,
сканируя
входной символ a,
продвигает свою входную головку
на одну ячейку вправо и переходит в
состояние p .
Σ,
означает, что конечный автомат M
в
состоянии q,
сканируя
входной символ a,
продвигает свою входную головку
на одну ячейку вправо и переходит в
состояние p .
Автомат «вообще»- управляющая система, являющаяся конечным автоматом или некоторой его модификацией, полученной путем изменения его компонент или функционирования. Основное понятие - конечный автомат - возникло в середине 20 века в связи с попытками описать на математическом языке функционирование нервных систем, универсальных вычислительных машин и других реальных автоматов. Характерной особенностью такого описания является дискретность соответствующих математических моделей и конечность областей значений их параметров, что приводит к понятию конечного автомата.
Наряду с понятием конечного автомата рассматриваются различные его обобщения и модификации, отражающие те или иные особенности реальных устройств. Для конечного автомата (A, S, B, , ) существующие модификации можно разбить на следующие три основные группы.
-
К первой группе относятся автоматы, у которых некоторые из алфавитов A (входной), S (состояний) или B (выходной) бесконечны, в связи с чем такие автоматы называются бесконечными.
-
Ко второй группе относятся автоматы, у которых вместо выходной и переходной функций и допускаются произвольные отношения или случайные функции. Таковы частичные, недетерминированные, вероятностные и другие автоматы.
-
К третьей группе относятся автоматы со специфическими множествами входных объектов. Таковы, например, автоматы с переменной структурой.
Существуют автоматы, принадлежащие одновременно разным группам. Наряду с этим большую роль играют специальные подклассы конечных автоматов, например, автоматы без памяти. Кроме того, использование понятий и методов из других разделов математики также приводит к появлению специфических классов автоматов и связанных с ними задач. Например, при применении алгебраических средств возникают понятия автоматов над термами, линейного, группового, свободного и других; вопросы теории кодирования порождают понятия самонастраивающихся, обратимых автоматов и другие.
Теория автоматов - это раздел теории управляющих систем, изучающий математические модели преобразователей дискретной информации, называемые автоматами. С определенной точки зрения такими преобразователями являются как реальные устройства (вычислительные машины, автоматы, живые организмы и т.д.), так и абстрактные системы (например, формальная система, аксиоматические теории и т.д.). Наиболее тесно теория автоматов связана с теорией алгоритмов.
Большинство задач теории автоматов - общие для основных видов управляющих систем. К ним относятся задачи анализа и синтеза автоматов, задачи полноты, минимизации, эквивалентных преобразований автоматов и другие.
-
Задача анализа состоит в том, чтобы по заданному автомату описать его поведение или по неполным данным об автомате и его функционированию установить те или иные его свойства.
-
Задача синтеза автоматов состоит в построении автомата с наперед заданным поведением или функционированием. Задача полноты состоит в выяснении, обладает ли множество M' M автоматов свойством полноты, т.е. совпадает ли с M множество всех автоматов, которые получаются путем конечного числа применений некоторых операций к автоматам из заданного подмножества автоматов M' .
-
Задача эквивалентных преобразований в общем виде состоит в том, чтобы найти систему правил преобразований (так называемую полную систему правил) автоматов, которые удовлетворяют определенным условиям и позволяют преобразовать произвольный автомат в любой эквивалентный ему автомат (два автомата эквивалентны, если они имеют одинаковое поведение автомата. Поведение автомата - математическое понятие, описывающее взаимодействие автомата с внешней средой. Примером внешней среды конечного автомата является множество входных слов, а поведением - словарная функция, реализуемая автоматом, или событие, представимое автоматом.)
Теория автоматов находит применение как и в других областях математики, так и в решении практических задач. Например, средствами теории автоматов доказывается разрешимость некоторых формальных исчислений. Применение методов и понятий теории автоматов к изучению формальных и естественных языков привело к возникновению математической лингвистики (математическая лингвистика - математическая дисциплина, предметом которой является разработка формального аппарата для описания строения естественных и некоторых искусственных языков.) Понятие автомата может служить модельным объектом в самых разнообразных задачах, благодаря чему возможно применение теории автоматов в различных научных и прикладных исследованиях.
Способы задания автоматов.
-
Во-первых, автомат может быть задан в виде непосредственного описания функций:
fq1={q2 (x1/y1); q3 (x2/y2); q4 (x3/y1)}
fq2={q1(x1/y1); q2 (x1/y2); q3 (x3/y2)}
fq3={q3 (x1/y2); q1 (x2/y1); q2 (x3/y1)}
fq4={q4(x1/y1); q2 (x2/y2); q1 (x3/y2)},
где X={x1, x2, x3} –входной алфавит
Z={q1,q2,q3,q4} – множество состояний автомата
Y={y1,y2} – выходной алфавит
-
Во-вторых, уравнения могут быть представлены в табличной форме.
Таблица перехода
|
X(t) Z |
Z(t+1) |
||
|
a1 |
a2 |
a3 |
|
|
q |
q2 |
q3 |
q4 |
|
q |
q1 |
q2 |
q3 |
|
q3 |
q3 |
q1 |
q2 |
|
q4 |
q4 |
q2 |
q1 |
 (t)
(t)  1
1 2
2
Z(t+1)=f(x(t);z(t))
f(ai, qi)=qj
Таблица выхода
|
X(t) Z(t) |
y(t) |
||
|
a1 |
a2 |
a3 |
|
|
q1 |
y1 |
y2 |
y1 |
|
q2 |
y1 |
y2 |
y2 |
|
q3 |
y2 |
y1 |
y1 |
|
q4 |
y1 |
y2 |
y2 |
y(t)=g(x(t); z(t))
ai=xi/yi
-
В-третьих, таблицы переходов и выходов можно объединить в одну. Содержимое каждой клетки представляет собой дробь: над косой чертой вписывается соответствующее значение из таблицы переходов, под косой чертой – значение из таблицы выходов. Полученная таким образом таблица называется общей таблицей переходов и выходов конечного автомата.
-
Граф автомата (графоид) – это сигнальный граф, вершины которого обозначают состояния автомата, на дугах отражены условия перехода из состояния в состояние и значения выходных сигналов в виде дроби: над косой чертой – x(j), под ней – y(j).
-
Конечный автомат можно также описать с помощью матрицы переходов. Это аналог графа в табличной форме. Она представляет собой квадратную матрицу размерности число состояний число состояний, в которой отражены условия перехода из состояния в состояние аналогично изображённым на графе.
Общее определение конечного автомата:
M = (X, Y, S, δ, λ),
Пример. Рассмотрим диаграмму состояний конечного автомата. Пусть задан конечный автомат M = (Q, Σ, δ, q0, F), где Q = {q0, q1, q2, q 3}, Σ = {0,1}, F = {q0}, δ(q0, 0) = q2, δ(q0, 1) = q1 , δ(q1, 0) = q3 , δ(q1, 1) = q0 , δ(q2, 0) = q0 , δ(q2, 1) = q3 , δ(q3, 0) = q1 , δ(q3, 0) = q2
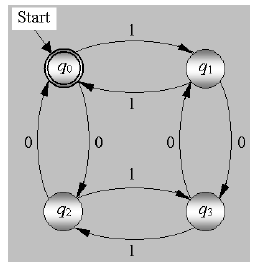
Рисунок 1
Диаграмма состояний конечного автомата состоит из узлов, представляющих состояния, и из ориентированных дуг, определяющих возможные переходы, которые зависят от входных символов. Так, если δ(q, a) = p, то из узла, представляющего состояние q, в узел, представляющий состояние p, проводится дуга, помеченная входным символом a. На рис.1 дана диаграмма состояний конечного автомата M. Двойным кружком выделено единственное в данном примере конечное состояние, которое является одновременно и начальным.
По способу формирования функций выходов выделяют автоматы Мили и Мура. В автомате Мили функция выходов λ определяет значение выходного символа по классической схеме абстрактного автомата. Математическая модель автомата Мили и схема рекуррентных соотношений не отличаются от математической модели и схемы рекуррентных соотношений абстрактного автомата. Таким образом, можно дать следующее определение:
Конечным детерминированным автоматом типа Мили называется совокупность пяти объектов
![]() ,
,
где S, X и Y — конечные непустые множества, а δ и λ — отображения вида:
![]() и
и
![]() со связью элементов множеств S, X и Y в
абстрактном времени T = {0, 1, 2, …} уравнениями:
со связью элементов множеств S, X и Y в
абстрактном времени T = {0, 1, 2, …} уравнениями:
![]()
![]()
(Отображения δ и λ получили названия, соответственно функции переходов и функции выходов автомата A).
Особенностью автомата Мили является то, что функция выходов является двух аргументной и символ в выходном канале y(t) обнаруживается только при наличии символа во входном канале x(t). Функциональная схема не отличается от схемы абстрактного автомата.
Зависимость выходного сигнала только от состояния представлена в автоматах типа Мура. В автомате Мура функция выходов определяет значение выходного символа только по одному аргументу — состоянию автомата. Эту функцию называют также функцией меток, так как она каждому состоянию автомата ставит метку на выходе.
Конечным детерминированным автоматом типа Мура называется совокупность пяти объектов:
![]()
где S, X, Y и δ — соответствуют определению автомата типа Мили, а μ является отображением вида: μ : S → Y, с зависимостью состояний и выходных сигналов во времени уравнением:
![]() .
.
Особенностью автомата Мура является то, что символ y(t) в выходном канале существует все время пока автомат находится в состоянии s(t).