

Практикум по механике и молекулярной физике
.pdfС другой стороны, из рис. 3 видно, что угол α можно записать через длину дуги x и радиус ℓ: α = x/ℓ, т. е. сила, возвращающая маятник в положение
равновесия, является квазиупругой: Рt = − mgA x , где k = mgA – коэффици-
ент квазиупругой силы. Второй закон Ньютона в этом случае будет иметь
следующий вид: |
|
m |
d 2 x |
+ |
mg |
x = 0 . |
|||
|
dt |
2 |
l |
||||||
(7) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
С учетом (4), можно записать, что ω2 = |
g |
, откуда |
Τ = 2π |
A |
. (8) |
||||
A |
g |
||||||||
|
|
|
|
|
|
|
|||
Период колебаний математического маятника при малых углах отклонения не зависит от амплитуды колебания и от его массы, а определяется длиной маятника и ускорением свободного падения g.
Физический маятник
Физическим маятником называется абсолютно твердое тело, которое может совершать колебания под действием силы тяжести
0вокруг горизонтальной оси О, перпендикулярной плоско-
асти рисунка и не проходящей через его центр тяжести. На рис.4 изображено сечение физического маятника плос-
Скостью, перпендикулярной к его оси вращения О и прохо-
P1 ϕ |
|
дящей через его центр тяжести С. |
|
PG |
Запишем в общем виде уравнение движения маят- |
||
|
ника, т. е. основное уравнение динамики вращательного |
||
P |
2 |
движения |
|
|
M = Jβ, |
(9) |
|
Рис.4 |
|
где J – момент инерции маятника относительно горизон- |
|
|
|
тальной оси О, β – угловое ускорение, М – момент внеш- |
|
них сил. В нашем случае момент внешних сил обусловлен действием силы тяжести. Очевидно, что на каждый элемент массы mi маятника действует сила тяжести mig, создающая определенный момент относительно оси О. Сумма моментов этих силы равна моменту равнодействующей сил тяжести, которая приложена к центру тяжести маятника (точка С).
Докажем, что маятник, выведенный из положения равновесия на малый угол φ, будет совершать гармонические колебания. Для этого равнодействующую сил тяжести P = mg разложим на две составляющие, одна из которых P2 уравновешивается реакцией опоры, а под действием другой составляющей P1=Psinφ маятник приходит в движение. Обозначим расстояние от точки подвеса О до центра тяжести С через a. Тогда уравнение дви-
жения маятника (9) запишется в виде |
|
Jβ = –P1·a = –P·a·sinφ. |
(10) |
21
Знак минус показывает, что сила P1 направлена к положению равновесия и
приводит к уменьшению угла отклонения φ. Так как β = d 2ϕ , а для малых dt 2
углов φ можно принять sinφ ≈ φ, то уравнение (10) будет иметь вид:
J |
d 2ϕ |
+ mgaϕ = 0, |
или |
d 2ϕ |
+ |
mga |
ϕ = 0 . |
(11) |
|
dt2 |
dt 2 |
J |
|||||||
|
|
|
|
|
|
Частным решением этого дифференциального уравнения является уравнение
φ = Αcosωt, где ω = |
mga |
. Исходя из полученного выражения для ω, на- |
||||
|
J |
|
|
|
|
|
ходим выражение для периода колебаний физического маятника |
|
|||||
|
|
Τ = π J |
= π Aпр . |
(12) |
||
|
|
2 |
mga |
2 |
g |
|
|
|
|
|
|
||
Величина Anp = maJ называется приведенной длиной физического маятни-
ка, это есть длина эквивалентного математического маятника, имеющего тот же период колебаний, что и данный физический маятник.
Физическим маятником также можно воспользоваться для определения ускорения свободного падения.
Любой физический маятник обладает свойством сопряженности, которое заключается в том, что в нем можно найти такие две точки, что при последовательном подвешивании маятника за ту или иную из них период колебаний его остается одним и тем же. Расстояние между этими точками определяет собой приведенную длину физического маятника.
Разновидностью физического маятника является оборотный маятник, который обладает свойством сопряженности центра качания и точки подвеса. Центром качания называется точка, находящаяся на расстоянии приведенной длины Anp от оси вращения. Приведенная длина всегда
больше величины a (см. рис. 4), т. е. центр качания всегда лежит ниже центра тяжести. Действительно, по теореме Штейнера момент инерции маятника относительно оси вращения равен J = Jo + ma2, где Jo – момент инерции маятника относительно оси, проходящей через центр тяжести. Тогда
приведенная длина ℓпр равна Anp = maJ = J0 +mama2 = a + maJo , т. е. Anp > a.
22

|
|
|
|
РАБОТА № 2–1 |
||
ИССЛЕДОВАНИЕ ЗАКОНОВ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ |
||||||
|
МАТЕМАТИЧЕСКОГО И ОБОРОТНОГО МАЯТНИКА |
|||||
|
НА УСТАНОВКЕС ЭЛЕКТРОННЫМ СЕКУНДОМЕРОМ |
|||||
|
Приборы и принадлежности: установка, состоящая из двух маятни- |
|||||
ков – математического и оборотного, масштабная линейка. |
||||||
|
|
Описание экспериментальной установки |
||||
|
Общий вид установки представлен на рис. 5. Основание 1 оснащено |
|||||
регулируемыми ножками 2, которые позволяют провести выравнивание |
||||||
прибора. В основании закреплена колонка 3, на которой зафиксирован |
||||||
верхний кронштейн 4 и нижний кронштейн 5 с фотоэлектрическим датчи- |
||||||
ком 6. После отвинчивания винта 11 верхний кронштейн можно поворачи- |
||||||
вать вокруг колонки. Затягивание винта 11 фиксирует кронштейн в любом, |
||||||
произвольно избранном положении. С одной стороны кронштейна 4 нахо- |
||||||
дится математический маятник 7, с другой – оборотный маятник 8. Длину |
||||||
математического маятника можно регулировать при помощи винта 9, ее |
||||||
величину определять при помощи шкалы на колонке 3. |
||||||
|
Оборотный маятник выполнен в виде стального стержня 8, на кото- |
|||||
ром могут перемещаться и закрепляться в различных положения две опор- |
||||||
ные призмы П1 и П2 и тяжелые чечевицы А1 и А2. Используемый в работе |
||||||
маятник позволяет перемещать опорную призму только через 10 мм. |
||||||
На таком расстоянии друг от друга |
на стержне нанесены кольцевые ка- |
|||||
навки. С их помощью положение чечевиц и опорных призм фиксируется |
||||||
на стержне зажимными винтами. Так как расстояние между призмами из- |
||||||
|
|
9 |
4 |
П1 |
меняется не непрерывно, а через 10 |
|
|
|
|
|
|
мм, то при определении приведенной |
|
|
|
|
|
1 |
длины маятника добиться совпадения |
|
|
|
|
|
периодов маятника Т1 и Т2 (см. ниже) |
||
|
|
|
|
А |
невозможно. |
|
|
|
|
|
3 |
|
Нижний кронштейн 5 вместе с фо- |
|
|
|
|
тоэлектрическим датчиком 6 можно |
||
|
|
|
|
8 |
перемещать вдоль колонки и фиксиро- |
|
|
|
7 |
|
П2 |
вать в произвольно выбранном поло- |
|
|
|
|
6 |
|||
|
|
|
жении. |
|||
|
|
|
|
|||
|
|
|
|
|
|
Когда колеблющийся маятник (ма- |
10 |
|
|
|
|
тематический или оборотный) пересе- |
|
2 |
|
|
|
кает световой луч, падающий на фото- |
||
1 |
Рис. 5 |
|
5 |
транзистор, то в цепи фототранзистора |
||
|
|
|
|
|
генерируются электрические импуль- |
|
сы. Специальная электронная схема считает число импульсов и выдает на |
||||||
световой индикатор информацию о числе полных колебаний маятника. |
||||||
Одновременно электронный секундомер 10 ведет отсчет времени и резуль- |
||||||
23

тат фиксируется на световом индикаторе. Схема управления осуществляет синхронное включение и выключение счетчика колебаний и секундомера. Зная число колебаний маятника и время, за которое они совершаются, можно определить период колебания маятника.
Выполнение работы
Проверьте, заземлен ли прибор. Включите сетевой шнур в сеть 220 В. Нажмите выключатель «СЕТЬ», при этом индикаторы измерителя показывают нуль и горит лампочка фотоэлектрического датчика. Прибор готов к работе.
Упражнение 1. Изучение законов колебательного движения
математического маятника и определение ускорения свободного падения
Нижний кронштейн вместе с фотоэлектрическим датчиком установите на отметке 50 см. Затяните винт, фиксируя фотоэлектрический датчик
визбранном положении. С помощью верхнего кронштейна поместите над датчиком математический маятник. Вращая винт на верхнем кронштейне, опустите шарик математического маятника до нижнего кронштейна, обращая внимание на то, чтобы черта на шарике была продолжением черты на корпусе фотоэлектрического датчика. Таким образом устанавливается длина математического маятника.
1.Проверка зависимости периода колебаний от его длины и амплитуды.
Для этого приведите маятник в колебательное движение, отклонив шарик от положения равновесия на 4–50. Нажмите кнопку «СБРОС». После отсчета измерителем 15–20 полных колебаний нажмите кнопку «СТОП». Определите период колебаний маятника по формуле T = t/n, где n – число колебаний, t – показание электронного секундомера. Измерения периода проводятся не менее трех раз. Изменяя длину маятника на 2–3 см
водну и другую сторону, проведите аналогичные измерения для других длин маятника. Данные измерений занесите в таблицу.
№ |
l1 = .... |
l2 = .... |
l3 = .... |
п/п |
n t, c T1, c T1,c n |
t,c T1,c T1, |
n t,c T1,c T1,c |
|
|
c |
|
1
2
3
Cp
Не меняя длину маятника, определите периоды колебания маятника при разных амплитудах колебания А. Измерения также проводятся не ме-
24
нее трех раз для каждой амплитуды. Составьте таблицу, аналогичную предыдущей, и все данные занесите в эту таблицу.
Сделайте вывод, как зависит период колебаний математического маятника от его длины и амплитуды.
2. Используя имеющиеся усредненные данные для периода колебаний, по формуле (8) определите ускорение свободного падения g.
С целью оценки погрешности g выведите формулу для расчета абсолютной и относительной ошибки измерения и определите их ( l = 2мм, аТберется из эксперимента).
Упражнение 2. Определение ускорения свободного падения при помощи оборотного маятника
Положение на стержне физического маятника чечевиц и одной из опорных призм П2 указывается преподавателем. Крепление всех деталей на стержне следует производить очень тщательно, добиваясь, чтобы зажимные винты входили в канавки на стержне. При изменении положения чечевицы или опорных призм маятник надо снять с кронштейна, положить на стол и провести перемещения чечевиц или призмы.
Установите маятник на призму П1. Нижний кронштейн вместе с фотоэлектрическим датчиком переместите таким образом, чтобы стержень маятника пересекал оптическую ось датчика.
Отклоните маятник на 4–50 от положения равновесия и дайте возможность ему совершать колебания.
Нажмите кнопку «СБРОС» и после подсчета измерителем 15–20 полных колебаний нажмите кнопку «СТОП». Определите период колебаний оборотного маятника по формуле T1 = t1/n1, где n1 – число колебаний, t1 – показание электронного секундомера. Результаты заносятся в таблицу.
n1 |
t1, c |
T1, c |
l, cм |
n2 |
t2., с |
T2, с |
Lпр |
g, см/с2 |
|
|
|
|
|
|
|
|
|
Затем маятник снимается с кронштейна, переворачивается и устанавливается на призму П2. Снова определяются значения n2, t2 и вычисляются значения T2. Измеряется и вносится в таблицу расстояние l между опорными призмами маятника.
Переместите призму П2 на соседнее деление в таком направлении, чтобы Т2 по своему значению приближался к значению Т1. Определяют и заносят в таблицу новые значения l, n2, t2, T2. Эти измерения повторяются до 4–5 раз, пока значение периода Т1 не попадет в «вилку» полученных значений Т2 (значения Т1 и Т2 не должны отличаться более чем 0,5 %).
При равенстве Т1 и Т2 определите приведенную длину маятника как расстояние между ребрами опорных призм и вычислите ускорение свободного падения по формуле (12).
25

Используя соотношение (13), можно, зная lпр, массу маятника (m = 2,6 кг), определить момент инерции маятника J и величину а, т. е. положение центра тяжести мятника (см. рис. 4).
РАБОТА № 2–2 ПРОВЕРКА ЗАКОНОВ КОЛЕБАНИЯ МАТЕМАТИЧЕСКОГО
МАЯТНИКА И ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ
Приборы и принадлежности: математический маятник, секундомер, штангенциркуль.
Описание установки
В качестве математического маятника в работе используется тяжелый металлический шарик 1, подвешенный на длинной тонкой нити (рис. 6).
Длина нити может меняться путем перемещения крепящего кронштейна 2 вдоль нити и измеряется по шкале 3, амплитуда колебаний маятника измеряется по шкале 4.
При выполнении данной работы необходимо определение длины математического маятника и его периода колебаний.
Длина математического маятника ℓ находится как сумма длины нити ℓ1 от положения кронштейна до шарика (измерения проводятся по милли-
|
|
|
|
|
|
|
|
метровой шкале) и радиуса шарика r = d/ℓ |
(измерения прово- |
|||
|
|
|
|
|
|
|
|
дятся с помощью штангенциркуля). Таким образом, длина |
||||
|
|
|
|
|
|
|
|
математического маятника будет равна: ℓ=ℓ1+d/2 (1) |
|
|||
|
|
|
|
|
|
|
|
Период колебаний определяется секундомером и его |
||||
|
|
|
|
3 |
|
время рассчитывается из 20-30 полных колебаний маятника |
||||||
|
|
|
|
|
|
|
|
по формуле T = t/n |
(2), где t – время n полных колебаний |
|||
2 |
|
|
|
|
|
|
Целью работы является изучение зависимости периода |
|||||
|
|
|
|
|
4 |
колебаний математического маятника от длины и амплитуды |
||||||
|
|
|
|
колебаний. Как следует из теории математического маятника, |
||||||||
|
|
|
|
|
|
|
|
период его колебаний определяется по формуле |
|
|||
|
|
|
|
|
|
|
|
|
|
|
Τ = 2π |
A |
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
|
g . |
|
|
|
|
|
|
|
|
|
|
||||
Рис. 6 |
(3) |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда, очевидно, для разных длин маятника A1 и A2 |
будет справедливо |
|||||||||||
соотношение: |
Τ1 = |
A1 . |
(4) |
|
||||||||
|
|
|
|
|
|
|
|
|
Τ2 |
A2 |
|
|
Для проверки этого соотношения кронштейном 2 установите длину маятника 140–150 см и определите его период колебаний. Затем, передвигая кронштейн, уменьшите длину маятника вдвое и опять определите период колебаний. Измерения проводятся не менее трех раз и данные заносятся в таблицу.
26

№ |
n |
t |
A1=… |
T , |
n |
t |
A2 =… |
T , c |
Τ1 |
A1 |
п/п |
, c T , c |
, c T , c |
Τ |
A2 |
||||||
|
|
1 |
1 |
1 |
|
2 |
2 |
2 |
||
|
|
|
|
c |
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Не запол- няется |
Не запол- няется |
|
2 |
|
|
|
|
|
|
|
|
||
3 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Ср. |
|
|
|
|
|
|
|
|
|
|
Сделайте вывод о характере зависимости периода колебаний математического маятника от его длины.
Для проверки зависимости периода колебаний от амплитуды колебаний установите фиксированную длину маятника, отклоните шарик примерно на 5 см и определите период его колебаний. Удвойте амплитуду колебаний и снова определите период колебаний. Для каждой амплитуды А период колебаний Т рекомендуется определять не менее трех раз, а затем вычислить среднее значение. Максимальное значение амплитуды не должно превышать 20–25 см. Составьте таблицу, аналогичную предыдущей, все данные занесите в эту таблицу и на основании полученных результатов сделайте вывод о характере зависимости периода колебаний математического маятника от амплитуды его колебаний.
При определении ускорения свободного падения необходимо учитывать следующее. Так как длиной математического маятника является расстояние от точки подвеса до его центра тяжести, а центр тяжести лабораторного математического маятника не совпадает точно с геометрическим центром шарика, то непосредственное точное измерение длины не представляется возможным. Поэтому при определении ускорения свободного падения наблюдают колебания маятника для разных длин ℓ1 и ℓ2, определяя Т1 и Т2 , и находят g по формуле, полученной из (3):
g |
= π 2 |
(A2 |
− |
2 |
− |
2 |
). |
(5) |
4 |
|
A1) (T2 |
|
T1 |
|
Расстояния ℓ1 и ℓ2 и соответствующие им значения Т1 и Т2 можно взять из проделанных выше опытов.
С целью оценки погрешности вычисления ускорения свободного падения выведите формулу для расчета абсолютной и относительной ошибок измерения и определите их ( A = 2 мм, а ΔΤ берется из эксперимента).
Контрольные вопросы
1.Какой колебательный процесс называется гармоническим и каково его аналитическое и графическое представление?
2.Перечислите характеристики гармонического колебания, определите их физический смысл.
3.По какому закону изменяются при гармонических колебаниях смещение, скорость и ускорение?
4.От каких величин зависит ускорение свободного падения?
27

3. ЗАТУХАЮЩИЕ КОЛЕБАНИЯ
Простейшим видом колебательного движения является гармоническое, которое совершается по закону синуса или косинуса. Оно возникает в том случае, если на тело, выведенное из положения равновесия, непрерывно действует сила, направленная всегда к положению равновесия, а по величине пропорциональная смещению этого тела от положения равновесия.
Колебательные движения системы имеют особенно простой характер в случае малых колебаний, когда мало смещение системы от положения равновесия. Примером простейших колебательных систем может слу-
|
жить небольшое тело (шарик), подвешенное на пру- |
|
|
жине или нити (математический маятник). |
|
|
Если колебательное движение происходит в |
|
-x |
какой-либо внешней среде, то эта среда оказывает |
|
0 |
сопротивление движению, стремясь замедлить его. |
|
+x |
Такой процесс движения можно описать, если вве- |
|
сти дополнительную силу, появляющуюся в резуль- |
||
|
||
Рис. 1 |
тате самого движения и направленную противопо- |
|
|
ложно ему. Такой силой является сила трения. |
Рассмотрим такое колебательное движение шарика, подвешенного на упругой пружине (рис. 1).
После отклонения шарика от положения равновесия он будет совершать гармонические колебания. Если деформация пружины невелика, то можно считать справедливым закон Гука и записать выражение для возвращающей в равновесие шарик силы F в виде: F = −kx , (1) где k – коэффициент пропорциональности, зависящий от упругих свойств пружины, x – смещение относительного положения равновесия. Знак минус показывает, что сила направлена к положению равновесия, т. е. имеет знак, обратный знаку x. Под влиянием этой силы предоставленный самому
себе шарик начнет двигаться, приобретая скорость V = dxdt . При его движе-
нии возникает сила трения Fтр, направленная противоположно скорости. В первом приближении ее можно считать пропорциональной скорости ша-
рика: |
Fтр |
= −r |
dx |
, |
(2) |
|
|||||
|
|
|
dt |
|
|
где r – коэффициент пропорциональности, называемый коэффициентом сопротивления (коэффициент трения).
Если масса шарика невелика (это дает возможность пренебречь силой тяжести по сравнению с возникающими упругими силами), то второй
закон Ньютона будет иметь вид: |
|
d 2 x |
|
dх |
. |
(3) |
|
m dt 2 |
= −kx − r dt |
|
|||
28
После преобразований |
d 2 x |
r dx |
|
k |
|
|
|
|
Или |
|
d 2 x |
dx |
2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
dt2 + m dt |
+ m x = |
0. |
|
|
dt2 + 2δ |
dt +ω0 x = 0. |
||||||||||||||||||||
(4) |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Здесь ω02 = |
– квадрат собственной частоты колебаний шарика, т. е. коле- |
|||||||||||||||||||||||||
m |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|||
баний при отсутствии сил трения и других внешних сил; 2δ = |
, |
где δ |
||||||||||||||||||||||||
|
||||||||||||||||||||||||||
называется коэффициентом затухания. |
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Уравнение (4) есть дифференциальное уравнение затухающих коле- |
|||||||||||||||||||||||||
баний, и решение которого имеет вид |
|
|
x = A |
|
e−δt |
cos ωt . |
|
|
|
(5) |
||||||||||||||||
|
А0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|||
Здесь |
– |
амплитуда |
колебаний |
|
в |
|
начальный |
|
момент |
|
времени; |
|||||||||||||||
ω = |
ω02 −δ 2 |
– циклическая частота затухающих колебаний, е – основа- |
||||||||||||||||||||||||
ние натурального логарифма (е = 2,71). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
А период колебаний Т будет |
2π |
|
|
|
2π |
|
|
|
|
2π |
|
|
|
|
|
(6) |
||||||||||
|
|
|
|
|
T = |
ω |
= |
ω |
2 |
−δ |
2 |
= |
k |
|
|
r |
2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2m |
|
|
|
|
|
|
|||
В формулу (5) входят два множителя, зависящие от времени. Один cos t – периодическая функция времени, другой е- t убывает с течением времени. Тогда, если коэффициент сопротивления мал, то величину А = А0е– t можно рассматривать как амплитуду, которая с течением времени уменьшается по экспоненциальному закону, окончательно решение уравнения зату-
хающих колебаний можно записать в общем виде: x = A cosωt . |
(7) |
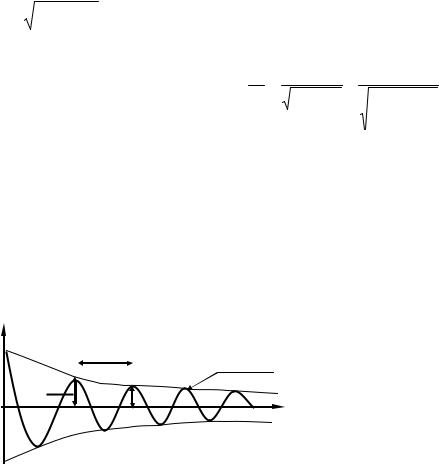
Затухающие колебания представляют собой непериодические колебания, так как в них никогда не повторяются, например, максимальные значения смещения, скорости и
x |
|
Т |
|
|
A e−δ t |
ускорения. Поэтому величины |
||
|
|
|
||||||
|
|
|
|
|
и Т называть частотой и перио- |
|||
|
An |
|
|
|
|
0 |
||
|
|
|
An+1 |
t |
дом можно только условно. |
|||
|
|
|||||||
|
|
|
|
|
|
Графически |
затухающие |
|
|
|
|
|
|
|
|
колебания представлены на рис. |
|
|
|
|
|
Рис. 2 |
|
2. |
|
|
|
|
|
|
|
Из |
формулы |
||
|
|
|
|
|
|
|
||
A = A0 e−δ t , выражающей закон убывания амплитуды колебаний, можно
показать, что отношение амплитуд, отделенных друг относительно друга интервалом в один период Т, остается постоянным в течение всего процесса затухания.
Итак, возьмем отношение двух амплитуд Аn и An+1 (см. рис. 2)
D = |
A |
= |
A |
e−δ t |
= |
1 |
= e |
δ T |
. |
(8) |
A |
A |
e−δ (t +T) |
e−δ T |
|||||||
|
n |
|
0 |
|
|
|
|
|
|
|
|
n +1 |
|
0 |
|
|
|
|
|
|
|
29

Величина D называется декрементом затухания. Чем больше декремент затухания, тем скорее уменьшается амплитуда. Чаще затухающие колебания характеризуются логарифмическим декрементом затухания :
θ = ln D = ln |
An |
= ln eδT = δT , или = Т. |
(9) |
|
|||
|
An+1 |
|
|
Таким образом, для характеристики затухающих колебаний вводятся две величины: коэффициент затухания и логарифмический декремент затухания . Поясним их физический смысл.
Обозначим через промежуток времени, за который амплитуда ко-
|
A0 |
δτ |
|
|
1 |
|
|
лебаний уменьшится в е раз. Тогда |
|
=e |
=e, откуда = 1 или δ |
= |
|
. |
|
Aτ |
|||||||
τ |
Следовательно, коэффициент затухания есть физическая величина обратная промежутку времени , в течение которого амплитуда убывает в е раз. Величина называется временем релаксации.
Если, например, = 102 с, то это значит, что амплитуда колебаний убывает в е раз за время 102 с.
Пусть n – число колебаний, после которых амплитуда уменьшается в е раз. Тогда = nT и = Т= 1/ = 1/n.
Следовательно, логарифмический декремент затухания есть физическая величина, обратная числу колебаний n, по истечении которого амплитуда убывает в е раз.
Если, например, = 0,01, то это значит, что амплитуда колебаний убывает в е раз по истечении 100 колебаний.
РАБОТА № 3–1
ОПРЕДЕЛЕНИЕ ЛОГАРИФМИЧЕСКОГО ДЕКРЕМЕНТА ЗАТУХАНИЯ И КОЭФФИЦИЕНТА ЗАТУХАНИЯ КРУТИЛЬНЫХ КОЛЕБАНИЙ
Приборы и принадлежности: прибор для наблюдения упругих (крутильных) колебаний, секундомер.
6 |
4 |
5 |
|
|
1 |
7 |
|
|
8 |
9 |
|
|
3 |
||
2 |
|
|
|
|
|
|
|
|
Рис. 3 |
|
|
Описание прибора
Прибор для наблюдения затухающих колебаний (рис. 3) состоит из металлической проволоки 1, верхний конец которой закреплен. На ее нижнем конце подвешен груз 2, центр тяжести которого расположен на продолжении оси проволоки; выше груза на его оси вращения закреплено зеркальце 3. Если груз повернуть на некоторый угол около вертикальной оси, то проволока закручивается и в ней появляются упругие силы. Вследствие этого система, предоставленная сама себе, начина-
30