

matmod
.pdfЛ.5. Построение математической модели
Z b
f (y) = F (x, y(x), y′(x))dx → min, y(a) = ya, y(b) = yb,
a
Пусть функция F определена для всех значений своих аргументов и имеет непрерывные производные. В этих предположениях функция y, на которой функционал принимает экстремальное значение, является стационарной точкой функционала f .
Варьирование функции y приводит к уравнению Эйлера:
Fy′ − dxd Fy′ ′ = 0.
Получаем краевую задачу для дифференциального уравнения второго порядка.
В некоторых довольно редких случаях эту задачу удается решить точно. Чаще применяются прямые методы, с помощью которых приближенное решение задачи на экстремум функционала сводится к аналогичной задаче с конечным числом степеней свободы. 


2014 71 / 74

Л.5. Построение математической модели |
|
|
|
Задачи оптимального управления |
|
||
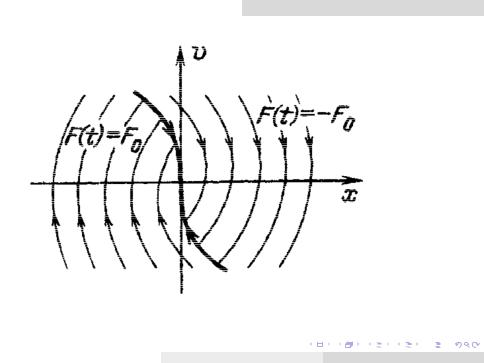
Пример. Пусть вдоль оси x движется материальная точка массы m |
|||
под действием внешней управляемой силы F (t) (|F (t)| ≤ F0). |
|||
Требуется так выбрать внешнюю силу, чтобы за кратчайшее время |
|||
(“задача о быстродействии”) точка пришла в начало координат x = 0 и |
|||
там остановилась. |
|
|
|
|
mx¨(t) = F (t), |
|F (t)| ≤ F0, |
0 ≤ t ≤ T , |
x(0) = x0, |
x˙ (0) = v0, x(T ) = x˙ (T ) = 0, |
T → min . |
|
Решение. |
|
|
|
Если при t = 0: |
|
|
|
|
2F0x(t) + mx˙ (t)|x˙ (t)| > 0, |
|
|
то надо полагать F (t) = −F0, пока неравенство не обратится в |
|||
равенство. После этого переключить F (t) на противоположное крайнее |
|||
значение и ожидать прихода точки в начало координат, после чего |
|||
отключить силу. |
|
|
|
2014 |
72 / 74 |
Л.5. Построение математической модели
жирная линия: 2F0x(t) + mx˙ (t)|x˙ (t)| = 0
2014 |
73 / 74 |

Л.5. Построение математической модели
Одна из общих форм задач оптимального управления:
x˙1(t) = g1(t, x1, x2, . . . , xn, u1, u2, . . . , um),
. . . . . . . . .
x˙n(t) = gn(t, x1, x2, . . . , xn, u1, u2, . . . , um),
x1(t0) = x10, x2(t0) = x20, . . . , xn(t0) = xn0,
x1(T ) = x1T , x2(T ) = x2T , . . . , xn(T ) = xnT .
Функции xi (t) (i = 1, . . . , n) задают эволюцию системы, функции uj (t) (j = 1, . . . , m) – управление, стесненное заданными ограничениями, например, вида
|uj (t)| 6 uj0.
Требуется так подобрать управление, чтобы минимизовать функционал, например, вида
Z T
f (x, u) = ϕ(t, x1(t), . . . , xn(t), u1(t), . . . , um(t))dt → min .
t0
2014 |
74 / 74 |