

method_statics
.pdfФ Е Д Е РАЛ Ь Н О Е АГ Е Н TС ТВ О П О О БРАЗО В АН И Ю
В О РО Н Е Ж С КИ Й Г О С У Д АРС ТВ Е Н Н Ы Й У Н И В Е РС И ТЕ Т
Решениезадач п отеоретич еской механике. Часть1. С татика.
Уч ебно-методич ескоеп особие. 2-еизданиестереотип ное
Составител и: ЧеботаревА.С .
Щ егл ова Ю .Д .
ВО РО Н Е Ж
2006
2
У тверж денонауч но-методич еским советом ф акул ьтета П М М
(21.02.05, п ротокол № 6)
Д оп ущ еноуч ебно-методич еским советом п оп рикл адной математикеи инф орматикедл я студентоввы сшихуч ебны хзаведений, обуч аю щ ихся п о сп ец иал ьности010200 « П рикл адная математика иинф орматика» ип о нап равл ению 510200« П рикл адная математика иинф орматика»
У ч ебно-методич ескоеп особиеп одготовл енона каф едреТеоретич еской и п рикл адной механики ф акул ьтета П М М В оронеж ского государственного университета. Рекомендуется дл я студентов 2 курса сп ец иал ьности 010501 (010200) « П рикл адная математика и инф орматика», п о дисц ип л ине Е Н .Ф .03.1. « Теоретич еская механика».
|
3 |
|
|
О главле н ие . |
|
В ведение. |
4 |
|
§ 1. О сновны еп онятия механики. М еханич ескиемодел и. |
5 |
|
§ 2. Кл ассиф икац ия векторов. |
6 |
|
§ 3. С татика. Аксиомы статики. |
8 |
|
§ 4. П римеры действия сил встатике. |
9 |
|
§ 5. С вободны е, несвободны етел а. В иды свя зей иихреакц ии. |
12 |
|
§ 6. |
У сл овия равновесия системы сил . |
18 |
§ 7. |
П римеры . |
20 |
§ 8. |
Контрол ьны евоп росы дл я самоп роверкиостаточ ны хзнаний. |
35 |
§ 9. Задания домашней контрол ьной работы . |
36 |
|
§ 10. С п исокзадач дл я самостоятел ьногорешения. |
41 |
|
Л итература. |
42 |
|
4
Вве д е н ие .
У ч ебно-методич еское п особие п редназнач ено дл я студентов сп ец иал ьности 010501 (010200) “П рикл адная математика и инф орматика”,
обуч аю щ ихся на втором курседневногоотдел ения |
третьем курсевеч ернего |
отдел ения , п одисц ип л инеЕ Н .Ф .03.1. “Теоретич еская механика”. |
|
С огл асно уч ебному п л ану аудиторны езаня тия |
п о данной дисц ип л ине |
вкл ю ч аю т2 ч аса л екц ий и 2 ч аса п рактич ескихзанятий в недел ю , в теч ение одного семестра. В то ж евремя , объем самостоятел ьной работы отводимой на освоениеп редмета составл яет 68 ч асов (72 ч аса в/о). П редл агаемы й уч ебно-методич еский материал п озвол я етстудентам индивидуал ьноизуч ить
один из раздел ов теоретич еской механики |
– статику. О п редел ения, |
п ол ож ения ип остул аты , вводящ иеся в статике, |
затем активноисп ол ьзую тся |
в динамике– основном раздел етеоретич еской механики. П особиевкл ю ч ает теоретич ескиеосновы оп редел ения связей и ихреакц ий, гл авного вектора и гл авного момента системы сил , уравнениеравновесия дл я общ его и всех ч астны х сл уч аев; и п рактич еские п римеры в виде решения наибол ее тип ич ны хзадач статики.
Так ж ев п особии содерж ится сп исок воп росов дл я самоконтрол я и п ереч еньзадач дл я самостоя тел ьногорешения .
И тогом изуч ения |
статики дл я студентов ф акул ьтета П М М я вл я ется |
решение контрол ьной |
работы , варианты которой п риводя тся в п особии, |
наря ду с разбором тип ич ной задач ип одобногорода.
|
5 |
§ 1. О с н овн ы е пон ятия м е хан ик и. М |
е хан иче с к ие м од е ли. |
О с н овн ы е пон ятия м е хан ик и. |
|
Т еорет ич еск ая м еханик а – |
это ч асть ф изики, которая изуч ает |
механич ескоедвиж ениеимеханич ескоевзаимодействиематериал ьны хтел. М еханич еск ое движ ение – п еремещ ениетел относител ьно друг друга
в п ространствеивремени. |
|
|
|
|
|
|
|
|
М еханич еск ое взаим одейст вие |
– |
действие тел друг на |
друга, в |
|||||
резул ьтатекоторого п роисходитл ибо изменениедвиж ения |
этих тел л ибо |
|||||||
изменениевзаимногоп ол ож ения ихч астиц (деф ормац ия ). |
|
|
|
|||||
Зад ача м е хан ик и: |
состоит в |
|
оп исание объективны х |
законов |
||||
механич еских ф орм движ ения |
материи |
и их изуч ения |
с тем, |
ч тобы |
||||
объяснитьип редсказатьконкретны едвиж ения материал ьны хобъектов. |
||||||||
В основе кл ассич еской |
механики л еж ат сл едую щ ие |
п оня тия : |
||||||
движ ущ ая ся материя (материал ьны етел а), п ространство и время , |
масса как |
|||||||
мера инертности материал ьны х тел |
и сил а |
как мера |
механич еского |
|||||
взаимодействия меж ду тел ами. |
|
|
|
|
|
|
|
|
М |
е хан иче с к ие м од е ли. |
|
|
|
||||
М атериал ьны е тел а |
в |
теоретич еской |
механике |
п редставл яю тся |
||||
п ростейшимимодел я ми: |
|
|
|
|
|
|
|
|
м ат ериальная т оч к а – тел о, конеч ной массы , размерами которого мож но п ренебреч ь; сист ем а м ат ериальных т оч ек – совокуп ность нескол ьких тел, каж доеиз
которы х мож но сч итать материал ьной точ кой, п ри этом движ ение и п ол ож ениекаж дой точ кизависитотдвиж ения ип ол ож ения остал ьны хточ ек; абсолют но т вердое т ело (в дал ьнейшем АТТ) – система материал ьны х точ ек, расстояние меж ду которы ми не меня ется п ри п роизвол ьны х п еремещ ения хэтой системы ;
сист ем а абсолют но т вердых т ел.
В сеф изич ескиетел а п од вл иянием п рил ож енны х сил изменя ю тсвою ф орму, п рич ем вел ич ина деф ормац ии зависит от разл ич ны х усл овий: материал а, ф ормы , вел ич ины и нап равл ения сил ы , темп ературы и т.д. Ж идкость и газ л егко деф ормируется , тверды етел а (метал л , дерево, и др.) незнач ител ьно. В строител ьном дел е, машиностроении и других обл астях техники тел а и нагрузки вы бираю ттак, ч тобы возмож ны едеф ормац ии не вы ходил иза огранич енны еп редел ы , отсю да сл едуеттребование(уп рощ ение)
–недеф ормируемостьтел , ивозникаетестественная абстракц ия АТТ.
Основной кол ич ественной мерой механич еского взаимодействия тел,
характеризую щ ей интенсивность и нап равл ение этого взаимодействия , явл яется сил а.
П онятия |
сил ы зародил ось из оп ы тны х п редставл ений о давл ении |
одного тел а |
на другое п ри неп осредственном их соп рикосновении, о |
п риведении тел а в движ ениеп ри п омощ и каната и ры ч ага, п отом обобщ ено на сил ы , возникаю щ ие п ри уп ругом деф ормировании тел, на взаимное
6
притяж ениенебесны хтел, взаимодействиеэл ектрич ески заряж енны хч астиц ит.д.
Сил а изменя етдвиж ениетел а, характер движ ения зависитотстеп ени
податл ивости тел а ил и отстеп ени инертности тел а. Чем бол ьшеинертность тел а, тем медл еннееизменяется егодвиж ениеп оддействием данной сил ы , и
наоборот. М ерой инертности материал ьного тел а явл яется |
его масса, |
завися щ ая откол ич ества вещ ества. |
|
Д виж ение тел п роисходит в п ространстве с теч ением |
времени. В |
кл ассич еской механикедвиж ениемедл енноеп о сравнению со скоростью света.
П ространство и время в теоретич еской механике п ринимаю тся абсол ю тны ми:
прост ранст во – трехмерноеЕ вкл идово, однородноеиизотроп ное, врем я одинаково во всехточ ках п ространства и дл я всех тел независимо от ихдвиж ения .
Д л я оп редел ения п ол ож ения движ ущ егося тел а (ил иточ ки), с тел ом, п о отношению к которому изуч ается движ ение, ж естко свя зы ваю ткакую -л ибо систему координат, которая вместес тел ом образуетсистему отсч ета. О тсч ет
времени ведется отнекоторогомомента, |
которы й п ринимается за нач ал ьны й |
|||||||
и обознач ается |
t0 . М омент времени t |
оп редел я ется |
ч исл ом |
секунд, |
||||
п рошедшихп осл енач ал ьногомомента. |
|
|
|
|
|
|||
П ромеж утоквремени– эторазностьдвухмоментов. |
|
|
||||||
О сновны ми единиц ами измерения в системеС И явл яю тся : |
единиц а |
массы |
||||||
[m]=к г, |
дл ины [ |
l ]=м етр , времени [ |
t |
]=сек ун д а . С ил а в системе С И |
||||
измеря ется вН ью тонах, п риэтом Н = |
|
× м |
. к г |
|
|
|
||
с 2 |
|
|
|
|||||
|
|
|
|
|
|
|
||
О |
с н овн ы е разд е лы те оре тиче с к ой м е хан ик и: |
|
|
|||||
ст ат ик а изуч аетзаконы иусл овия равновесия материал ьны хобъектов; |
||||||||
к инем ат ик а изуч ает геометрич ескую |
сторону движ ения без |
п рич ин, |
||||||
вы звавшихэтодвиж ениеибезуч ета массы (свойства инертности); |
|
|||||||
динам ик а изуч аетдвиж ениес уч етом п рич ин, |
вы звавших движ ениеи с |
|||||||
уч етом массы . |
|
|
|
|
|
|
|
|
|
|
§ 2. Клас с ифик ация ве к торов. |
|
|
||||
В |
зависимости от свойств ф изич еских |
вел ич ин, |
изображ аемы х |
|||||
векторами, векторы раздел я ю тся на: |
|
|
|
|
|
|||
1) свободны е(ил инесвя занны е), |
|
|
|
|
|
|||
2) |
скол ьзя щ ие (ил и свя занны е с |
п рямой, |
вдол ь которой нап равл ен |
|||||
|
вектор), |
|
|
|
|
|
||
3) |
неп одвиж ны е ил и п рил ож енны е (свя занны е с |
точ кой |
своего |
|||||
п рил ож ения ). |
|
|
|
|
|
|
|
|
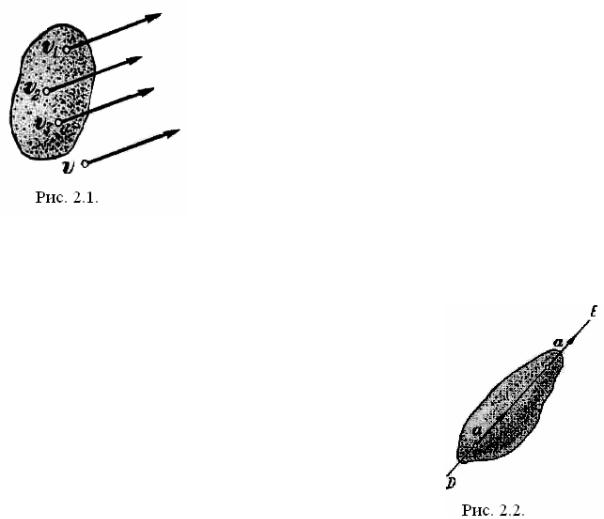
С вободны й |
вектор изображ аеттакую векторную вел ич ину, |
которая |
||||||
мож етбы тьотнесена к л ю бой точ кеп ространства, нетеря я п ри этом своего
7
п ервонач ал ьногоф изич ескогосмы сл а, т.е. вся киедва равны хвектора в этом сл уч ае могут п редставл я ть туж е самую ф изич ескую вел ич ину. Так, нап ример, скоростьп оступ ател ьного движ ения тел а естьсвободны й вектор, п отому ч то она мож етбы тьотнесена к л ю бой точ ке(рис. 2.1.). С вободны й
вектороп редел я ется тремя ч исл ами(своимип роекц ия ми ax , ay и az ). |
|
||||||||
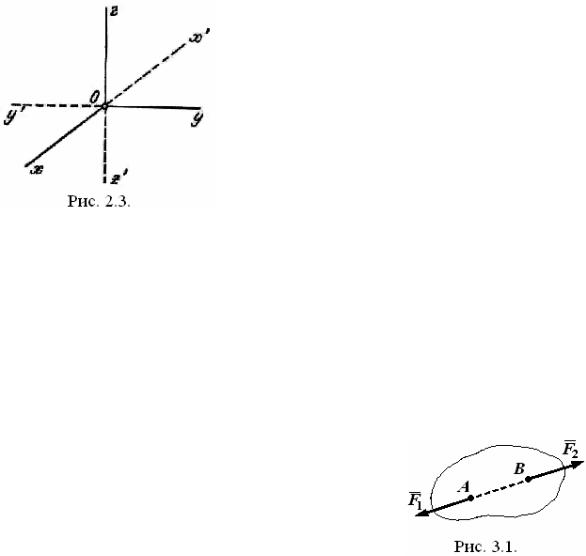
С кол ьзя щ ий |
вектор |
изображ ает |
такую |
||||||
вел ич ину, |
которая , |
не |
теря я |
|
своего |
||||
п ервонач ал ьногоф изич ескогосмы сл а, мож етбы ть |
|||||||||
отнесена к л ю бой из точ ек, |
л еж ащ их на п ря мой |
||||||||
DE, вдол ькоторой нап равл ен вектор, т.е. одну иту |
|||||||||
ж е ф изич ескую |
вел ич ину могут в этом |
сл уч ае |
|||||||
п редставл ять |
тол ько |
те |
векторы , |
которы е |
|||||
одновременно равны |
друг |
другу и нап равл ены |
|||||||
вдол ь одной и той ж еп ря мой; |
эту п ря мую , на |
||||||||
которой л еж итвектор, |
назы ваю тоснованием ил и |
||||||||
л инией |
действия |
вектора (рис. |
2.2.). |
П римером |
|||||
скол ьзя щ его |
вектора |
мож ет |
сл уж ить |
сил а, |
|||||
п рил ож енная |
к |
абсол ю тно твердому |
тел у, ил и |
||||||
угл овая |
скорость. |
Г еометрич ески скол ьзя щ ий |
|||||||
вектороп редел я ется : 1) п ря мой, на которой он л еж ит(основанием вектора);
2) дл иной отрезка, изображ аю щ его вектор; 3) |
стороной |
|||||||||||
ил и нап равл ением |
|
действия |
|
(это |
нап равл ение |
|||||||
обознач ается стрел кой на конц евектора). Анал итич ески |
||||||||||||
скол ьзя щ ий |
вектор |
оп редел я ется |
п я тью |
ч исл ами, |
||||||||
нап ример, тремя |
п роекц иями ax , |
ay , az вектора |
a и |
|||||||||
координатами х1 , |
y1 |
точ ки п ересеч ения |
п ря мой, вдол ь |
|||||||||
которой нап равл енэтотвектор, с п л оскостью Oху. |
|
|
||||||||||
Н еп одвиж ны й |
|
вектор |
изображ ает |
|
такую |
|
||||||
ф изич ескую |
вел ич ину, |
которая |
мож ет бы ть отнесена |
|||||||||
л ишькодной оп редел енной точ кеп ространства итеря ет |
||||||||||||
свое п ервонач ал ьное ф изич еское знач ение, |
будуч и |
|||||||||||
отнесена ко вся кой |
другой |
точ ке п ространства. |
Так, |
|||||||||
скоростьдвиж ущ ейся точ ки п редставл я етсобой вектор, |
||||||||||||
свя занны й с этой точ кой. Н еп одвиж ны й вектор, |
таким образом, оп редел яется |
|||||||||||
шестью ч исл ами: |
тремя |
п роекц ия ми вектора и тремя |
координатами точ ки |
|||||||||
п рил ож ения . |
|
|
|
|
|
|
|
|
|
|
|
|
П ри |
оп ерац иях |
сл ож ения , |
умнож ения |
и |
диф ф еренц ирования |
|||||||
скол ьзя щ иеинеп одвиж ны евекторы рассматриваю тся каксвободны е. |
||||||||||||
Д ругая |
кл ассиф икац ия |
векторов |
основана |
на |
том сущ ественном |
|||||||
разл ич иимеж ду ними, ч тонап равл ениеоднихоп редел я ется неп осредственно п о ф изич ескому смы сл у вел ич ин, которы еэтими векторами изображ аю тся (нап ример, сил а, скорость), тогда как другиеимею тусл овноенап равл ение, которое ф изич еским смы сл ом изображ аемы х ими вел ич ин оп редел яется л ишь косвенно (нап ример, угл овая скорость, момент). П ервы е векторы назы ваю тся п ол ярны ми, а вторы е– аксиал ьны миил иосевы ми.
8
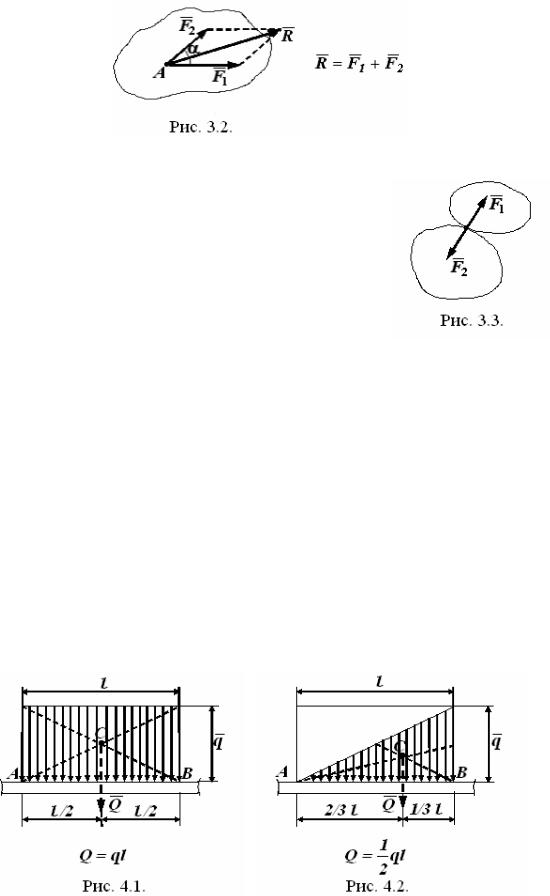
В ы бор нап равл ения аксиал ьного вектора зависит от вы бора п ол ож ител ьногонап равл ения вращ ения , другими сл овами, отвы бора п равой ил и л евой системы координат. П ереход ж еотп равой системы к л евой (ил и
обратно) мож ет бы ть совершен |
п ростой заменой п ол ож ител ьного |
нап равл ения осей на отриц ател ьны е. |
Д ействител ьно, п равая система Oxyz |
п ри заменеп ол ож ител ьны х нап равл ения осей на отриц ател ьны еобразует
п оказанную п унктиром л евую систему координат |
′ ′ ′ |
xкоторая никакими |
||||||
z Oy, |
||||||||
п оворотаминемож етбы тьсовмещ ена с п равой (рис.2.3.). |
|
|
|
|
||||
|
Заметив это, |
л егко |
сообразить, |
ч то |
||||
п роекц ии п ол ярного вектора, |
сохраня ю щ его |
|||||||
свою |
ориентац ию |
в п ространстве, |
п ри замене |
|||||
осей |
на п рямо п ротивоп ол ож ны е изменя ю т |
|||||||
свой знак, тогда какп роекц ииосевы хвекторов, |
||||||||
меня ю щ ихп риэтом своенап равл ениетакж ена |
||||||||
п ротивоп ол ож ное, |
дол ж ны |
будут |
его |
|||||
сохранить. |
Н а основании этого мож но дать |
|||||||
другоеоп редел ениеп ол ярны х и аксиал ьны х |
||||||||
векторов. |
П ол ярны м |
вектором |
назы вается |
|||||
такой |
вектор, |
п роекц ии |
|
которого |
п ри |
|||
изменении нап равл ения координатны х осей |
на п ря мо п ротивоп ол ож ны е |
|||||||
меня ю тсвой знак. Аксиал ьны м вектором назы вается такой вектор, п роекц ии которого п ри изменении нап равл ения координатны х осей на п рямо
противоп ол ож ны енеменя ю тсвой знака.
§3. Статик а. Ак с иом ы .
Основная задач а статики – найти необходимы еи достаточ ны еусл овия равновесия тел а ил исистемы тел п оддействием п рил ож енны хсил .
В основестатикил еж атсл едую щ иеаксиомы : 1. Е сл и на свободное АТТ действую т две
сил ы , тотел омож етнаходиться в равновесиитогда
и тол ькотогда, когда эти сил ы равны п о модул ю |
и |
|||
нап равл ены |
вдол ь |
одной |
п рямой |
в |
противоп ол ож ны естороны (рис.3.1.).
2.Д ействиеданной системы сил на АТТ не изменяется , есл и кней п рибавитьил иотнееотня ть уравновешенную систему сил .
С л едствие: действие сил ы на АТТ |
не изменится , есл и п еренести точ ку |
|||
п рил ож ения сил ы вдол ьеел иниидействия вл ю бую другую точ ку тел а. |
||||
|
|
– скол ьзящ ий вектор(см. § 2). |
|
|
F |
|
|||
3. |
Закон п арал л ел ограмма сил . Д весил ы , п рил ож енны ектел у в одной |
|||
точ ке, |
имею т равнодействую щ ую , |
равную геометрич еской (векторной) |
||
суммеэтихсил ип рил ож енную втой ж еточ ке(рис. 3.2.).
9
4. |
Законравенства действия ип ротиводействия . |
|
|
|
|
|
|
||||||||||
Д ва тел а действую тдруг на друга с сил ами равны ми |
|
|
|
|
|
||||||||||||
п о вел ич ине, п ротивоп ол ож ны ми |
п о нап равл ению , |
|
|
|
|
|
|
||||||||||
л еж ащ ими на |
одной |
п рямой |
и |
п рил ож енны ми к |
|
|
|
|
|
||||||||
разны м |
тел ам |
(п ринц ип действия -п ротиводействия ) |
|
|
|
|
|
|
|||||||||
(рис. 3.3.). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. |
П ринц ип |
отвердевания . |
Равновесие |
|
|
|
|
|
|||||||||
изменя емого (деф ормируемого) |
тел а, |
находящ егося |
|
|
|
|
|
|
|||||||||
п од действием |
данной |
системы |
сил , |
ненарушится , |
|
|
|
|
|
|
|||||||
есл ител осч итатьабсол ю тнотверды м. |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
§ 4. П рим е ры |
д е йс твия с ил вс татик е . |
|
|
|
|
|
|||||||||
|
1. С осредоточ енная сил а |
– |
сил а, |
действую щ ая |
в |
одной точ ке, |
|||||||||||
явл яется |
абстракц ией |
сил ы , |
действую щ ей на |
небол ьшой |
уч асток. |
||||||||||||
Размерностьсосредоточ енной сил ы [ |
|
]=Н (рис.3.2.). |
|
|
|
|
|
|
|||||||||
F |
|
|
|
|
|
|
|||||||||||
|
2. Расп редел енны е сил ы |
– |
сил ы , |
действую щ ие на |
некотором |
||||||||||||
отрезкедл ины , уч асткеп оверхности, |
ч асти объема. |
О ни характеризую тся |
|||||||||||||||
интенсивностью |
q, размерность которой |
[q]= |
H |
, |
[q]= |
H |
, [q]= |
H |
на |
||||||||
|
м 2 |
м 3 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|||
отрезке, уч асткеп оверхности, ч астиобъема, соответственно. Расп редел енны е сил ы , действую щ иена отрезкедл ины , п риводя тся к равнодействую щ ей, л иния действия которой п роходитч ерезточ ку С , гдеточ ка С – ц ентртя ж ести п л ощ адиф игуры (рис 4.1 – 4.3.).
10
3. |
М оментсил ы относител ьноц ентра. |
|
|
|
|
||
Е сл и |
п од действием п рил ож енной |
сил ы тел о мож ет совершать |
|||||
вращ ение вокруг некоторой точ ки, то |
вращ ател ьны й |
эф ф ект сил ы |
|||||
|
|
|
|
|
]= H × )мm.F( |
||
характеризуется моментом сил ы . Размерностьмомента сил ы [ |
0 |
|
|||||
Точ ку, относител ьно которой берется момент, назы ваю т ц ентром момента, а моментсил ы относител ьноэтой точ ки – моментом относител ьно ц ентра.
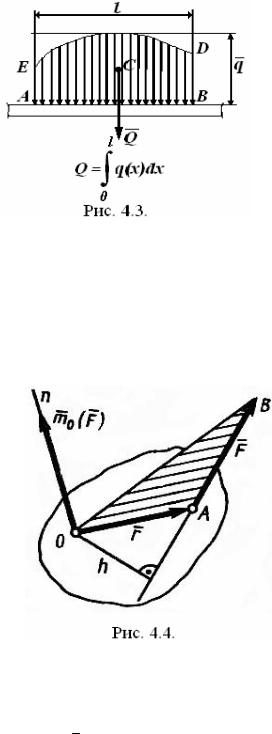
Рассмотрим сил у |
F |
, п рил ож енную к тел у в точ кеА |
(рис. |
4.4.). |
И з |
|||||||||||||||||||||||||||||||
некоторого ц ентра О |
оп устим п ерп ендикул я р на л инию |
действия |
сил ы |
|
|
; |
||||||||||||||||||||||||||||||
F |
||||||||||||||||||||||||||||||||||||
дл ину |
h этого п ерп ендикул я ра |
|
|
назы ваю т п л еч ом |
сил ы |
|
относител ьно |
|||||||||||||||||||||||||||||
F |
||||||||||||||||||||||||||||||||||||
ц ентра |
О . М ом ент |
силы от носит ельно |
цент ра |
О |
равен |
векторному |
||||||||||||||||||||||||||||||
п роизведению радиус-вектора |
r |
= |
|
|
|
|
|
, п роведенного из ц ентра О |
в точ ку А, |
|||||||||||||||||||||||||||
О А |
||||||||||||||||||||||||||||||||||||
гдеп рил ож ена сил а, на саму сил у |
0 ( |
|
|
)= [ |
|
|
|
|
|
|
]r,m F |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F, |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
|
|
ö |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
0 ( ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
= |
|
|
|
|
|
× |
|
|
ç |
|
|
|
|
|
|
÷ |
F |
F, r |
sin r |
Fm F |
|||||||||||||
|
|
|
|
|
|
|
|
|
ç |
|
|
|
|
|
|
÷ = × h . |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|