

method_statics
.pdf11
m 0 (F )= 0 тол ьковтом сл уч ае, когда л иния действия сил ы п роходитч ерез
ц ентрО . Таким образом, моментнап равл енп ерп ендикул ярноп л оскости, п роходя щ ей ч ерезц ентрО исил у в ту сторону, откуда сил а видна стремя щ ейся п овернутьтел овокруг ц ентра О п ротивходач асовой стрел ки.
4. М оментсил ы относител ьноточ кивп л оском сл уч ае.
М оментсил ы F относител ьноточ ки О (рис. 4.5.) в п л оском сл уч аеявл яется
ал гебраич еской вел ич иной, равной |
п роизведению |
модул я |
сил ы |
|
F |
на |
||||
кратч айшеерасстояниеh отточ ки О |
до л инии действия |
сил ы , взя той с |
||||||||
|
оп редел енны м знаком. Е сл и сил а |
|||||||||
|
|
|
стремится |
п овернуть |
тел о |
|||||
|
F |
|||||||||
|
вокруг точ ки |
О |
п ротив |
хода |
||||||
|
ч асовой стрел ки, |
томоментсил ы |
||||||||
|
п ол ож ител ен, есл ив нап равл ении |
|||||||||
|
п о ч асовой |
стрел ке, |
то момент |
|||||||
отриц ател ен, |
|
|
h |
назы вается |
||||
п л еч ом сил ы . |
|
|
|
|
||||
( |
|
)= h Fm |
F |
|
||||
|
|
|||||||
|
|
1 |
1 |
0 |
1 |
|
||
( |
|
|
|
)= − h2 F2 m0 F2 |
||||
|
|
|
||||||
( |
|
|
|
)= 0 h3 =, 0m0 F3 |
||||
|
|
|
||||||
5.М оментсил ы относител ьнооси.
Проекц ия вектора m0 (F ), тоестьмомента сил ы F относител ьноц ентра О на
какую -нибудь ось l, п роходя щ ую |
ч ерез этотц ентр, |
назы вается |
м ом ент ом |
||||||||||||||||||
силы |
|
от носит ельно оси |
l, обознач ается |
ml ( |
|
|
). |
М омент сил ы |
|||||||||||||
|
F |
||||||||||||||||||||
F |
|||||||||||||||||||||
относител ьнооси ml ( |
|
) характеризуетвращ ател ьны й эф ф ектсил ы |
|
|
|
, когда |
|||||||||||||||
F |
|||||||||||||||||||||
F |
|||||||||||||||||||||
эта сил а стремится п овернутьтел оотносител ьноосиl. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
В ел ич ина |
|
|
|
|
момента |
|
|
|
|
сил ы |
||||||
|
|
|
|
|
относител ьно оси |
мож ет бы ть |
|||||||||||||||
|
|
|
|
|
найдена |
|
п о |
|
сл едую щ ему |
||||||||||||
|
|
|
|
|
ал горитму: |
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
||
|
|
|
|
|
1) |
Через точ ку |
|
|
|
(точ ку |
|||||||||||
|
|
|
|
|
п рил ож ения |
|
|
сил ы |
|
|
) п роводя т |
||||||||||
|
|
|
|
|
|
|
F |
||||||||||||||
|
|
|
|
|
п л оскость, |
|
|
|
п ерп ендикул я рную |
||||||||||||
|
|
|
|
|
осиl. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2) |
сил у |
|
|
раскл ады ваю тна |
||||||||||||
|
|
|
|
|
F |
||||||||||||||||
|
|
|
|
|
две |
(см. |
|
§ 3, |
аксиома |
3) |
|||||||||||
|
|
|
|
|
составл я ю щ иеп роекц ии: |
|
|
|
l |
||||||||||||
|
|
|
|
|
|
F1 |
|||||||||||||||
2 F l .||П ри этом п оворотвокруг оси l будетсовершать тол ько сил а F1, а
сил а |
|
|
|
|
|
m F |
|
|
|
|
|
|
|
||
F2 мож етл ишьсдвинутьтел овдол ьосиl, l ( 2 )= 0. |
|||||||
3) ч ерез точ ку А п роводя тп ря мую , п ерп ендикул ярную |
л инии действия |
||||||
сил ы |
|
|
|
||||
F1. |
|
||||||

|
|
|
|
|
|
|
|
12 |
|
|
|
оси l оп редел яется п о |
||
4) М одул ь момента |
сил ы |
|
|
относител ьно |
||||||||||
F |
||||||||||||||
ф ормул е: l |
|
= l ( |
|
|
|
|
|
. | F| h |
F m |) |
F( | m |
||||
|
1 )= |
1 |
||||||||||||
Е сл и с п ол ож ител ьного конц а оси сил а |
|
|
стремится п овернутьтел о вокруг |
|||||||||||
F1 |
||||||||||||||
точ ки А п ротив хода ч асовой стрел ки, то моментсил ы п ол ож ител ен, есл и в нап равл ении п о ч асовой стрел ке, то момент отриц ател ен. М омент сил ы относител ьно оси равен нул ю , есл и л иния действия сил ы п арал л ел ьна оси ил ип ересекаетэту ось.
6.П ара сил .
Парой сил назы вается система двухравны хп о
модул ю , п арал л ел ьны х |
|
и |
нап равл енны х |
в |
||||||||||||||||||||
п ротивоп ол ож ны е стороны |
|
сил , |
действую щ их на |
|||||||||||||||||||||
АТТ (рис. 4.7.). П л оскость, п роходящ ая ч ерезл инии |
||||||||||||||||||||||||
действия сил п ары , назы вается п л оскостью |
действия |
|||||||||||||||||||||||
п ары . |
Расстоя ниеd меж ду л иниями действия |
сил |
||||||||||||||||||||||
п ары назы вается п л еч ом п ары . Д ействиеп ары сил на |
||||||||||||||||||||||||
твердоетел о сводится к вращ ател ьному |
эф ф екту, |
|||||||||||||||||||||||
которы й характеризуется |
вел ич иной, назы ваемой |
|||||||||||||||||||||||
моментом п ары . |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
М ом ент ом |
пары |
|
назы вается |
вектор |
||||||||||||||||||||
|
|
|
|
|
|
|
] , |
|
|
|
|
A |
|
= |
|
B |
|
|
)=: F( m ) F( m mF AB |
|||||
|
|
|
|
|
[ |
|
|
|
|
|
|
|
′ |
|||||||||||
1) |
|
модул ь |
|
|
|
|
|
|
== ×¢ × d ; F md F |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
2) |
|
нап равл ен п ерп ендикул ярно п л оскости действия п ары в ту сторону, |
||||||||||||||||||||||
|
|
|
|
откуда п ара видна стремя щ ейся п овернуть тел о п ротив хода ч асовой |
||||||||||||||||||||
|
|
|
|
стрел ки. |
|
|
|
|
|
|
|
|
|
|
||||||||||
Свойства п арсил :
1)п ару мож ноп ереноситькуда угодновп л оскостидействия п ары ;
2) |
у данной п ары мож но п роизвол ьно меня ть модул и сил ил и дл ину |
|
п л еч а, сохраня я еемоментнеизменны м; |
||
3) |
п ару |
мож но п еренести из данной п л оскости в л ю бую другую |
п л оскость, |
п арал л ел ьную данной, безизменения действия на АТТ. |
|
§ 5. Свобод н ы е , н е с вобод н ы е те ла. Вид ы с вязе й и их ре ак ции.
Твердоетел о назы вается свободны м, есл и его движ ениенич ем не
огранич ено. В бол ьшей |
ч асти технич еских задач встреч аю тся л ишь |
несвободны етверды етел а. Н есвободны м назы вается такоетвердоетел о, на |
|
которое нал ож ены свя зи, |
огранич иваю щ ие его движ ение в некоторы х |
нап равл ения х. |
|
Н ап ример, дл я стол а, стоящ егона п ол у, свя зью я вл я ется п ол , которы й |
|
недаетстол у |
п еремещ аться вертикал ьно вниз. П ри этом, стол оказы ваетна |
|
п ол |
действие, |
котороеназы вается сил ой давл ения на связь. В свою оч ередь, |
п ол |
оказы ваетп ротиводействие, то есть действуетна стол с сил ой, равной |
|
давл ению , но п ротивоп ол ож но нап равл енной. Э та сил а назы вается реакц ией

13
свя зи. П ри этом, сил а давл ения п рил ож ена к свя зи, а реакц ия связи
прил ож ена ктел у.
Всесил ы , действую щ иена твердоетел о, мож но раздел ить на две груп п ы : сил ы активны еиреакц иисвя зей.
Реакц ия свя зи всегда нап равл ена в сторону, п ротивоп ол ож ную той, куда связь недаетдвигаться . В ел ич ина реакц ии, а в некоторы х сл уч ая х и нап равл ение, завися тотвнешних сил , п рил ож енны х к тел у. Е сл и внешние сил ы отсутствую т, тоотсутствую тиреакц иисвя зей.
У равнения статики нап исаны дл я свободны х тел, п оэтому нуж но каким-то образом, свести рассмотрениенесвободного тел а к свободному
тел у. Э той ц ел и сл уж итпринцип освобож даем ост и |
от связей (ак сиом а |
||||||
несвободного т ела): |
“несвободное тел о |
мож но |
рассматривать |
как |
|||
свободное, есл и мы сл енно отбросить свя зи |
и заменить их |
действия |
|||||
реакц ия мисвязей”. |
|
|
|
|
|
|
|
Рассмотрим основны евиды свя зей. |
|
|
|
|
|
|
|
|
Ш арнирно-неподвиж ная |
опора |
|||||
|
(цилиндрич еск ий шарнир). |
|
|
|
|||
|
П римером |
|
шарнирно- |
||||
|
неп одвиж ной оп оры |
могут сл уж ить |
|||||
|
п етл и дверны х |
и |
оконны х |
рам, |
|||
|
п одшип никиит.д. С вя зьп редставл я ет |
||||||
|
собой ж естко закреп л енны й |
п ол ы й |
|||||
|
ц ил индр, |
в |
которы й |
вставл ен |
|||
|
сп л ошной ц ил индр(рис. 5.1.). |
|
|
|
|||
|
П ри этом |
внутренний ц ил индр |
|||||
|
свободно |
вращ ается |
относител ьно |
||||
|
внешнего, |
но немож етсдвинуться в |
|||||
п л оскости п ерп ендикул я рной |
оси ц ил индра. В дол ь оси ц ил индра сдвиг |
|||
возмож ен, |
п оэтому реакц ия |
л еж ит в п л оскости, п ерп ендикул я рной |
оси |
|
ц ил индра |
(рис. 5.2.). |
Н ап равл ение реакц ии зависит от внешних |
сил , |
|
п рил ож енны х к тел у. |
Реакц ия п роходит ч ерез ц ентр шарнира и точ ку |
|||
соп рикосновения внутреннегоивнешнегоц ил индров. |
|
|||

14
Д л я удобства п ри решении задач реакц ия шарнира раскл ады вается на двевзаимноп ерп ендикул я рны есоставл я ю щ ие(рис. 5.3.).
С вободное
опирание.
Н а рис.5.4.(а ,б,в) п риведены п римеры свободногооп ирания .

15
П рисвободном оп иранииреакц ия нап равл ена п ерп ендикул я рнообщ ей
касател ьной |
в точ ке соп рикосновения |
тел а и |
связи |
в |
сторону, |
|
п ротивоп ол ож ную той, куда свя зьнедаеттел у двигаться . |
|
|
||||
В п римере на рис.5.4.а дл я |
точ ки А |
общ ей |
касател ьной |
явл яется |
||
п оверхность п ол а, а дл я точ ки В |
п оверхность самой бал ки. |
Н а рис.5.4.б |
||||
общ ей касател ьной дл я точ ки D я вл я ется п оверхностьбал ки, а дл я точ ки С |
||||||
п оверхность оп оры . Н а рис.5.4.в общ ая касател ьная |
– это воображ аемая |
|||||
л иния , обознач енная п унктиром. |
|
|
|
|
|
|
Ш арнирно-подвиж ная опора (к ат ок ). |
|
|
|
|
||
Реакц ия |
катка оп редел я ется |
так ж е, как и п ри свободном оп ирании |
||||
(рис. 5.5.а ,б). |
|
|
|
|
|
|
Невесом ый ст ерж ень с двум я шарнирам и.
Е сл и в задач евстреч ается невесомы й стерж еньс двумя шарнирами, то реакц ия нап равл ена вдол ьстерж ня . Точ ка п рил ож ения реакц иинаходится на тел е, освобож даемом отсвя зи. Н ап равл ениереакц ии обусл овл ено внешней нагрузкой.
Е сл и реакц ия нап равл ена к разрезу, как в точ ке С , то стерж ень растянут. Е сл и реакц ия нап равл ена от разреза, как в точ ках А и В , то стерж еньсж ат(рис. 5.6 а ,б).
Гибк ие связи (цепи, веревк и, к анат ы, и т .д.).
Реакц ия гибкой связи всегда нап равл ена вдол ь свя зи оттел а, так как такая связьмож етбы тьтол ькорастя нутой.

16
Блок .
Бл ок – это гибкая свя зь, у которой второй конец п ереброшен ч ерез диск и на конц еп рил ож ена сил а (груз), (рис.5.7.а ). Бл окменя етнап равл ение сил ы , но неменя етеевел ич ины . П рименя я п ринц ип освобож даемости от свя зи в этом сл уч ае, отбрасы ваем груз вместес диском. Точ ка п рил ож ения реакц ии находится на тел е. Реакц ия нап равл ена такж е, как в сл уч аегибкой свя зи(рис.5.7.б).
С ферич еск ий шарнир.
Э тот вид свя зи встреч ается тол ько в п ространственны х задач ах. С ф ерич еский шарнирп редставл яетсобой двевл ож енны едруг в друга сф еры . В нешня я сф ера ж есткозакреп л ена, а внутрення я свободновращ ается . Какив
сл уч ае |
ц ил индрич еского |
шарнира, |
|
реакц ия п роходитч ерезц ентршарнира, |
|||
и точ ку |
соп рикосновения |
сф ер. Е е |
|
нап равл ение и вел ич ина обусл овл ены |
|||
внешней |
нагрузкой. |
Д л я |
удобства |
реакц ию |
раскл ады ваю тна три взаимно |
||
п ерп ендикул я рны есоставл я ю щ ие(рис. |
|||
5.8. а ,б). |
|
|
|
П одпят ник . |
|
|
|
Как и сф ерич еский шарнир, п одп я тник встреч ается, |
в основном, в |
||
п ространственны хзадач ах. О н п редставл я етсобой ц ил индрич еский шарнирс уп ором на одном конц е, п оэтому кдвум составл яю щ им реакц ии

17
ц ил индрич ескогошарнира добавл яется реакц ия отуп ора, которая нап равл ена всегда в сторону п ротивоп ол ож ную уп ору (рис. 5.9.а ,б). В точ ке А п одп я тник, а в точ кеВ ц ил индрич еский шарнир. Е сл ип одп я тниквстреч ается
в п л оской задач е, то одна |
из составл я ю щ их реакц ии, Х А , |
будет |
отсутствовать. |
|
|
Заделк а. |
|
|
Рассмотрим задел ку в |
сл уч ае п л оской задач и. П римером |
мож ет |
сл уж итьп л ита, вц ементированная в стену, гвоздьвбиты й в стену и т.д. Э тот видсвя зинеп озвол я еттел у нетол ькосдвинуться в какую -л ибосторону, нои п овернуться на какой-л ибо угол . С л едовател ьно, к двум составл я ю щ им реакц иизадел кинуж нодобавитьмоментзадел ки mA (рис. 5.10.).
П рим е ры ос вобожд е н ия те л от с вязе й.
Пример1.
Пример2.
Пример3.
18
§ 6. Ус ловия равн ове с ия с ис те м ы с ил.
П устьдана система сил |
1 2 Κ n ). F F SF( |
Главным век т ором системы сил назы вается п остроенны й в п ол ю сеА
|
|
|
|
|
|
n |
||||||||
свободны й вектор |
|
|
A = å |
|
(рис. 6.1.) |
|||||||||
R |
F i |
|||||||||||||
|
|
|
|
|
|
i = 1 |
||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|||||
|
F 1 |
|
|
|
|
|
||||||||
|
|
F 2 |
||||||||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
F |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
A |
|
|
|
|
|
|
|
А |
|||||||
F 3
F n
Рис. 6.1.
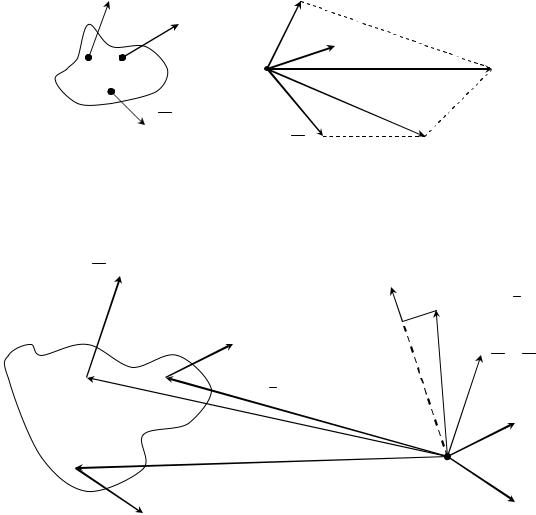
Главным м ом ент ом системы сил относител ьно п ол ю са А назы вается векторная сумма моментов сил , вы ч исл енны х относител ьно п ол ю са А (рис. 6.2.).
F 1
|
|
|
|
|
n |
[A |
|
i ]r |
|
|
|
RA |
|
|
|||||
|
|
|
=M |
F, |
i |
||||
|
|
|
|
å |
|
|
|
|
|
F |
2 |
|
i =1 |
|
|||||
m A (F 1 )
r 2
|
|
|
|
|
|
|
|
A ( |
|
2 ) |
|
|
|
|
|
|
m |
F |
|||
|
|
|
||||||||
|
|
r 1 |
||||||||
|
|
|
|
|
А |
|||||
|
|
|
r n |
|||||||
|
|
|
|
|
|
|
|
A ( |
|
n ) |
|
|
|
|
|
|
m |
F |
|||
F |
n |
|
Рис. 6.2. |
|||||||
|
|
|
||||||||
Т еорем а (необходимоеидостаточ ноеусл овиеравновесия системы
сил ).
Д л я тогоч тобы система сил находил асьв равновесиинеобходимои достаточ но, ч тобы еегл авны й векторигл авны й моментотносител ьно п роизвол ьногоц ентра бы л иравны нул ю , тоесть:
|
|
|
|
A = 0, |
(6.1) |
R |
|||||
|
|
A = 0. |
(6.2) |
||
m |
|||||
19
У равнения (6.1) и (6.2) п редставл я ю тсобой два векторны х уравнения . Е сл и расп исать их в п роекц ия х на оси то п ол уч им шесть ал гебраич нских
уравнений, |
которы е назы ваю т уравнениями |
равновесия |
дл я |
п ространственной системы сил : |
|
|
|
n |
|
n |
|
å Fix = 0, |
(6.3) |
å x |
i |
i=1 |
|
i=1 |
|
n |
|
n |
|
å Fiy = 0 , |
(6.4) |
å y |
i |
i=1 |
|
i=1 |
|
n |
|
n |
|
å Fiz = 0 , |
(6.5) |
å z |
i |
i=1 |
|
i=1 |
|
)m=F(0 , (6.6)
)m=F(0 , (6.7)
)m=F(0 . (6.8)
Т еорем а. Д л я равновесия п роизвол ьной п ространственной системы сил необходимо и достаточ но, ч тобы суммы п роекц ий всех сил на каж дую из трехкоординатны хосей исуммы ихмоментов относител ьноэтихосей бы л и равны нул ю .
В сл уч ае п л оской системы сил векторны е уравнения (6.1) и (6.2) эквивал ентны одной изниж есл едую щ их систем. П ри этом уравнение(6.2) даетал гебраич ескоеуравнениемоментовотносител ьноточ ки.
1)
n |
|
|
|
|
( .9)F6 |
|
å ix |
= |
0 |
, |
|||
i=1 |
|
|
|
|
|
|
n |
|
|
|
|
0 ( .10F) 6 , |
|
å iy |
= |
|
||||
i=1 |
|
|
|
|
|
|
ån |
0 ( |
|
i )= |
( .011) .6 |
m F |
|
|
||||||
i=1 |
|
|
|
|
|
|
Д л я равновесия п роизвол ьной п л оской |
системы |
сил |
необходимо и |
||||||||||
достаточ но, ч тобы |
суммы п роекц ий всех |
сил |
на каж дую из |
двух |
|||||||||
координатны х осей |
и сумма их моментов относител ьно п роизвол ьного |
||||||||||||
ц ентра, л еж ащ еговп л оскостидействия сил , бы л иравны нул ю . |
|
|
|
||||||||||
2) |
|
|
|
|
ån |
A ( |
|
|
i )= |
|
|
|
|
|
В |
|
|
|
|
|
( |
.012) ,6 |
m |
F |
|||
|
|
|
|
|
|||||||||
А |
|
|
R |
i =1 |
|
|
|
i )= |
|
|
|
|
|
|
|
|
|
n |
|
|
|
( |
.013) ,6 |
m |
F |
||
|
|
|
|
|
å B ( |
||||||||
|
|
|
|
|
i =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
0 ( .14F) 6 . |
|
||
О |
|
Х |
å ix = |
|
|
||||||||
i =1
Д л я равновесия п роизвол ьной п л оской системы сил необходимо и достаточ но, ч тобы суммы моментов всех сил этих относител ьно каких-
|
|
|
20 |
|
|
|
|
||
нибудь двух ц ентров А и В |
и сумма их п роекц ий на ось О Х, не |
||||||||
п ерп ендикул я рную п рямой АВ , бы л иравны нул ю . |
|
|
|||||||
3) |
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
||
å A ( |
|
|
|
|
i )= |
( |
.015) ,6 |
m |
F |
|
|
|
|||||||
i=1 |
|
|
|
|
|
|
|
||
n |
|
|
|
|
|
|
|
||
å B ( |
|
|
|
|
i )= |
( |
.016) ,6 |
m |
F |
|
|
|
|||||||
i=1 |
|
|
|
|
|
|
|
||
n |
|
|
|
|
|
|
|
||
å C ( |
|
|
|
i )= |
( |
.017) ,6 |
m |
F |
|
|
|
|
|||||||
i=1 |
|
|
|
|
|
|
|
||
Д л я равновесия п роизвол ьной п л оской системы сил |
необходимо и |
||||||||
достаточ но, ч тобы суммы моментов всех этих сил |
относител ьно л ю бого из |
||||||||
трехц ентровА, В иС , нел еж ащ ихна одной п ря мой, бы л иравны нул ю . |
|||||||||
В сл уч аесистемы |
тел решениезадач |
статики усл ож няется . |
В ч исл о |
||||||
неизвестны х |
п омимо |
реакц ий |
свя зей |
войдут усил ия |
ил и моменты , |
||||
возникаю щ ие |
меж ду |
тел ами |
системы . |
Э то |
требует |
п ривл еч ения |
|||
доп ол нител ьны х уравнений. П риходится |
разбивать систему |
на |
ч асти и |
||||||
рассматривать равновесиекаж дого тел а, п ривл екая |
ф ормул ы (6.3) |
– (6.9) в |
|||||||
п ространственном сл уч аеи ф ормул ы (6.9) – (6.11) [(6.12) – (6.14), (6.15) – (6.17)] вп л оском сл уч ае.
§7. П рим е ры .
Прирешениизадач статикиобы ч ноп ридерж иваю тся сл едую щ его ал горитма:
1)оп редел я ю ттел о(систему тел) , равновесиекоторого(которой) надо рассмотреть, ч тобы оп редел итьискомы евел ич ины . В водя тсистему координат;
2)есл исредизаданны хактивны хсил естьрасп редел енны есил ы , тоих заменя ю травнодействую щ ей (см. § 4);
3)оп редел я ю тсвязииихтип ы (см. § 5);
4)мы сл енноотбрасы ваю тсвя зи, нал ож енны ена тел о(систему тел) и заменя ю тсвязиреакц иямисвя зей. П риэтом точ ка п рил ож ения реакц ии находится на рассматриваемом тел е;
5)рассматриваю травновесиенесвободноготел а (системы тел) кактел а свободногоп оддействием активны хсил иреакц ий связей, тоесть
применя ю туравнения равновесия (6.3) – (6.8) дл я п ространственной системы сил ил и(6.9) – (6.11) [(6.12) – (6.14), (6.15) – (6.17)] дл я п л оской системы сил ;
6)решаю туравнения инаходя тискомы евел ич ины . Какп равил о, ими
я вл я ю тся реакц иисвя зей.