

Линейная одномерная регрессионная модель
Пусть в результате эксперимента получена таблица некоторой зависимости
Таблица 2.1
|
|
|
|
… |
|
|
|
|
|
… |
|
Результаты наблюдений отобразим на графике (см. рис. 2.2). Всего на графике n экспериментальных точек, которые соответствуют n наблюдениям.
а) Исследователь вносит гипотезу о структуре ящика
Предположим,
что полученные
данные
(табл.2.1) подчиняются
линейной гипотезе, то есть выход y зависит
от входа x линейно,
то есть гипотеза имеет вид:
![]() .
.
Данная модель называется линейной одномерной регрессионной моделью т.е модель, имеющая один вход и один выход.
Рис. 2.1. Одномерная модель черного ящика
б) Определение неизвестных коэффициентов a0 и a1 модели
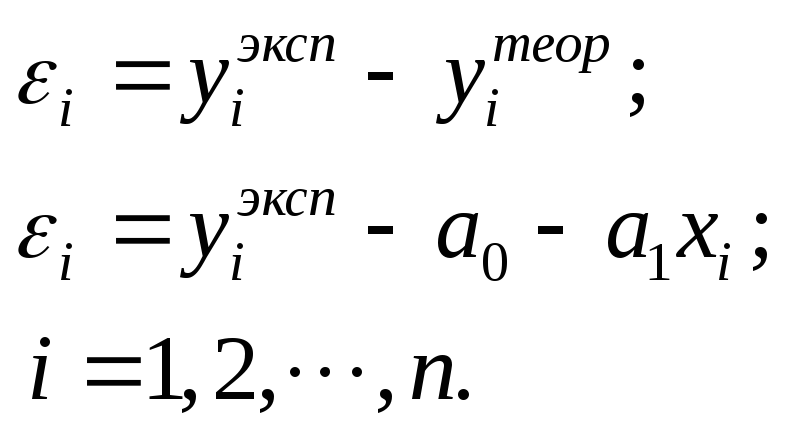
Для
каждой из n
снятых экспериментально точек вычислим
ошибку
![]() (невязку)
между экспериментальным значением (
(невязку)
между экспериментальным значением (![]() )
и теоретическим значением (
)
и теоретическим значением (![]() ),
лежащим на гипотетической прямой
),
лежащим на гипотетической прямой
![]() (см. рис.2.2):
(см. рис.2.2):

Рис. 2.2. Графический вид представления результатовнаблюдения над черным ящиком
Чтобы положительные ошибки не компенсировали в сумме отрицательные, каждую из ошибок возводят в квадрат и складывают их значения в суммарную ошибку s уже одного знака:
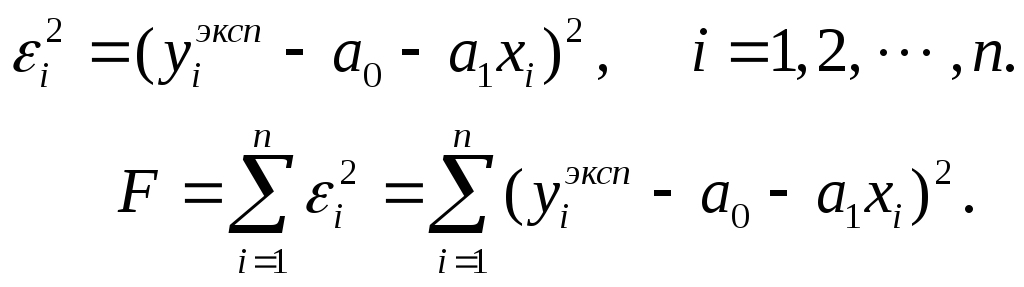
Цель
метода — минимизация суммарной ошибки
F
за счет подбора коэффициентов
![]() .
Другими словами, это означает, что
необходимо найти такие коэффициенты
.
Другими словами, это означает, что
необходимо найти такие коэффициенты![]() линейной функции
линейной функции![]() ,
чтобы ее график проходил как можно ближе
одновременно ко всем экспериментальным
точкам. Данный
метод называется методом
наименьших квадратов.
,
чтобы ее график проходил как можно ближе
одновременно ко всем экспериментальным
точкам. Данный
метод называется методом
наименьших квадратов.
![]() (2.5)
(2.5)
Суммарная
ошибка F
является функцией двух переменных
![]() и
и
![]() ,
то есть
,
то есть![]() ,
меняя которые, можно влиять на величину
суммарной ошибки (см. рис. 2.3).
,
меняя которые, можно влиять на величину
суммарной ошибки (см. рис. 2.3).

Рис. 2.3. Примерный вид функции ошибки
Чтобы суммарную ошибку минимизировать, найдем частные производные от функции F по каждой переменной и приравняем их к нулю (условие экстремума):
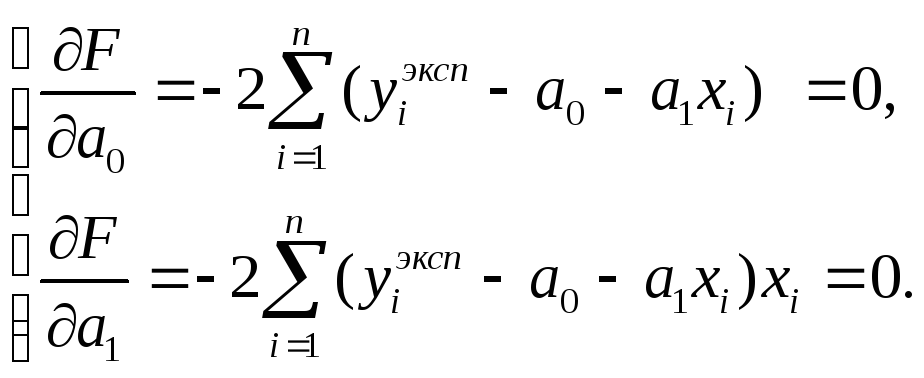 (2.6)
(2.6)
Уравнения (2.6) можно переписать в виде так называемых нормальных уравнений:
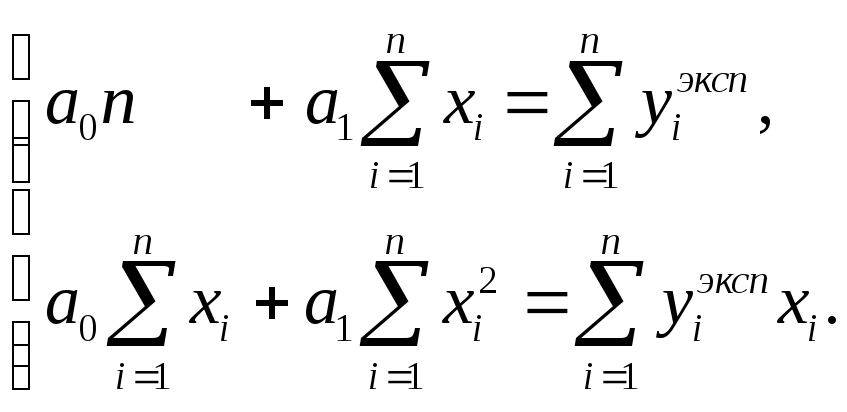 (2.7)
(2.7)
Решив
эту систему относительно переменных
![]() и
и
![]() ,
получим конкретный вид искомой функции
,
получим конкретный вид искомой функции
![]() .
.
Для
проверки точности оценок
![]() и адекватности модели используются
критерии Стьюдента и Фишера.
и адекватности модели используются
критерии Стьюдента и Фишера.
в) Проверка
Естественно
ожидать, что значения найденной функции
![]() в точках
в точках![]() будут отличаться от табличных значений.Чтобы
определить, принимается гипотеза или
нет, нужно, во-первых, рассчитать ошибку
между точками заданной экспериментальной
и полученной теоретической зависимости
и суммарную ошибку:
будут отличаться от табличных значений.Чтобы
определить, принимается гипотеза или
нет, нужно, во-первых, рассчитать ошибку
между точками заданной экспериментальной
и полученной теоретической зависимости
и суммарную ошибку:
![]()
![]()
И,
во-вторых, необходимо
найти значение σ по
формуле
![]() ,
где F -
суммарная ошибка, n -
общее число экспериментальных точек.
,
где F -
суммарная ошибка, n -
общее число экспериментальных точек.
Если
в полосу, ограниченную линиями ![]() и
и ![]() (рис. 2.4),
попадает 68.26% и более экспериментальных
точек
(рис. 2.4),
попадает 68.26% и более экспериментальных
точек ![]() ,
то выдвинутая нами гипотеза принимается.
В противном случае выбирают более
сложную гипотезу или проверяют исходные
данные. Если требуется большая уверенность
в результате, то используют дополнительное
условие: в полосу, ограниченную линиями
,
то выдвинутая нами гипотеза принимается.
В противном случае выбирают более
сложную гипотезу или проверяют исходные
данные. Если требуется большая уверенность
в результате, то используют дополнительное
условие: в полосу, ограниченную линиями![]() и
и ![]() ,
должны попасть 95.44% и более экспериментальных
точек
,
должны попасть 95.44% и более экспериментальных
точек ![]() .
.
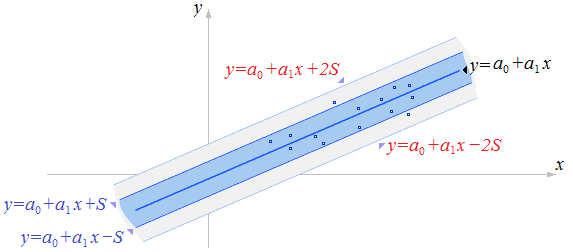
Рис. 2.4. Исследование допустимости принятия гипотезы
Расстояние S связано с σ следующим соотношением:
S = σ/sin(β) = σ/sin(90° – arctg(a1)) = σ/cos(arctg(a1)),
что проиллюстрировано на рис. 2.5.
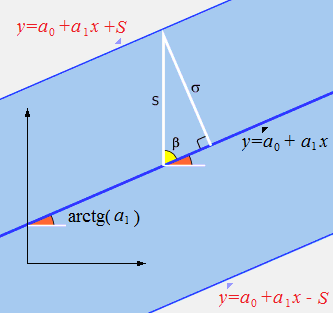
Рис. 2.5. Связь значений σ и S
Условие принятия гипотезы выведено из нормального закона распределения случайных ошибок (см. рис. 2.6). P — вероятность распределения нормальной ошибки.
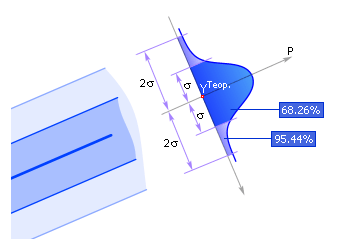
Рис. 2.6. Пределы отклонения экспериментальных
точек