

u_lectures
.pdfn |
|
∂y |
2 |
2 |
2 |
||
Ty = ∑i =1 |
|
|
|
|
Txi |
kxi |
|
∂x |
|
||||||
|
|
|
|
||||
|
|
i |
xi |
|
|||
Где kxi – коэффициент, учитывающий |
|
|
закон распределения отклонений |
||||
аргументов через коэффициент λxi (см. п. 1.3 и табл. 1.5) и избранный процент
риска, обусловливающий выход значений функции у за пределы установленного допуска; kxi = λxi t ; здесь t – коэффициент риска.
При распределении отклонений аргументов по нормальному закону
( λxi = 1/3) и риске в 0,27 % (t = 3) коэффициент kxi = 1.
Формулы, связывающие как средние значения, так и поля допусков функции и аргументов, являются универсальными и могут быть применены для расчета допусков в связях различных физических величин при решении прямых и обратных задач.
При решении прямой задачи исходными величинами являются среднее
значение y и значение поля допуска Ту, которыми определены границы
отклонений функции. Значения этих величин заданы условиями конструкторской или технологической задачи. Расчет допусков сводится к
установлению средних значений аргументов xi , соответствующих y , и
распределению значения Ту между аргументами с учетом передаточных отношений и квадратического суммирования Txi .
При решении обратной задачи известными величинами являются средние значения xi , поля допусков или поля рассеяния ωxi фактических
отклонений аргументов. В состав исходных данных могут входить и значения коэффициентов kxi . Решение обратной задачи сводится к определению по этим
данным соответствующих значений характеристик y , Ту или ωy точности
функции. Решение обратной задачи всегда одновариантно и в отношении этих величин.
2.3. Свойства связей
Связь в машине или в производственном процессе можно рассматривать как замкнутый контур. Одной частью этого контура является выражение или результат решения данной задачи. Другая часть контура, состоящая не менее чем из двух аргументов, обеспечивает ее решение. Замкнутость связей является одним из важных их свойств.
Контуры связей могут сопрягаться друг с другом, имея общие звенья. При этом можно наблюдать различные случаи таких сопряжений.
1.Две (может и более) связи имеют общие аргументы (рис. 2.4, а). Тогда
у= f(x1, х2, х3, х4, х5); W = ϕ(V1, V2 , V3 , V4 ) . При этом V3 = x3; V2 = x4.

Рис. 2.4. Три случая сопряжения контуров связей
В теории размерных цепей такой вид сопряжения связей получил название параллельной связи размерных цепей.
2.Один из аргументов одной связи является функцией другой связи. В свою очередь аргумент другой связи может быть функцией третьей связи и т.д. На рис. 2.4, б представлена схема такого случая:
3.Каждый из аргументов данной связи является функцией какой-то своей связи.
По своей сути проектирование машины – это последовательный переход от связей, с помощью которых машина выполняет свое служебное назначение,
ксвязям свойств материалов и размерным связям, составляющим ее конструкцию. Этот переход сопровождается многократными преобразованиями связей
Производственный процесс изготовления машины представляет собой проявление различного вида связей. Связи производственного процесса можно распределить по уровням. Так, к связям высшего уровня можно отнести связи свойств материалов, размерные, информационные, временные и экономические, т.е. те связи, за счет непосредственного действия которых создаются детали машины, осуществляется ее сборка и определяются ее качество и себестоимость.
Связи более низкого уровня обеспечивают действие связей более высокого уровня. Например, размерные связи в технологическом процессе изготовления детали создаются с помощью кинематических связей, последние обеспечиваются действием либо механических, либо гидравлических, либо каких-то других связей, создающих необходимые относительные движения инструментов и заготовки.
Таким образом, и в производственном процессе изготовления машины идет преобразование связей, их переход из одного вида в другой. И только за счет этого производственный процесс функционирует.
ЛЕКЦИЯ 4
3. БАЗИРОВАНИЕ И РАЗМЕРНЫЕ ЦЕПИ
3.1. Основы базирования
Задачи определения положения детали в машине и в процессе ее контроля, заготовки при обработке на станке или их базирование занимают центральное место в процессе создания машины. От того, как они решены, во многом зависит качество деталей и машины в целом.
Вопросам базирования и в нашей стране, и за рубежом уделено большое внимание и посвящено немало специальных научных трудов. Большой вклад в разработку теории базирования внесен учеными Б.С. Балакшиным, А.И. Кашириным, В.М. Кованом, А.А. Маталиным, А.П. Соколовским, В.П. Фираго и многими другими.
Теорию базирования разрабатывали в двух направлениях. Первое из них преследовало цель обобщения опыта машиностроения и классификации баз в соответствии с терминологией, порожденной практикой. Результатом этого направления явилась чрезвычайно обширная и недостаточно строгая терминология, пользование которой было сопряжено с немалыми трудностями. Основу другого научного направления составила теоретическая механика, ее раздел об определении положения твердого тела в пространстве. Основоположником этого направления был Б.С. Балакшин, разработавший в 40-х годах теорию базирования, положенную в основу ГОСТ 21495–76 "Базирование и базы в машиностроении", созданного под его руководством.
Теоретическая механика рассматривает два состояния твердого тела: покоя и движения. Понятия "покоя" и "движения" являются относительными и имеют смысл только тогда, когда указана система, отсчета.
Требуемое положение или движение твердого тела относительно выбранной системы отсчета достигается наложением геометрических или кинематических связей.
Связями в теоретической механике называют условия, которые налагают ограничения либо только на положение, либо также и на скорость точек тела. В первом случае связь называют геометрической, во втором – кинематической.
Связи обычно осуществляются в виде различных тел, стесняющих свободу движения данного тела. Эффект действия связей такой же, как и действие сил, вследствие чего действие связей можно заменить соответствующими силами, называемыми реакциями связей. Направление реакции связи совпадает с тем направлением, в котором связь препятствует перемещению тела.
Независимые перемещения, которые может иметь тело, называют степенями свободы. Абсолютно твердое тело имеет шесть степеней свободы. Для того чтобы придать телу необходимое положение и состояние покоя относительно выбранной системы отсчета, его надо лишить шести степеней свободы, наложив на него шесть двусторонних геометрических связей.

Если избрать в качестве системы отсчета прямоугольную систему координат OXYZ (рис. 3.1), то при наложении шести геометрических связей 1–6 тело лишится трех перемещений вдоль осей ОХ, ОУ и OZ и трех поворотов вокруг осей, параллельных им, оставаясь неподвижным в системе
OXYZ.
Аналитическое определение требуемого положения абсолютно твердого тела сводится к заданию значений шести независимых параметров, однозначно характеризующих его положение. Сделано это может быть различными способами.
По одному из них с телом связывают неизменно прямоугольную систему координат O1XlYlZl, называемую подвижной. Ее положение в системе OXYZ характеризуют координаты х, у, z начала Ol и три угла Эйлера: θ– угол нутации, ψ – угол прецессии и ϕ – угол собственного вращения системы O1XlYlZl. По значениям этих параметров судят о положении как системы O1XlYlZl так и самого тела относительно системы OXYZ, являющейся системой отсчета.
Положение подвижной системы координат и самого тела будет также определено, если выбрать на плоскости XlOlУ1 три точки, не лежащие на прямой линии, на X1OlZl – две, на Y1O1Z1 – одну и задать значения их координат (рис. 3.2). Поскольку параметру х, у, z, θ, ψ, ϕ аналитически связаны со значениями координат этих шести точек, то такой способ характеристики положения тела в системе OXYZ будет равнозначен изложенному выше. Из восемнадцати координат, определяющих положение шести точек, шесть (z1, z2, z3, у4, у5, х6) будут независимыми. Неизменность их значений есть условие действия шести геометрических связей, наложенных на тело.
Тело находится в неподвижном состоянии, если выполняются два условия:
сумма всех активных сил, действующих на тело, и реакций равна нулю; в начальный момент скорость тела также равна нулю.
Рис. 3.1. Геометрические связи и координаты, определяющие положение твердого тела в системе OXYZ
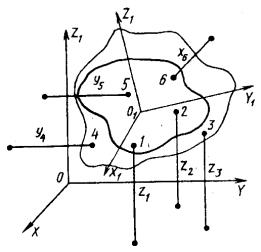
Рис. 3.2. Определение положения твердого тела с использованием координат шести точек, размещенных на плоскостях подвижной системы OlXlYlZl
Если в избранной системе отсчета требуется создать движение тела с определенной скоростью в одном или нескольких направлениях, то соответствующее число геометрических связей должно быть заменено таким же числом кинематических связей.
Под базированием в машиностроении понимают придание заготовке или изделию требуемого положения относительно выбранной системы координат.
Под изделием подразумевают деталь, сборочную единицу, а также режущий и измерительный инструмент, приспособления, приборы и другие объекты, допускающие их представление как абсолютно твердых тел.
Придание детали требуемого положения в избранной системе координат осуществляется в реальной ситуации путем соприкосновения ее поверхностей с поверхностями детали или деталей, на которые ее устанавливают или с которыми ее соединяют. Фиксация достигнутого положения и постоянство контакта обеспечиваются силами, в числе которых первым проявляется действие массы самой детали и сил трения.
Реальные детали машин ограничены поверхностями, имеющими отклонения формы от своего идеального прототипа. Поэтому базируемая деталь может контактировать с деталями, определяющими ее положение лишь на отдельных элементарных площадках, условно считаемых точками контакта.
В общем случае при сопряжении детали по трем поверхностям с деталями, базирующими ее, возникает шесть точек контакта. При этом на контактирующих поверхностях точки контакта распределяются определенным образом.
На рис. 3.3 показана деталь типа прямоугольного параллелепипеда, установленная в "угол", образованный базирующими деталями. Шесть точек контакта распределились на поверхностях детали (соответственно и на поверхностях деталей, на которые она установлена) следующим образом: три точки контакта на нижней поверхности детали, две на боковой поверхности наибольшей протяженности и одна на торцовой поверхности. Такому распределению и местоположению точек контакта способствовали выбор места приложения и соотношений сил N1, N2, и N3
Таким образом, наложение на деталь шести геометрических связей и определение ее положения относительно деталей, на которые она установлена, в реальной жизни осуществляется через точки контакта. Более того, шесть точек контакта материализуют подвижную систему координат О1XlYlZl, связанную через них как с базируемой, так и базирующими деталями.
Рис. 3.3. Сопряжение реальных деталей по трем номинально плоским поверхностям
Из рассмотренного примера видно, что базирование детали было осуществлено с помощью нескольких ее поверхностей – баз.
Базой называют поверхность или выполняющее ту же функцию сочетание поверхностей, ось, точка, принадлежащая заготовке или изделию и используемая для базирования.
Для наложения на деталь шести связей с целью определения ее положения в системе OXYZ и придания ей состояния покоя потребовались три базы, образовавшие подвижную систему O1X1Y1Z1. Совокупность трех баз, образующих систему координат заготовки или изделия, называют комплектом баз. В рассмотренном примере система OlXlY1Zl была построена на точках контакта базируемой детали с деталями, на которые она установлена. При идеализации геометрической формы поверхностей баз считается, что контакт деталей происходит полностью по сопрягающимся поверхностям. И тогда за координатные плоскости принимают поверхности баз, а наличие связей, наложенных на них, отображается опорными точками, носящими теоретический характер.
Опорная точка – это символ одной из связей заготовки или изделия с выбранной системой координат. Условное изображение опорной точки показано на рис. 3.4.
Рис. 3.4. Условное обозначение опорной точки: а – на виде спереди и сбоку; б – на виде сверху

Все опорные точки на схеме базирования нумеруют порядковыми номерами, начиная с базы, на которой располагают наибольшее число опорных точек. Число проекций детали на схеме базирования должно быть достаточным для четкого представления о размещении опорных точек. При наложении в какой-либо проекции одной опорной точки на другую, изображают одну точку и около нее проставляют номера совмещенных точек.
На рис. 3.5 пример, приведенный на рис. 3.3, дан в другой интерпретации: детали сопрягаются по идеально плоским поверхностям, координатные плоскости системы OlXlY1Zl образованы самими базами. Здесь же показана схема базирования устанавливаемой детали.
Рис. 3.5. Идеализированное представление о сопряжении деталей по плоским поверхностям
3.1.1. Классификация баз
Несмотря на разнообразие задач по базированию, оказалось возможным ограничиться тремя признаками при классификации баз: по назначению, по лишаемым степеням свободы и по характеру проявления.
Классификация баз по назначению. Базирование необходимо на всех стадиях создания изделия: при конструировании и рассмотрении его в сборе, при изготовлении и измерении. Отсюда вытекает необходимость разделения баз по назначению на три вида: конструкторские, технологические и измерительные.
Конструкторской называют базу, используемую для определения положения детали или сборочной единицы в изделии. Группу конструкторских баз составляют основные и вспомогательные базы (рис. 3.6).

Рис. 3.6. Основные и вспомогательные базы деталей
Основной называют конструкторскую базу, принадлежащую данной детали или сборочной единице и используемую для определения их положения в изделии.
Вспомогательной называют конструкторскую базу, принадлежащую данной детали или сборочной единице и используемую для определения положения присоединяемого к ним изделия (детали или сборочной единицы).
Из определения понятий основной и вспомогательной баз видно различие их функций. С помощью комплекта основных баз определяют положение самой детали в машине или в сборочной единице. С помощью комплекта вспомогательных баз определяют положение относительно, данной детали присоединяемой к ней детали или сборочной единицы.
Можно заметить, что любая деталь может иметь только один комплект основных баз и столько комплектов вспомогательных баз, сколько деталей или сборочных единиц к ней присоединяется.
Технологической называют базу, используемую для определения положения заготовки или изделия в процессе изготовления или ремонта. Понятие технологической базы распространяется на все стадии процесса изготовления изделия (на изготовление детали механической обработкой, на сборку изделия и т.д.).
Измерительной называют базу, используемую для определения относительного положения заготовки или изделия и средств измерения. Измерительные базы необходимы во всех случаях измерений (при оценке точности детали, в процессе настройки станков и т.д.)
Классификация баз по лишаемым степеням свободы. Законы базирования являются общими для всех стадий создания изделий. Поэтому независимо от назначения базы различают в зависимости от их участия в наложении связей на базируемые заготовки, детали или сборочные единицы.
Комплект баз может быть образован сочетанием поверхностей разных

размеров и конструктивных форм (плоских, цилиндрических, конических и др.), и распределение шести связей между ними может быть различным. С точки зрения числа и свойств воспринимаемых связей база может быть установочной, направляющей, опорной, Двойной направляющей или двойной опорной.
Установочной называют базу, используемую для наложения на заготовку или изделие связей, лишающих их трех степеней свободы – перемещения вдоль одной координатной оси и поворотов вокруг двух других осей.
Например, если деталь призматическая (рис. 3.7), роль установочной базы выполняет нижняя поверхность, использованная для наложения трех связей, лишающим деталь возможности перемещаться в направлении оси OZ и поворачиваться вокруг осей, параллельных ОХ и OY.
Направляющей называют базу используемую для наложения на заготовку или изделие связей, лишающих их двух степеней свободы – перемещения вдоль одной координатной оси и поворота вокруг другой оси. Для детали призматической формы – это боковая поверхность детали, наложение через которую двух связей на деталь лишило ее возможности перемещения в направлении оси OY и поворота вокруг оси, параллельной OZ.
Рис. 3.7. Наложение шести связей на призматическую деталь
Опорной называют базу, используемую для наложения на заготовку или изделие связи, лишающей их одной степени свободы – перемещения вдоль одной координатной оси или поворота вокруг оси.
В данном случае в качестве опорной базы использована одна из торцовых поверхностей детали. Через эту поверхность у детали! отнята возможность перемещения в направлении оси ОХ.
Комплект баз, в состав которого входит установочная, направляющая и опорная базы, представляет собой подвижную систему координат O1X1Y1Z1, на которую наложены те же связи, что и на деталь: три связи на координатную плоскость XlOlYl, две – на X1OlZl и одна – на Y1O1Z1. Данный комплект баз является весьма распространенным и может считаться типовым.
Если базирование детали или заготовки осуществляется с использованием цилиндрической (конической) поверхности большой

протяженности (соотношение ее длины и диаметра больше единицы), то с помощью этой поверхности на деталь или заготовку можно наложить четыре связи. Такая база получила название двойной направляющей.
Двойной направляющей называют базу, используемую для наложения на заготовку или изделие связей, лишающих их четырех степеней свободы – перемещений вдоль двух координатных осей и поворотов вокруг осей, параллельных им.
Наложение связей на деталь или заготовку с помощью цилиндри ческой (конической) поверхности чаще всего осуществляется через ось (рис. 3.8.), относительно которой она образована вращением образующей прямой. Это может служить основанием для совмещения с этой осью оси О1Х1 подвижной системы O1X1Y1Z1. Рассматривая ось О1Х1 как пересечение координатных плоскостей X1O1Y1 и X1O1Z1, две связи (1 и 2) из четырех, наложенных на ось, можно отнести к координатной плоскости X1O1Y1, две (3 и 4) – к X1O1Z1. Эти связи отбирают у детали возможность перемещаться вдоль и поворачиваться вокруг осей, параллельных OY и OZ. Перемещения детали вдоль оси О1Х1 может лишить связь 5, наложенная на торец детали и координатную плоскость У1О1Z1, совмещенную с ним. Угловое положение детали будет определено, если на координатную плоскость X1O1Y1 наложить дополнительно связь 6. Последние две связи реализуются при помощи двух опорных баз, одна из которых отбирает у детали возможность перемещения, другая – поворота.
Рис. 3.8. Наложение шести связей на цилиндрическую деталь
Комплект из двойной направляющей и двух опорных баз широко распространен и может считаться также типовым.
Часты случаи, когда двойную направляющую базу образует сочетание Двух цилиндрических или конических поверхностей небольшой протяженности (Рис. 3.9). Роль двойной направляющей могут выполнять две опорные шейки вала (рис. 3.9, а), по которым его базируют на подшипниках в корпусе, во втором – конические отверстия (рис. 3.9, б), с помощью которых