

Фишбейн, механика
.pdf
|
|
), лежащих в плоскости диска и равных по моду- |
|
|
|
|||||||||||||||||||||||||
лю. Верным для угловых ускорений диска является |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
ε |
> |
|
ε |
> |
ε |
, |
< |
ε=,0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
ε |
< |
|
ε |
< |
ε |
|
ε , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
соотношение … |
|
|
|
= |
ε . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
ε |
= ε |
= ε |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
ε |
|
|
|
ε |
|
|
ε |
|
ε |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение > |
|
; |
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
Для частного случая враща- |
|||||||||||||
|
|
|
|
|
Считаем момент сил относительно точки О. |
|||||||||||||||||||||||||
тельного движения, основное уравнение динамики имеет вид |
|
|
|
|||||||||||||||||||||||||||
Так как |
|
|
|
|
|
|
|
|
|
|
|
|
|
ε |
= |
|
. |
, |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
|
|
плечо силы, |
т. е. длина |
перпендикуляра опущенного из т. |
О |
на линию |
|||||||||||||||||||||||
|
|
|
= |
· |
|
|
|
|
|
|
||||||||||||||||||||
действия силы, то |
|
> |
|
> |
|
= 0. |
> |
|
= 0. |
|
|
|
|
|||||||||||||||||
|
|
|
|
Диск может> |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Так как все силы равны по |
модулю, то |
|
|
|
|
|
||||||||||||||||||||||||
|
> |
> |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
ε |
|
|
ε |
|
|
ε |
|
ε |
|
|
|
|
|
|
|
|
|
|
|
|
13. |
, |
, |
|
|
|
|
|
|
вращаться вокруг оси, перпенди- |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
диска |
и |
проходящей через |
|
|
|
|
|||||||||||||
кулярной |
|
плоскости |
|
|
|
|
||||||||||||||||||||||||
его центр. В точке А прикладывают одну из сил |
|
|
|
|
||||||||||||||||||||||||||
( |
|
|
|
|
|
|
|
или |
|
|
), лежащих |
в |
плоскости |
|
диска. |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
= |
|
|
= |
|
, |
|
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Верным для моментов этих сил относительно |
|
|
|
|||||||||||||||||||||||||||
рассматриваемой оси является соотношение … |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
< |
|
|
< |
|
, |
< |
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
> |
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Решение |
|
|
< |
|
|
< |
|
, |
|
= 0 |
= |
|
sin |
, |
|
|
|
|
|
|||||||||||
|
|
|
|
α |
|
|
угол между |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
По определению |
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
sin |
|
− |
|
|
направлением |
|
радиус-вектора точки |
приложения силы |
|||||||||||||||||
радиус- |
|
|
|
|
|
|
|
|
|
50 |
|
|
|
|
. |
|
|
|
||||||||||||
( |
совпадает |
|
|
|
с |
|
|
направлением ) |
|
и |
|
направлением |
силы. С |
другой |
||||||||||||||||
|
|
|
|
− |
|
|
|
|
|
|
|
|
||||||||||||||||||
стороны |
|
|
|
|
α |
|
это |
проекция |
силы |
|
на |
направление, перпендикулярное |
||||||||||||||||||
|
|
|
|
|
|
вектору, т. е. |
|
на направление, совпадающее с |
|
|
|
|
||||||||||||||||||

|
|
|
на это , |
, |
|
на направление, совпадающее с |
|
Из рисунка видно, что проекции сил |
= |
, |
|
||||
|
, одинаковые, а проекция |
|
= |
|
= 0. |
||
|
|
|
направление равна нулю. Таким образом, |
||||
имеем
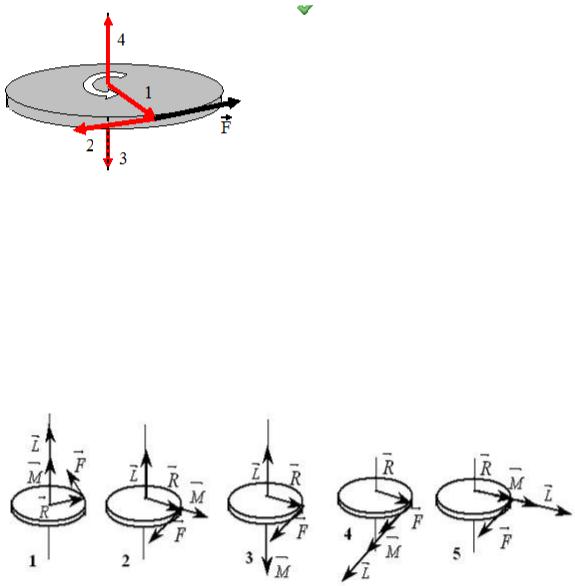
14. Диск равномерно вращается вокруг вертикальной оси в направлении, указанном на рисунке белой стрелкой. В некоторый момент времени к ободу диска была приложена сила, направленная по касательной. При этом правильно изображает направление углового ускорения диска вектор …
 4 1 2 3
4 1 2 3
Решение |
|
|
|
ε |
|
|
|
|
|
|
|
|||
Так как |
|
|
|
|
= . |
|
|
|
|
|
||||
|
В частном случае основное уравнение вращательного движения |
|
||||||||||||
то |
|
|
|
|
|
|
|
|
|
правого винта) |
и, следовательно, |
|
||
|
направлено вдоль вектора 4 (правило |
|
, |
|
|
ε |
||||||||
направлено |
вдоль вектора 4. |
= |
× |
|
|
|
|
|||||||
Дополнение. Соединяем вектора |
|
и |
|
началами и вращаем правый винт по |
||||||||||
|
|
|
|
|
|
|
векторном произведении |
ко второму |
||||||
кратчайшему пути от первого вектора в |
|
|
|
|
|
|||||||||
вектору . Тогда поступательное движение правого винта укажет на направле- |
||||||||||||||
ние |
вектора |
. |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
15. Диск равномерно вращается вокруг вертикальной оси в направлении, указанном на рисунке белой стрелкой. В некоторый момент времени к ободу диска была приложена сила, направленная по касательной. До остановки диска правильно изображает направление угловой скорости вектор
 4 1 2 3
4 1 2 3
51
тела правилом правого винта (см. теорию). В данном случае вектор ω ориентирован в направлении 4. После приложения силы движение становится замедленным, но тело продолжает вращаться в ту же сторону вплоть до остановки.
Решение
Направление вектора угловой скорости ω связано с направлением вращения
16. Диск вращается вокруг вертикальной оси в направлении, указанном на ри-
сунке белой стрелкой. К ободу колеса приложена сила , направленная по ка-
силы |
|
вектор … |
сательной. Правильно изображает направление момента |
|
|
4 |
|
|
1 |
|
|
2 |
|
|
3 |
|
|
Решение |
|
|
Момент |
силы определяется соотношением |
, где – ра- |
диус-вектор точки приложения силы. Направление вектора момента силы можно |
|||||||
|
|
|
|
|
|
|
|
определить по правилу векторного произведения или |
по правилу правого винта |
||||||
|
|
|
|
|
= × |
|
|
(буравчика). Таким образом, момент силы |
правильно изображает вектор 4. |
||||||
Дополнение. Смотри задачу 14. |
|
||||||
17. Направления векторов момента импульса и момента силы |
для равноза- |
||||||
медленного вращения твердого |
тела правильно |
|
показаны |
на рисунке… |
|||
 3 1 4 5
3 1 4 5
52
Решение |
|
|
|
|
|
|
= |
|
× |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так как сила |
|
лежит в плоскости, перпендикулярной оси вращения, то |
|||||||||
при задании |
момента относительно центра диска |
|
|
|
|
|
, он направлен |
||||
|
|
|
|
|
|
|
|
|
|
|
|
вдоль оси, т. е. |
1 или 3 вариант. Точнее направления |
|
и |
|
связаны правилом |
||||||
правого винта. При задании момента относительно |
центра диска при замед- |
||||||||||
|
|
|
|
|
|||||||
ленном вращательном |
движении имеем |
L ¯ M . Этому условию соответст- |
|||||||||
вует только рисунок 3.
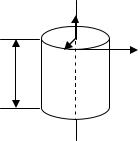
18. Алюминиевый и стальной цилиндры имеют одинаковую высоту и равные массы. На цилиндры действуют одинаковые по величине силы, направленные по касательной к их боковой поверхности. Относительно моментов сил, действующих на цилиндры, справедливо одно из следующих суждений
моменты сил, действующие на цилиндры, равны нулю на стальной цилиндр действует больший момент сил, чем на алюминиевый
на алюминиевый цилиндр действует больший момент сил, чем на стальной
моменты сил, действующие на цилиндры, одинаковы
Решение
Так как цилиндры имеют одинаковую массу и высотуH, и объем цилин- |
|||||||||||||||||||
= |
|
|
|
|
= |
ρ |
,π |
|
= |
|
|
|
ρ |
π |
, |
||||
дра равен |
произведению |
площади |
|
|
основания на ,выстоту из условия |
||||||||||||||
|
следует ( |
|
ρ |
|
|
|
π |
= |
|
|
ρ |
|
|
|
|
||||
|
|
|
|
|
|
|
), |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
. |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
О, |
|
|
> |
|
. |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
ρ |
|
|
||||||||
Так как ρ |
|
ρ |
то |
|
= |
По определению модуль момента силы от- |
|||||||||||||
носительно |
точки |
равен |
|
sin 2 |
= |
, |
|||||||||||||
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
π
53
и на цилиндры действуют одинаковые силы |
, то при условии, что |
> |
, |
|
получаем |
> |
. |
||
|
|
|||
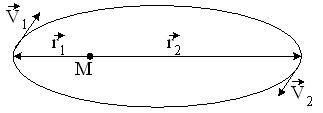
19. Планета массой m движется по эллиптической орбите, в одном из фокусов
которой находится звезда массой
М. Если r – радиус-вектор плане-
ты, то справедливым является ут-
верждение:
момент импульса планеты относительно центра звезды при движении по орбите изменяется;
момент силы тяготения, действующей на планету, относительно центра звезды равен нулю;
соотношение, связывающее скорости планеты V1 и V2 в точках минимального
и максимального ее удаления от звезды с расстояниямиr и r , имеет вид
1 2
V1 /V2 = r1/r2.
Решение Примечание. Буквой М обозначается масса звезды(для решения задачи не
понадобится) и модуль момента силы, действующей на планету.
По определению момент силы тяготения, действующей на тело, относи-
r |
|
= [ × |
, |
= |
, |
тельно звезды равен |
|
|
|
|
|
где r - радиус-вектор материальной точки относительно т. О, a – угол между
радиус-вектором и силой тяготения. Так как радиус-вектор направлен от звезды к телу, а сила притяжения – от тела= к звездеsin180, то =угол0 равен 180°. Тогда
° ,
т. е. момент силы тяготения, действующей на планету, относительно центра звезды равен нулю. (Второе утверждение верно).
54

Полное решение |
|
= |
= 0, |
то |
= const, |
|
|
||||
Так как |
|
|
|||
т. е. момент импульса планеты относительно |
центра звезды при движении по |
||||
орбите не изменяется. (Первое утверждение не верно). По определению момент
|
|
= [ × |
] |
= |
|
импульса тела относительно звезды равен |
|
|
|||
r |
|
|
, |
|
, |
где r |
- радиус-вектор материальной точки относительно .т О, α – угол между |
||||
радиус-вектором и импульсом тела. Тогда в точках минимального и максималь-
|
= |
sin90 |
т.=. |
, |
|
то= |
sin90 = |
. |
ного удаления от звезды (см. рисунок) |
a равен 90°, т. е. |
|
||||||
|
|
= const, |
° |
= |
, |
/ |
° |
|
Так как |
|
= |
|
|
= / . |
|
||
|
е |
|
|
|
|
|
||
|
|
|
|
или |
|
|
|
|
Следовательно, третье утверждения неверно.
20. Диск радиусом 1 м, способный свободно вращаться вокруг горизонтальной оси, проходящей через точку О перпендикулярно плоскости рисунка, отклонили от вертикали на угол π/2 и отпустили. В начальный момент времени угловое ускорение диска равно ……… c-2
 7 10 5 20
7 10 5 20
Решение
Сила тяжести и импульсы точек диска лежат в вертикальной плоскости, перпендикулярной горизонтальной оси вращения, проходящей через т.О.
Модуль момента силы тяжести относительно точкиО, в начальный момент времени= равен
,
где R – радиус диска (плечо силы). Момент инерции диска относительно горизонтальной оси, проходящей через центр тяжести (точку С), равен
55
|
= |
с |
|
|
= 3 |
|
. |
|||
|
с + |
|
|
|
||||||
Момент инерции диска |
относительно горизонтальной оси, проходящей через |
|||||||||
|
|
|
|
= |
2 |
. |
|
|
|
|
точку О, найдем по теореме Штейнера: |
|
|
|
|
||||||
ε = = 2 |
|
= 2 |
|
≈ 7 с . |
||||||
Для частного случая основной закон вр |
ащательного движения имеет вид |
|||||||||
|
|
|
2 |
|
||||||
|
|
|
|
|
||||||
21. К стержню приложены три |
одинаковые по модулю силы, как показано на |
|||||||||
3 |
|
|
3 |
|
|
|
||||
рисунке. Ось вращения перпендикулярна плоскости рисунка и проходит через точку О. Вектор углового ускорения направлен…. 
вдоль оси вращения «к нам»
вдоль оси вращения «от нас»
влево
вправо
Решение
По определению момент силы равен
r
M =[ r ´ F ], M = lF,
где l – плечо вектора F (длина перпендикуляра, опущенного из т. О на линию
вектора F ), rr - радиус-вектор точки приложения силы относительно т. О. Как следует из рисунка
|
|
|
|
l3 + l1 > l2 . |
|
|
|
|
|
|
|
|
|
|
Суммарный момент сил, действующий на стержень равен |
||
l2 |
l1 |
|
l3 |
M = M1 + M2 + M3 . |
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
Вектор |
M2 =[ r2 ´ F2 ]( M2 = l2 F ) направлен |
вдоль оси |
|
|
|
|||
|
|
|
вращения «к нам» (по определению направления векторного |
||
|
|
|
|
|
r |
произведения векторов, т. е. |
правила правого винта), а вектора |
M1 =[ r1 ´ F1 ] |
|||
|
|
|
|
56 |
|
( M1 = l1F ) и M3 = |
r |
´ F3 ]( M3 = l3F ) |
|
|
|
|
[ r3 |
направлены одинаково вдоль оси вра- |
|||||
щения «от нас». |
|
|
|
|
|
|
Пусть |
|
M1 + M3 = M¢. |
|
|||
Тогда |
|
|
||||
|
M ¢ = (l1 + l3 )F > l2 F = M 2 . |
|
||||
|
|
|
||||
Так как вектора M2 |
и |
M ¢ направлены вдоль одной прямой, но в разные сторо- |
||||
ны, то их сумма |
|
|
|
|
|
|
|
|
M = M¢ + M2 |
|
|||
направлена в сторону большего по |
модулю вектора, . |
е. M ¢ . Из основного |
||||
уравнения вращательного движения следует, что |
|
|||||
|
|
|
|
r |
|
|
|
|
r |
M |
|
||
|
|
e = |
|
|
|
|
|
|
|
J , |
|
||
|
|
|
|
|
||
где J > 0 -момент |
инерции стержня. |
|
r |
r |
||
Следовательно, e |
направлен как M |
|||||
вдоль оси вращения «от нас».
57

РАБОТА И ЭНЕРГИЯ. ЗАКОНЫ СОХРАНЕНИЯ В МЕХАНИКЕ
Произвольное движение
Работа A силы F по перемещению материальной точки из т.1 в т.2
|
A1,2 |
2 |
2 r r |
2 |
|
|
|
|
|
2 |
|
|
|
|
|||
|
= òdA |
ò=Fdr |
ò=F cos adr |
|
|
ò(F=x dx + Fy dy) [Дж]. |
|
||||||||||
|
|
|
1 |
1 |
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
Если F = const= (Fx |
const, Fy = const) , то |
|
|
|
|
||||||||||||
|
A1,2 |
= Fx Dx + Fy Dy [Дж], |
где |
|
Dx |
=x2 |
- x1 , Dy =y2 - y1 . |
|
|||||||||
Если F = const, a = const , то |
|
|
|
|
|
|
|
|
|
|
|||||||
|
A1,2 |
= FS cos a[Дж], |
где a -угол между F и u, S -путь. |
|
|||||||||||||
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если F = iFx , то |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1,2 |
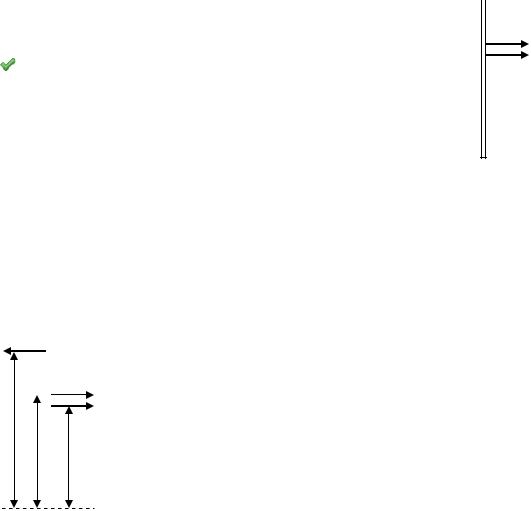
= ò Fx dx – площадь под кривой Fx |
от x с учетом знака. |
|
|||||||||||||
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мгновенная мощность N силы |
|
|
F |
|
|
|
|
|||||||||
|
dA |
|
r r |
|
|
|
|
|
|
|
|
|
|
|
r |
r |
|
N = |
= |
|
F u =Fx ux |
+ Fy uy =Fucos a [Вт], где a -угол между F |
и u. |
||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
Средняя мощность < N > силы |
|
|
|
|
|
|
||||||||||
|
|
F |
|
|
|
|
|||||||||||
< N > = |
A |
[Вт]. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определение знака работы и мощности |
|
|
|
|||||||||||||
|
|
|
|
|
r |
r |
|
|
|
|
|
|
|
|
|
|
|
Если угол a между F |
и u острый, то A, N > 0 , тупой, то A, N < 0. |
|
|||||||||||||||
|
|
|
|
|
r |
Вращательное движение |
|
||||||||||
Работа A силы |
|
|
|
|
|
вокруг неподвижной оси на угол j от |
|||||||||||
F при повороте тела |
|||||||||||||||||
положения 1 до положения 2 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
A1,2 |
2 |
j |
r r |
j r r |
|
|
|
j |
|
|
|
|
|
|
||
|
= òdA |
=òM dj |
òMw=dt |
|
|
òM= z djz [Дж], |
|
||||||||||
|
r |
|
1 |
0 |
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
где M -момент силы. |
|
|
j |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если M |
z |
= const , то |
|
A |
= |
ò |
M |
z |
dj= |
M |
Dj [Дж] . |
|
|||||
|
|
|
|
|
|
1,2 |
|
|
|
|
z |
z |
|
|
|||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
58
Определение знака работы A и мощности N
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( L, w-вектора момента импульса и угловой скорости) |
|
|||||||||||||||||
Если |
|
|
|
|
|
r |
A, N |
> 0 |
|
|
|
|
|
r |
|
|
|
||
M L,w, то |
, M ¯ L,w, то A, N < 0. |
|
|||||||||||||||||
|
Потенциальная энергия тела U в поле консервативной силы F |
|
|||||||||||||||||
U = mgh - в |
поле |
|
силы |
|
тяжести, |
h -высота |
над нулевым |
уровнем, |
|||||||||||
U = |
kx2 |
- в поле силы упругости, |
x, k -деформация и жестк. пружины. |
||||||||||||||||
2 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
потенциальной |
энергии |
||
|
Связи |
консервативной силыF (x, y, z) и |
|||||||||||||||||
U (x, y, z) тела в поле этой силы |
|
r ¶U |
|
|
|
||||||||||||||
r |
|
|
|
|
|
r |
r ¶U |
r |
|
¶U |
|
|
|
|
|||||
F = -gradU , F = -(i |
|
+ j |
|
|
+ k |
|
|
); |
|
|
|||||||||
¶x |
|
¶y |
¶z |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
¶U |
|
¶U |
|
|
|
¶U |
|
|
|
|
|
|
|
||||
Fx = - |
= |
|
, Fy |
- |
= |
|
, Fz |
- |
|
|
. |
|
|
|
|
|
|
||
|
|
|
¶z |
|
|
|
|
|
|
||||||||||
|
|
¶x |
|
¶y |
|
|
|
|
|
|
|
|
|
|
|||||
Кинетическая энергия
T = mv2 - поступательного движения тела со скоростью v .
2
T= 1 J w2 -вращательное движения вокруг неподвижной оси с частотой w.
2
T = |
1 |
mvc2 + |
1 |
|
J w2 - плоского движения тела, катящегося по плоскости со |
||||||
|
|
|
|
||||||||
2 |
2 |
|
|
|
|
|
и вращающегося с чаcтотой w относительно оси, |
||||
скоростью центра масс vc |
|
||||||||||
проходящей через центр масс. |
|||||||||||
T = |
1 |
mvc2 + |
1 |
J w2 |
|
|
- |
плоского движение тела, катящегося без |
|||
|
|
||||||||||
|
|
|
|
||||||||
2 |
2 |
|
|
vc=wr |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
проскальзывания, r -радиус колеса, цилиндра, шара. Кинетическая энергия системы тел равна сумме кинетических энергий тел системы.
Законы |
изменения кинетической T , потенциальной U и полной |
||
механической E =U + T энергии. (Другой способ вычисления работы). |
|||
DT |
T=2 -T1 |
=A1,2 - |
работа всех сил; |
-DU |
U= 1 -U2 =A1,2 |
-работа консервативных(ной) сил(ы); |
|
DE |
E=2 - E1 |
=A1,2 - |
работа неконсервативных(ной) сил(ы). |
59