

1 курс 1 ый семестр / физика / лабораторные / Двояшкин_М_Н___Черкасс_М_А___Двояшкин_Н_К___Кабиров_Р_Р___Мо«Механика_и_молекулярная_физика»_Лабораторный_практикум_по_д
.PDFсилы F, приложенной к телу параллельно поверхности его соприкосновения со |
||||||||||||||||||||||
столом, тело остается в покое. Наибольшее значение силы трения, при |
||||||||||||||||||||||
котором скольжение еще не наступает, называется максимальной силой |
||||||||||||||||||||||
трения покоя ( Fтр = −F ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ка |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
F – сила, приложенная к телу; |
||||||||||
|
|
|
|
|
r |
|
|
|
|
|
Fтр |
– сила трения; |
|
|
т |
е |
||||||
|
|
|
|
|
N |
|
|
r |
|
|
N – сила реакции опоры |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|||
|
Fтр |
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
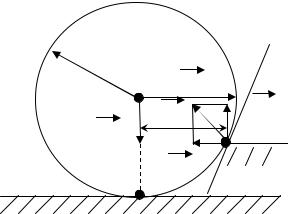
Рис. 2. Силы взаимодействия Fтр |
, |
N |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Французский физик Ш. Кулон эксперимента ьно установили |
закон о том, |
||||||||||||||||||||
что максимальное значение модуля си ы трения покоя прямо |
||||||||||||||||||||||
пропорционально модулю силы реакции опоры: |
л |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
r |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
= μп |
|
|
|
|
|
|
|
(1) |
|||
|
|
|
|
|
|
|
|
|
|
Fтр.max |
|
|
N , |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где μn - коэффициент трения покоя, характеризует обе трущиеся поверхности и |
||||||||||||||||||||||
зависит не только от материала этих поверхностей, но и от качества их |
||||||||||||||||||||||
обработки. |
|
Коэффициент |
|
трения |
|
определяется |
экспериментально. |
|||||||||||||||
Максимальная сила трения покоя не зависит от площади поверхности |
||||||||||||||||||||||
соприкасающихся тел. |
|
|
|
ая |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Трение скольже ия воз икает при относительном перемещении |
|||||||||||||||||||||
соприкасающихся |
тел. |
Сила |
трения скольжения всегда |
направлена в |
||||||||||||||||||
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сторону, противополож ую от осительной скорости соприкасающихся тел. |
||||||||||||||||||||||
|
При скольжении сила трения зависит не только от состояния трущихся |
|||||||||||||||||||||
поверхностей, |
но |
и |
т |
н |
|
|
|
|
|
|
|
|
движения тел, |
причем эта |
||||||||
тносительной скорости |
||||||||||||||||||||||
зависимость от ско ости является довольно сложной. |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При не слишком больших относительных скоростях движения сила |
|||||||||||||||||||||
трения скольжения мало отличается от максимальной силы трения покоя. |
||||||||||||||||||||||
|
Сила |
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рения скольжения рассчитывается по формуле: |
|
|
|
|
|
||||||||||||||||
|
|
|
|
т |
|
|
|
|
|
r |
|
= μск. |
r |
, |
|
|
|
|
|
|
(2) |
|
|
|
|
|
|
|
|
|
|
Fтр.ск. |
|
N |
|
|
|
|
|
|
|||||
где μск. |
- коэффициент трения скольжения, причем μск. < μп ; μск. |
< 1; N – сила |
||||||||||||||||||||
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
реакции опоры. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Ес и тело находится на наклонной плоскости с углом наклона α0 , |
то оно |
||||||||||||||||||||
|
|
е |
|
|
|
|
|
|
|
|
когда тангенциальная составляющая Fτ |
|||||||||||
приходит в движение только тогда, |
||||||||||||||||||||||
Э |
л |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
91 |
|
|
|
|
|
|
|
|
|
|
||

силы тяжести Fтяж больше силы трения |
|
Fтр |
(см. |
рис. 3). Следовательно, в |
|||||||||||||||||||
начале скольжения тела (предельный случай, α = α0 ). |
|
|
|
|
|
|
ка |
||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
Fτ = Fтр |
|
или Fтяж sinα0 = μFтяж cosα0 |
|
|
|
|
|
(3) |
|||||||||
|
|
|
|
|
|
|
|
|
|
μ = tgα0 |
|
|
|
|
|
|
|
|
|
|
е |
(4) |
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
т |
|
|||
|
|
|
|
|
|
|
|
Fτ |
|
Fтр |
|
|
и |
о |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
α0 |
|
Fn |
|
л |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
α0 |
|
Fтяж. |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Рис. 3. Предельный случай, когда тело на нак онной плоскости начинает |
||||||||||||||||||||||
движение |
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
||
|
Таким образом, коэффициент трения равен тангенсу угла α0 |
, при котором |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
начинается скольжение тела по наклонной плоскостиб. |
|
|
|
|
|
|
|||||||||||||||||
|
Когда одно тело катится по поверхности другого, возникает сила трения |
||||||||||||||||||||||
качения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При качении по плоской поверхности |
тел, |
имеющих форму круглых |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
ая |
|
|
|
|
|
|
|
|
|
|
|
|
||
цилиндров или шаров, возникают не только упругие, но и пластические |
|||||||||||||||||||||||
деформации. Поэтому линия действия реакции |
R плоскости не совпадает с |
||||||||||||||||||||||
линией действия силы нормального д вления N (см. рис. 4). |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
о |
н |
н |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
т |
р |
|
|
|
|
N |
R |
|
|
RH |
|
|
|
|
|
|
||||
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
л |
|
|
|
|
|
|
|
|
|
Fтр. кач |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4. Возникновение силы трения качения |
|
|
|
|
|
|
|
|
||||||||||||||
Э |
R ен - нормальная составляющая |
|
силы |
R , численно |
|
|
равная N , |
||||||||||||||||
|
|
|
|
|
|
|
|
92 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
горизонта ьная составляющая |
Fтр.кач. представляет собой силу трения качения: |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fтр.кач = μк |
r |
(закон Кулона), |
|
|
|
|
|
(6) |
|||||||||
где r - радиус катящегося колеса, μк - коэффициент трения качения, имеющий
размерность длины и зависящий от материала тел, состояния их поверхностей, от скорости качения.
Пара сил R H и N , приложенных к катящемуся телу, создают момент силы трения М , равный:
|
M = Fтр.качr = μкач N |
|
|
|
|
(7) |
|
|
Теория метода и описание установки |
|
е |
ка |
|||
|
|
|
|||||
|
|
|
|
|
|
|
|
Трение |
качения возникает при |
перекатывании |
цилиндрического или |
||||
сферического |
тела по поверхности |
другого тела. |
|
|
т |
|
|
В качестве примера |
|||||||
|
|
|
и |
о |
|
|
|
рассмотрим шар радиуса r и массой m, |
лежащий на гор зонтальной плоскости |
|||||||||||
(см. рис. 5). |
|
|
|
|
|
|
|
|
|
|
б |
л |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
r |
m |
|
|
|
и |
|
|||
|
|
|
|
|
|
|
|
|||||
|
|
|
О |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Q |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
б |
|
|
|
|
N |
|
|
|
|
|
Fтяж. |
µ |
N |
|
|
|
|
|
|
|
|
|
|
ая |
|
Fтр |
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
н |
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 5. Шар на горизонтальной плоскости в реальном случае |
||||||||||||
Приложим к шару силу Q , большую, чем сила трения покоя: |
||||||||||||
|
|
о |
|
|
Fтр = μп N , |
|
|
|
|
(8) |
||
|
|
|
|
|
|
|
|
|
|
- нормальная реакция опоры. |
||
где μп - статический коэффициент трения, |
|
N |
|
|||||||||
|
р |
|
|
|
и поверхности возникает сила трения меньшая, |
|||||||
Тогда в точке А касания шаран |
|
|||||||||||
чем сила Q . Сила N |
у авновешивает силу тяжести |
r |
||||||||||
Fтяж = m× g ( g - ускорение |
||||||||||||
свободного падения), |
а под действием пары сил Q и Fтр будет происходить |
|||||||||||
к |
|
|
|
|
|
|
|
|
|
|
|
|
качение шара. |
|
|
|
|
|
|
|
|
|
|
|
|
В реальных условиях при взаимодействии шара и плоскости их |
||||||||||||
поверхности деформируютсят |
|
(см. рис. 5), |
и |
касание их происходит вдоль |
||||||||
→
некоторой линии АВ. При действии на шар внешней силы Q сила реакция опоры им т точку приложения, смещенную к точке В, т.е. в сторону действия
Э |
→ |
|
→ |
смещение растет. Это приводит к |
|
93 |
|||
си ы Q ена шар. |
С увеличением силы |
Q |
||
появлению момента реакции опоры относительно оси вращения шара, |
|
препятствующегол |
его вращению. Этот момент носит название момента силы |

трения качения и может быть записан в виде M1 = μ |
× N¢. В |
предельном |
|
|
|
к |
|
положении на шар будет действовать пара сил с моментами: |
(9) |
||
М2 |
= Qпр × R |
|
|
и |
= μк × N ' , |
|
(10) |
M1 |
|
||
уравновешивающими друг друга. Из равенства моментов находим знач ние |
||||||||||||||||
предельной силы: |
|
|
|
|
μ k × N ′ |
|
|
|
т |
е |
ка |
|||||
|
|
|
Q п р |
× R = |
|
|
|
(11) |
||||||||
|
|
|
Q пр |
= |
μ |
k |
× N |
′ |
, |
|
|
|
|
(12) |
||
|
|
|
|
|
|
|
|
|||||||||
где μk - |
|
|
|
|
R |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
коэффициент трения качения. |
При |
Qпр |
= Fтр.кач |
нач нается качение |
||||||||||||
шара. |
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Коэффициент трения существенно отличается от коэффициентов трения |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
характеризует |
||
покоя и скольжения тем, что является размерной ве ичиной и |
||||||||||||||||
плечо силы давления опоры |
относительно |
|
оси |
шара, |
μк |
– |
измеряется в |
|||||||||
единицах |
длины; |
[ μк ]=[1м], |
значение |
его |
|
л |
от |
материала тела |
||||||||
зависит |
||||||||||||||||
соприкасающейся с ним поверхности и определяетсябопытным путём. |
|
|||||||||||||||
При |
одних |
и тех же |
условиях |
для |
двух |
тел сила |
трения качения |
|||||||||
|
|
|
|
|
|
|
б |
|
и |
|
|
|
|
|
|
|
значительно меньше, чем силы трения покоя и скольжения. Поэтому в технике, |
|||||||||||
когда это возможно, стремятся заменить скольжение качением. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
ая |
|
Для исследования трения качения в данной работе используется |
||||||||||
наклонный маятник (см. рис. 6). |
|
|
|||||||||
|
Шарик 1 массой m подвешен на нити длиной L . Он давит на наклонную |
||||||||||
плоскость 2, |
|
угол наклона плоскости β . Если шарик вывести из положения |
|||||||||
|
|
|
|
|
|
|
|
|
н |
|
|
равновесия, то он будет катиться по плоскости и его движение примет характер |
|||||||||||
|
|
|
|
|
|
|
|
∆Lн |
|
|
|
затухающих колебаний под действием сил внешнего трения (рис. 8). |
|||||||||||
|
|
|
|
|
|
р |
о |
|
|
α0 |
αn |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
т |
|
|
|
|
β |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
к |
|
|
|
|
|
|
||
|
Рис. 6. Движение шарика по наклонной плоскости |
||||||||||
|
|
е |
|
|
|
|
|
|
|
|
|
Э |
1 – основание; 2 – вертикальная стойка; 3 – нижний кронштейн; 4 – шкала; |
||||||||||
|
|
|
|
|
|
|
|
|
|
94 |
|
5 – шка а отчёта амплитуды колебаний маятника; 6 – вертикальный стержень; |
|||||||||||
|
л |
|
|
7 – верхний кронштейн; 8 – математический маятник; |
|||||||
|
|
|
9 – фотоэлектрический датчик; 10 – электронный блок |
||||||||

Коэффициент |
трения качения с помощью наклонного маятника |
определяют путем |
ка |
измерения уменьшения амплитуды его колебаний за |
определенное число полных колебаний. Формулу для расчета коэффициента трения качения можно получить, если приравнять потерю энергии за период колебаний маятника работе сил трения за этот период. За n - число полных колебаний маятника шар переходит из положения В в положение B′ . При этом
маятник теряет энергию DE = mgDh , |
равную работе сил сопротивл ния DA на |
||||||||||||||||||||||||||||
пройденном пути S : |
|
|
|
|
|
DE = DA = DAmp + DAc |
|
|
|
|
|
|
|
|
е |
(13) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где DAmp - |
работа силы трения; |
|
DAс |
- |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
работа по преод лению с противления |
||||||||||||||||||||||||||||
среды и трения в подвесе маятника; |
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|||||||||||||||
h - изменение пол жения центра тяжести |
|||||||||||||||||||||||||||||
маятника. Пренебрегая Ac , ввиду ее малости имеем |
|
л |
и |
о |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
mgDh = Fmp S . |
|
|
|
|
|
(14) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
Из геометрических соображений следует, что: |
|
|
|
|
(15) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Dh = DL ×sin β |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
где α0 , αп |
|
|
|
|
|
|
|
|
DL = L(cosα0 - cosαn ) , |
|
|
|
|
|
|
|
|
(16) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
- амплитудные значения угла отклонен я маятника от положения |
|||||||||||||||||||||||||||||
равновесия |
в начальный |
момент |
|
времени |
черезб |
n полных |
колебаний |
||||||||||||||||||||||
соответственно (см. рис. 7). Тогда: |
|
|
- cosαn )и×sin β |
|
|
|
|
|
|
|
(17) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Dh = L(cosα0 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
L |
|
|
h |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
н |
нβ |
|
ая |
|
|
β |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
Fтяж |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Рис. 7. Соотн шение углов и сил |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Сила трения качения: |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
р |
|
|
|
|
|
|
|
Fтр = |
μk × N |
, |
|
|
|
|
|
|
|
|
|
(18) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|||
где N = m× g ×cos β . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
т |
|
и N |
в выражение (14) |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Подставим h |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и получа м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Э |
л |
е |
|
|
|
|
μk |
= |
|
R × DL ×tgβ |
= |
R × L × (cosα0 - cosαn ) ×tgβ |
, |
|
|
|
(19) |
||||||||||||
|
|
|
|
|
|
S |
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
95 |
|
|
|
|
|
|
|
|
|
|
|
|
||
где S - путь, который проходит маятник за n полных колебаний. |
(20) |
|||||||||
|
|
S = 4×n× L ×αср |
|
|
|
|||||
|
|
αср = |
α0 +αn . |
|
|
|
(21) |
|||
Тогда: |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
μк = |
|
R ×tgβ ×(α0 - αn ) |
|
|
|
|
|
(22) |
|
|
|
|
4 × n |
|
|
|
|
|||
|
|
|
|
|
|
|
|
ка |
||
где R - радиус шара; n- число полных колебаний; |
|
|
|
|||||||
α0 ,αn - углы о клонения |
||||||||||
маятника, выраженные в радианах, в начальный и конечный момен еы времени |
||||||||||
наблюдения. |
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
и |
о |
|
||
|
|
|
|
|
|
|
л |
|
||
|
|
|
|
|
|
|
|
|
||
1. Установить в гнездо шкалы исследуемый о разец. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
2. Произвести регулировку положения основания при помощи регулировочных |
||||||||||
опор таким образом, чтобы нить подвеса маятн ка совпала с нулевым делением |
||||||||
шкалы. |
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
||
3. |
Отрегулировать |
длину маятника |
с помощью устройства |
на |
верхнем |
|||
кронштейне таким образом, что ы при |
и |
колебании маятника шарик |
||||||
|
||||||||
перемещался по рабочей поверхности образца, не касаясь шкалы. |
|
|
||||||
|
|
|
|
0 |
|
|
|
|
4. |
|
|
|
б |
|
|
|
|
Установить угол наклона образца β = 45 . |
|
|
|
|
||||
5. |
Отклонить маятник от положения равновесия на угол α0 =60 |
и посчитать |
||||||
6. |
Вычислить коэффициент трения по формуле (22). |
= 300 и β = |
||||||
7. Аналогичные измерения провести для углов наклона образца β |
||||||||
600. |
|
ая |
|
|
|
|
|
|
8. |
Сопоставить получе ыен |
результаты и вычислить относительную |
||||||
погрешность измере |
ия для каждого |
угла наклона; за истинное |
значение |
|||||
коэффициент трения принятьн полученный результат при угле наклона β =450. 9. Измерения по п. 4-7 пр извести для всех образцов, входящих в комплект
установки. Выяснить как зависит коэффициент трения от вида материала и от |
|||
|
|
|
о |
степени чис о ы об аботки поверхности, от угла наклона маятника. |
|||
10. Резуль а ы измерений занести в таблицу 2 и сделать вывод. |
|||
е к |
т |
р |
|
|
|
||
Э |
л |
96 |
|
Таблица 2 – Результаты измерений |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
450 |
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ка |
|
|
β |
|
№ |
|
n |
|
μ |
i |
|
μср |
|
|
μ |
|
|
|
ε, % |
|
|
|
град |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
300 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
600 |
|
|
|
|
|
|
|
|
|
|
|
и |
о |
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контрольные вопросы: |
|
|
|
|
|
и |
б |
л |
|
|
|
|
|
|
|
||||
1. Какое |
фундаментальное |
|
|
|
|
определяет |
|
силу трения? |
|||||||||||
взаимодейств е |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
Сформулируйте определение силы трен я, перечислите возможные виды |
||||||||||||||||||
|
трения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
Чему равна сила трения покоя? Как находится максимальная сила трения |
|
|
покоя? |
|
3. |
Куда направлена сила трения и чему она равна? От чего зависит |
|
|
коэффициент трения скольжения? |
|
4. |
Какое трение называется внешним, |
какое внутренним? |
5. |
Чему равно трение качения? Н пишите закон Кулона для определения силы |
|
|
трения качения. От чего зависитая |
коэффициент трения качения, какова |
8.Способы увеличенияр ои нуменьшения силы трения.
9.Докажите, что сила трения не зависит от площади поверхности соприкасающихсят тел. нк
Э |
л |
е |
|
||
|
97 |

ЛАБОРАТОРНАЯ РАБОТА № 13
ИССЛЕДОВАНИЕ СОБСТВЕННЫХ КОЛЕБАНИЙ СТРУНЫ МЕТОДОМ РЕЗОНАНСА
Цель работы: Наблюдение стоячих волн, возникающих |
при кол баниях |
||||
струны, и изучение их свойств. |
|
о |
т |
ка |
|
|
|
||||
|
|
|
|
, три |
|
Приборы и принадлежности: генератор внешних колебаний, струнае |
|||||
груза, весы, линейка. |
и |
|
|
|
|
ТЕОРЕТИЧЕСКОЕ ВВЕДЕНИЕ |
|
|
|
|
|
|
|
|
|
|
|
Особым случаем интерференции являются стоячие волны – волны
образующиеся |
при |
наложении |
двух |
егущих |
плоских |
волн, |
|
распространяющихся навстречу друг другу с одинаковымил |
частотами и |
||||||
амплитудами, а в случае поперечных волн с од наковой поляризацией. |
|
||||||
Пусть две плоские |
|
б |
|
|
|
|
|
волны распространяются бнавстречу друг другу вдоль |
|||||||
оси х в среде без затухания, причём о е волны характеризуются одинаковыми |
|||||||||
амплитудами и частотами. |
|
и |
|||||||
|
|
|
|
|
|
о |
н |
н |
ая |
|
|
|
|
|
|
|
|||
|
|
|
|
т |
р |
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
Рис. 1 Импульсы бегущей и отражённой волны |
|||||||
Начало |
|
к |
|
|
|
|
|
|
|
оординат выберем в точке, в которой обе волны имеют одинаковую |
|||||||||
|
|
е |
|
|
|
|
|
|
|
начальную фазу, а отсчёт времени начнём с момента, когда начальные фазы |
|||||||||
обеих волн равны нулю. Тогда их уравнения будут иметь вид: |
|||||||||
Э |
л |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
98 |
|

ξ1=Аcos(ωt-κx) |
(1) |
ξ2=Аcos(ωt+κx). |
(2) |
Сложив уравнения (1) и (2) и учитывая, что значение волнового числа κ=2π/λ, |
||||||||||
получим уравнение стоячей волны: |
|
|
|
|
|
|
т |
е |
ка(3) |
|
|
|
|
|
|
|
|
||||
ξ=ξ1+ξ2=2Аcosκx•cosωt=2Аcos(2πx/λ)•cosωt. |
|
|||||||||
|
|
|
|
|
|
|
о |
|
|
|
Из уравнения (3) следует, что в каждой точке стоячей волны происходят |
||||||||||
колебания одной и той же частоты ω, с амплитудой |
|
и |
Аст=|2Аcos(2πx/λ)|, |
|||||||
зависящей от координаты рассматриваемой точки. |
|
л |
|
|
|
|
||||
|
|
|
|
|
|
|||||
|
|
|
и |
б |
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
||
|
ая |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Рис. 2 Внешний вид стоячей волны. В точке 1 узел. В точке 2 пучность |
||||||||||
н |
|
|
|
|
|
|
|
|
|
|
В точках среды, где 2πx/λ=±nπ, ( n=0,1,2,3,….) амплитуда колебаний достигает максимального значения, рав ого 2А. В точках среды, где 2πx/λ=±(n+1/2)π, ( n
|
о |
=0,1,2,3,….), амплитуда колебаний обращается в нуль. Точки, в которых |
|
р |
|
амплитуда максимальна (Анст=2А), называются пучностями стоячей волны, а точки, |
|
в которых амплитуда колебаний равна нулю, называются узлами стоячей волны. |
||||||
|
|
|
т |
|
|
|
|
Координа ы пучностей находятся: |
|
|
|||
|
|
е |
|
хпуч=±nλ/2 |
(n=0.1,2,….). |
(4) |
|
Координаты узлов находятся: |
|
|
|||
|
л |
к |
|
хуз=±(n+1/2)λ/2 (n=0.1.2,……). |
(5) |
|
|
|
|
||||
Э |
Из уравнений (4) и (5) следует, что расстояния между двумя соседними |
|||||
|
|
|
99 |
равны λ/2. |
||
пучностями и двумя |
соседними |
узлами одинаковы и |
||||
Расстояние между соседними пучностью и узлом стоячей волны равно λ/4.
Все точки стоячей волны между двумя узлами колеблются с разными амплитудами, но с одинаковыми фазами. При переходе через узел множитель 2А cos (2πх/λ) меняет свой знак, поэтому фаза колебаний по разные стороны от узла отличается на π, т.е. точки, лежащие по разные стороны от узла,
колеблются в противофазе. |
|
|
|
|
|
ка |
|
В случае стоячей волны |
переноса энергии нет, |
так |
|
|
и |
||
как падающая |
|||||||
отраженная волны одинаковой амплитуды и несут одинаковую |
е |
|
|
||||
энергию в |
|||||||
|
|
|
|
т |
|
|
|
противоположных направлениях. Поэтому полная энергия результирующей |
|||||||
волны, заключённой между узловыми точками, остаётся постояннойо |
. Лишь в |
||||||
пределах расстояний, равных половине длины во ны, |
и |
|
|
|
|
||
происходят взаимные |
|||||||
|
|
б |
|
|
|
|
|
превращения кинетической энергии в потенциальную и обратно. |
|
|
|
||||
Гибкая однородная нить |
и |
|
|
двумя |
точками |
и |
|
(струна), натянутая междул |
|||||||
выведенная из положения равновесия, может совершать колебания различного вида. В струне могут установиться стоячие волны (на концах струны мы всегда
имеем узел смещения), при этом на длине струны будет укладываться всегда |
|
ая |
между двумя соседними |
целое число стоячих волн, а так как расстояниеб |
|
точками струны, колеблющимися с одинаковой амплитудой, равно половине длины бегущей волны, то можно н пис ть:
|
|
|
|
|
н |
(λ/2)•n =ℓ |
||
|
|
|
|
|
|
|
|
|
где n - целое число (l, 2, 3 и т. д.), ℓ- длина струны. Так как длина волны связана |
||||||||
со скоростью распр странениян |
импульса деформации вдоль струны (с) и |
|||||||
частотой колебаний ст уны (ν) соотношением: |
||||||||
|
|
т |
р |
о |
|
|
|
|
|
|
|
|
λ = |
c |
|
||
|
|
|
|
|
v |
|||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Струна, сл довательно, |
может колебаться не с одной частотой, а с целым |
|||||||
е |
к |
|
|
|
|
|
|
|
|
|
|
|
соответствует тому факту, что струна может |
||||
спектром частот, что |
||||||||
рассматриваться как система, состоящая из бесконечного числа материальных |
|
точекл. |
|
Э |
100 |