

6.3 Определение передаточных функций корректирующих устройств
После выбора и определения параметров желаемой передаточной функции разомкнутой системы находят передаточные функции корректирующих устройств, предварительно определив передаточную функцию функционально необходимых устройств проектируемой системы. К таким устройствам относятся, например, фазовый детектор и перестраиваемый генератор в системе ФАПЧ, гетеродин и частотный дискриминатор в системе АПЧ, угловой дискриминатор и антенна с исполнительным устройством и усилителем мощности в системе автоматического сопровождения цели РЛС.
Передаточную функцию разомкнутой системы без корректирующих устройств, составленную из передаточных функций функционально необходимых устройств системы, будем называть исходной передаточной функцией.
Включение в систему РА корректирующих устройств означает введение в алгоритм управления, формируемого регулятором системы, дополнительных сигналов, пропорциональных сигналу ошибки, производным и интегралам от него, а также сигналов, пропорциональных производным от выходного сигнала. С физической точки зрения введение дополнительных сигналов приводит к компенсации влияния на качество работы системы РА наиболее инерционных устройств системы, в результате чего и достигаются заданные показатели качества работы системы.
Различают три способа включения корректирующих устройств: последовательный (рис. 7.2, а); параллельный (рис. 7.2,б) и по схеме с обратной связью (рис. 7.2, в). Выбор того или иного способа включения корректирующего устройства зависит от удобства технической реализации и требований к стабильности характеристик системы РА.
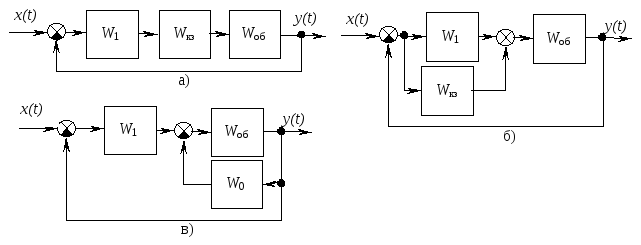
Рис. 6.2 Способы включения корректирующих устройств
Синтез систем РА основан на определении передаточной функции корректирующего устройства, включенного последовательно в цепь сигнала ошибки системы. Передаточная функция этого устройства должна быть выбрана такой, чтобы выполнялось условие
![]() ,
(7.0)
,
(7.0)
где Wри(p) – передаточная функция исходной части разомкнутой системы; Wкз(p) – передаточная функция последовательного корректирующего звена. Из выражения (7. 21) найдем
![]() .
(7.0)
.
(7.0)
Следовательно, чем больше звеньев исходной передаточной функции включено в желаемую передаточную функцию системы, тем проще передаточная функция корректирующего звена. Число звеньев исходной функции, которые можно ввести в желаемую передаточную функцию, определяется заданным запасом устойчивости по фазе.
Если в системе РА применяется корректирующее устройство, включенное в цепь обратной связи, то его передаточная функция имеет вид
![]() ,
(7.0)
,
(7.0)
откуда
![]() ,
(7.0)
,
(7.0)
где Wo(p) – передаточная функция корректирующего устройства в цепи обратной связи; Woб(p) – передаточная функция объекта управления (устройств, охваченных обратной связью).
Если используют корректирующее устройство, включенное параллельно с каким-либо элементом системы, то его передаточная функция с учетом рис. 7.2 определяется как
![]() .
(7.0)
.
(7.0)
Тогда
![]() ,
(7.0)
,
(7.0)
где Wп(p) – передаточная функция параллельного корректирующего устройства; W1(p) – передаточная функция цепи сигнала ошибки.
В современных системах РА применяются все три способа включения корректирующих устройств. Это объясняется тем, что в ряде случаев передаточная функция одного устройства получается настолько сложной, что ее трудно реализовать технически. Кроме того, для улучшения стабильности работы систем РА относительно изменений условий окружающей среды и колебаний напряжений источников питания, целесообразно наиболее инерционные и нестабильные устройства системы охватить обратной связью. При этом передаточная функция последовательного корректирующего устройства, вычисленная по формуле (7.22), имеет вид
![]() .
(7.0)
.
(7.0)
Один из сомножителей этого выражения, например, первый, реализуется с помощью последовательного корректирующего устройства, а второй – эквивалентного корректирующего устройства в цепи обратной связи, передаточная функция которого определяется по формуле (7.24).
При синтезе систем РА часто оказывается, что передаточные функции корректирующих устройств не удовлетворяют условию физической реализуемости. Очевидно, что в таких случаях желаемая передаточная функция из-за упрощения передаточных функций корректирующих устройств может быть реализована лишь приближенно. При этом необходимо обеспечить совпадение ЛЧХ разомкнутой системы в области низких и средних частот с желаемыми ЛЧХ, расхождение характеристик допустимо только в области высоких частот. После упрощения передаточных функций корректирующих устройств необходимо построить ЛЧХ спроектированной системы РА и проверить выполнение заданных показателей качества работы.
Обычно в системах РА применяют корректирующие устройства на постоянном токе. Корректирующие устройства на переменном токе используют редко, так как они сложны и для их нормальной работы требуются источники энергии с высокой стабильностью частоты, что в ряде случаев, особенно в системах РА летательных аппаратов, невыполнимо. Ниже рассматриваются корректирующие устройства постоянного тока.
На рис. 7.3, а, б показаны схема и ЛЧХ звена с отставанием по фазе, которое используется в системах РА как последовательное корректирующее устройство. Его передаточная функция имеет вид
![]() ,
(7.0)
,
(7.0)
где Т=R2С
– постоянная
времени звена;
![]() – постоянный коэффициент.
– постоянный коэффициент.

Рис. 7.3 Схема (а) и ЛЧХ (б) корректирующего звена
с отставанием по фазе
На рис. 7.4, а, б представлены схема и ЛЧХ последовательного корректирующего звена с опережением по фазе, передаточная функция которого
![]() ,
(7.0)
,
(7.0)
где Т=R1С;
![]() – постоянный коэффициент.
– постоянный коэффициент.

Рис. 7.4 Схема (а) и ЛЧХ (б) корректирующего звена
с опережением по фазе
В системах РА применяют также последовательное комбинированное звено, схема которого и ЛЧХ изображены на рис. 7.5, а, б. Передаточная функция звена имеет вид
 .
(7.0)
.
(7.0)
Сопротивления и емкости выбираются такими, чтобы выполнялось условие Т1>Т2>Т3>Т4. С этой целью необходимо, чтобы C2>C1 и R1>R2. Тогда сопротивления и емкости звена рассчитывают по известным постоянным времени
![]() ;
;
![]() ;
;![]() ;
;
![]() .
(7.0)
.
(7.0)
В качестве корректирующих обратных связей используют жесткие и гибкие связи.

Рис. 7.5 Схема (а) и ЛЧХ (б) комбинированного корректирующего
звена