

5.2. Система автоматической подстройки частоты
Системы автоматической подстройки частоты применяются для стабилизации частоты генерируемых колебаний, слежения за частотой сигнала в радиоприемных устройствах, в демодуляторах частотно-модулированных колебаний с обратной связью по частоте и др.
Функциональная схема АПЧ супергетеродинного приемника (рис. 42) содержит в своем составе смеситель (СМ), усилитель промежуточной частоты (УПЧ), частотный дискриминатор (ЧД), фильтр низкой частоты (ФНЧ) и управитель гетеродина (УГ). Входной сигнал Uс(t) с частотой c преобразуется в смесителе в напряжение промежуточной частоты пр, затем усиливается усилителем промежуточной частоты и подается на частотный дискриминатор. Если промежуточная частота пр отличается на от ее номинального значения пр0, то на выходе ЧД возникает напряжение, значение и знак которого зависят от значения и знака отклонения промежуточной частоты . Напряжение с ЧД Uчд через ФНЧ подается на гетеродин (Г), частота которого перестраивается, обеспечивая минимальное рассогласование значения пр от номинальной частоты пр0.

Рис. 42. Функциональная схема системы автоматической
подстройки частоты
Отклонение промежуточной частоты сигнала пр от номинального значения
= пр – пр0 = c – г,
где пр = c – г, c = c0 + c – частота входного сигнала; г = =г0 + г – частота гетеродина; c, г – отклонение частот входного сигнала и гетеродина от номинальных значений c0, г0.
Напряжение на выходе ЧД является функцией отклонения промежуточной частоты от номинального значения
uчд = F().
Зависимость F() называют дискриминационной характеристикой (рис. 43). При малых значениях дискриминационная характеристика линейна, и выражение принимает вид
uчд = kчд,
где kчд – коэффициент передачи ЧД (крутизна дискриминационной характеристики).
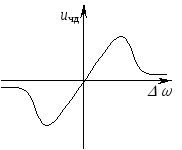
Рис. 43. Дискриминационная характеристика частотного
детектора
Под действием напряжения, снимаемого с фильтра Uф=KфUчд, Kф – коэффициент передачи ФНЧ, частота гетеродина перестаивается на
г = Kг uф,
где Kг – коэффициент передачи управителя гетеродина (УГ).
Из выражений (2.6), (2.8) и (2.9) следует, что ошибка регулирования промежуточной частоты в системе АПЧ может быть определена по выражению
![]() ,
,
где K = Kчд Kф Kг – коэффициент передачи системы АПЧ.
Уравнениям соответствует структурная схема, представленная на рис.44.

Рис. 44. Структурная схема системы АПЧ
Структурная схема системы АПЧ учитывает дестабилизирующие факторы, влияющие на точность ее работы: n(t) – флуктуационная составляющая напряжения, поступающая с дискриминатора; г – нестабильность гетеродина.
5.3. Система фазовой автоподстройки частоты
Системы фазовой автоподстройки частоты применяются в радиоприемных устройствах, перестраиваемых по частоте генераторов высокостабильных колебаний и других устройств. Функциональная схема системы ФАПЧ (рис. 45) предназначена для стабилизации частоты подстраиваемого генератора (ПГ) по сигналу высокостабильного эталонного генератора (ЭГ).

Рис.45. Функциональная схема системы ФАПЧ
Объектом управления в системе ФАПЧ является ПГ, частота колебаний (или фаза) напряжения которого изменяется в зависимости от напряжения, вырабатываемого управляющим элементом (УЭ), при этом напряжение ПГ остается неизменным. Частота напряжения ПГ является выходным сигналом системы ФАПЧ, на которую действует напряжение от эталонного генератора с частотой э. Этот сигнал является управляющим воздействием. Измерителем рассогласования является фазовый детектор (ФД), выходной сигнал которого является нелинейной периодической функцией разности фаз сигналов, подаваемых от ЭГ и ПГ. Сигнал с ФД через ФНЧ подается на УЭ, который перестраивает частоту ПГ, приближая ее к частоте ЭГ. В установившемся режиме в системе устанавливается постоянная разность фаз между напряжениями uэ и uг, при этом напряжение на выходе ФД также будет постоянным, в результате чего частота сигнала с ПГ окажется равной частоте сигнала ЭГ.
Начальное рассогласование от ЭГ и ПГ определяется как
н = э – гн,
где гн – начальная частота сигнала ПГ.
После включения системы ФАПЧ частота сигнала ПГ будет описываться выражением:
г = гн – гу.
Частотная составляющая гу возникает из-за перестройки частоты ПГ и определяется выражением
гу = kг kуэ uфд = kг kуэ kд F(),
где kг – коэффициент передачи ПГ по частоте;
kуэ – коэффициент передачи УЭ;
kд – коэффициент передачи ФД, равным максимальному напряжению на выходе ФД;
– разность фаз напряжений ЭГ и ПГ;
F() – дискриминационная характеристика.
Важным параметром систем ФАПЧ является величина полосы захвата. Под полосой захвата понимается диапазон первоначальных расстроек между частотами сигнала и подстраиваемого генератора, в пределах которого обеспечивается переход к режиму слежения за частотой. Для оценки максимально допустимого рассогласования используется полоса удержания.
Отличие структурной
схемы системы ФАПЧ, приведенной на (рис.
46), от системы АПЧ (рис. 44) состоит в
наличии в системе ФАПЧ интегрирующего
звена
![]() ,
с передаточной функциейW=1/p,
производящего математическую операцию
интегрирования
,
с передаточной функциейW=1/p,
производящего математическую операцию
интегрирования

Рис. 46. Структурная схема системы ФАПЧ
Интегрирующее звено и возмущающее воздействие n(t) учитывают влияние на качество работы системы флуктуационной составляющей напряжения, а воздействие г – влияние нестабильности частоты ПГ.