

1.5 Построение планов ускорений
Построение планов ускорений рассмотрим для второго положения механизма. Так как кривошип ОА вращается с постоянной угловой скоростью, то точка А будет иметь только нормальное ускорение, величина которого равна:
![]()
а направленно оно параллельно звену ОА от точки А к точке О.
Определяем масштабный коэффициент плана ускорений:
![]()
Последовательность построения плана ускорений рассмотрим для седьмого положения механизма.
Из произвольной
точки π – полюса плана ускорений
откладываем вектор
![]() параллельно
звену ОА от точки А к точке О.
параллельно
звену ОА от точки А к точке О.
Для построения точки В и В' составим и решим графические уравнения:
Ускорение
![]() направлено
параллельно ОВ проведенное через полюс
направлено
параллельно ОВ проведенное через полюс![]() .
.
Ускорение
![]() направлено
параллельно ОВ' проведенное через полюс
направлено
параллельно ОВ' проведенное через полюс![]() .
.
Определим модули нормальных ускорений:
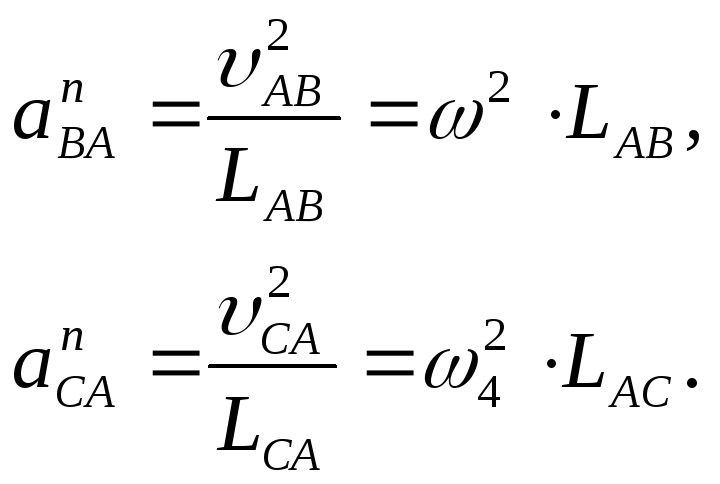
Нормальное ускорение
![]() направлено параллельно звену АВ от
точки В к точке А (центру вращения).
направлено параллельно звену АВ от
точки В к точке А (центру вращения).
Нормальное
ускорение
![]() направлено параллельно звену АС от
точки С к точке А.
направлено параллельно звену АС от
точки С к точке А.
Для 0 положения
![]()
Для 2 положения
![]()
Для 10 положения
![]()
Тангенциальные
составляющие ускорений
![]() и
и![]() по абсолютной величине неизвестны, но
известны по направлению. Они направлены
перпендикулярно соответствующим звеньям
механизма АВ и АС или перпендикулярно
нормальным составляющим.
по абсолютной величине неизвестны, но
известны по направлению. Они направлены
перпендикулярно соответствующим звеньям
механизма АВ и АС или перпендикулярно
нормальным составляющим.
Согласно первому
векторному уравнению через точку а
плана ускорений проводим прямую,
направленную вдоль звена АВ в направлении
от точки В к точке А и на ней откладываем
отрезок a![]() =8 мм, величина которого в масштабе
соответствует величине вектора нормальной
составляющей ускорения
=8 мм, величина которого в масштабе
соответствует величине вектора нормальной
составляющей ускорения
![]() .
.
Через точку
![]() перпендикулярно звену АВ (или тоже
самое, что перпендикулярно
перпендикулярно звену АВ (или тоже
самое, что перпендикулярно![]() )
проводим направление вектора
тангенциального ускорения
)
проводим направление вектора
тангенциального ускорения![]() ,
до пересечения с линей действия вектора
,
до пересечения с линей действия вектора![]() (параллельно к ОВ, проведенный через
полюс
(параллельно к ОВ, проведенный через
полюс![]() ). Получим точку В.
). Получим точку В.
Согласно второму
векторному уравнению через точку а
плана ускорений проводим прямую,
направленную вдоль звена АC
в направлении от точки C
к точке А и на ней откладываем отрезок
![]() =3
мм. величина которого в масштабе
соответствует величине вектора нормальной
составляющей ускорения
=3
мм. величина которого в масштабе
соответствует величине вектора нормальной
составляющей ускорения![]() .
.
Через точку
![]() перпендикулярно
звену АC
проводим направление вектора
тангенциального ускорения
перпендикулярно
звену АC
проводим направление вектора
тангенциального ускорения
![]() ,
до пересечения с линей действия вектора
,
до пересечения с линей действия вектора![]() (параллельно к ОC,
проведенный через полюс
(параллельно к ОC,
проведенный через полюс ![]() ).
Получим точку C.
).
Получим точку C.
Для определения ускорений точек S2 и S4 – центров тяжести звена 2 и звена 4 воспользуемся теоремой подобия.
![]()
Определяем действительное значение ускорений:
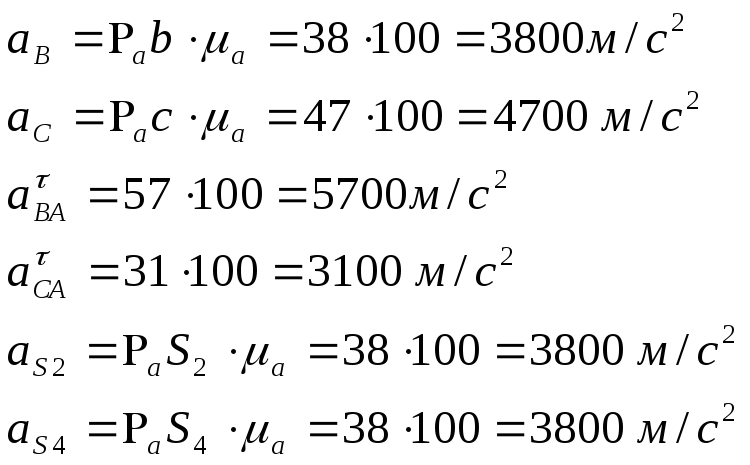
План ускорений для положений механизма 1 и 6 строим аналогично. Ускорение всех точек звеньев механизма и их отрезки сводим в таблицу 4.
Таблицу 4. Абсолютные и относительные ускорение точек
звеньев механизма и их отрезки в миллиметрах
|
Обозначение |
Единица |
Положение механизма | ||||
|
0 |
2 |
10 | ||||
|
|
мм |
65 |
65 |
65 | ||
|
аА |
м/с2 |
6552 |
6552 |
6552 | ||
|
|
мм |
44 |
45 |
38 | ||
|
аB |
м/с2 |
4400 |
4500 |
3800 | ||
|
|
мм |
16 |
65 |
47 | ||
|
АC |
м/с2 |
1600 |
6500 |
4700 | ||
|
|
мм |
0 |
57 |
57 | ||
|
|
м/с2 |
0 |
570 |
5700 | ||
|
|
мм |
67 |
31 |
31 | ||
|
|
м/с2 |
6700 |
3100 |
3100 | ||
Угловые ускорения звеньев определяются на основе построенных планов ускорений.
Входное звено 1 вращается равномерно с постоянной угловой скоростью. Следовательно, его угловое ускорение равно нулю:
![]()
Модули угловых ускорений второго и четвертого звеньев для второго положения механизма можно найти по формулам:
Таблица 5. Значение угловых ускорений шатуна АВ и АВ' в с-2
|
Обозначение |
Единица |
Положение механизма | ||
|
0 |
2 |
10 | ||
|
ε2 |
с-2 |
0 |
10363 |
10363 |
|
ε4 |
с-2 |
12181 |
5656 |
5656 |
Определим направления
угловых ускорений звеньев 2 и 4. Чтобы
определить направление углового
ускорения ε2
необходимо вектор относительного
тангенциального ускорения
![]() с плана ускорений перенести в точку В
механизма, а точку А условно закрепить.
с плана ускорений перенести в точку В
механизма, а точку А условно закрепить.