|
|
|
|
1 |
1 (xвх ) |
|
|
|
xвых |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
II |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xвх |
|
(x ) |
|
|
x |
|
|
c |
I |
|
|
|
|
|
|
|
2 |
2 вх |
|
|
|
вых |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n (xвх ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xвх |
|
|
|
|
|
|
0 |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
б |
|
|
Рис. 6.8. Параллельное соединение звеньев:
а – структурная схема; б – способ построения статической характеристики
6.2.2.2 Статическая характеристика последовательного соединения звеньев
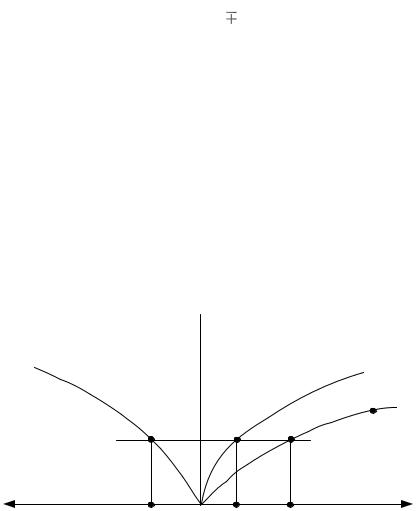
При последовательном соединении звеньев (рис. 6.9), согласно выражению (6.3), статическая характеристика соединения звеньев находится графическим построением, отраженном на рис. 6.10.
|
|
|
|
|
|
xвых1 = xвх2 |
|
|
|
|
xвых2 = xвх3 |
|
|
|
|
|
xвых3 = xвых |
xвх = xвх1 |
(x |
) |
|
|
|
(x |
) |
|
|
(x |
) |
|
|
|
1 вх1 |
|
|
|
|
|
2 |
вх2 |
|
|
|
|
3 |
|
вх3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.9. Последовательное соединение звеньев |
|
|
|
|
|
xвых φ3 xвых2 φ2[хвых1 φ1(xвх )] = φ(xвх ). |
(6.3) |
|
|
|
|
|
|
xвх2 xвых1 |
|
|
|
|
|
|
|
|
|
2 |
(xвх2 ) |
|
|
|
1(xвх ) |
|
|
|
|
|
|
|
|
|
|
|
|
II |
|
|
|
I |
|
|
|
|
|
|
|
|
|
xвых2 xвх3 |
|
|
|
xвх1 xвх |
|
|
|
|
|
|
|
|
|
III |
|
|
IV |
|
|
|
|
|
|
|
|
|
3 (xвх3 ) |
|
|
|
(xвх ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xвых3 xвых
Рис. 6.10. Графический метод построения статической характеристики последовательного соединения звеньев

В первом квадранте строится характеристика первого звена, во втором – второго звена, в третьем – третьего звена. Так как xвх1 является одновременно xвх всего соединения звеньев, а xвых3 = xвых, то в 4-м квадранте можно построить статическую характеристику всей системы последовательного соединения трех звеньев. Для этого последовательно задаются величиной xвх1 и переносом ее против часовой стрелки находят соответствующие значения xвых3. Если число звеньев в соединении больше трех, то их разбивают в группы по три. Если число звеньев в соединении меньше трех, то недостающее звено заменяют звеном с единичным передаточным коэффициентом. Статическая характеристика такого звена изображается биссектрисой квадрантного угла.
Для последовательного соединения линейных звеньев коэффициент передачи соединения равен произведению коэффициентов передачи звеньев, образующих это соединение:
n |
|
xвых Kxвх , где K ki . |
(6.4) |
i 1
6.2.2.3 Статическая характеристика звена с обратной связью (встречнопараллельного соединения звеньев)
В системах с обратной связью (рис. 6.11) статическая характеристика также может быть построена графическим методом. Пусть статическая характеристика звена без обратной связи определяется уравнением xвых = σ(ε), а статическая характеристика звена обратной связи имеет вид:
|
|
xос (xвых ) . |
(6.5) |
xвх |
|
|
|
xвых |
( ) |
|
|
|
|
|
|
|
|
 ±
±
xос
(xвых )
Рис. 6.11. Встречно-параллельное соединение звеньев
Удобнее вести расчет, используя обратную статическую характеристику системы:
ε= ψ(xвых).
ε= [xвх ± xос].
xвх (xвых ) |
(xвых ). |
(6.6) |
Из выражения (6.6) вытекает способ графического построения статической характеристики системы. Для случая отрицательной обратной связи построение ведется в двух квадрантах (рис. 6.12). В первом квадранте строим статическую характеристику звена без обратной связи σ(ε) – I, а во втором – характеристику звена обратной
связи φ(xвых) – II.
Зададимся некоторым значением xвых(т.А) и определим ε = ψ(xвых). (отрезок оа), при этом xос = φ(xвых) равен отрезку ob.
Так как при отрицательной обратной связи xвх = ε + xос, то перенесем отрезок bо вправо так, чтобы его конец b совпал с точкой a. Найденная точка 3 и будет точкой искомой характеристики. Остальные точки находятся аналогично.
xвых 
II
(x вых
xос (xвых )
I – статическая характеристика основного звена, II – статическая характеристика звена обратной связи, III – результирующая характеристика эквивалентного звена
Рис. 6.12. Графический метод построения статической характеристики звена, охваченного отрицательной обратной связью:
Для случая линейных статических характеристик звена с обратной связью:
уравнение статики основного звена xвых = k0 ε;
уравнение статики звена обратной связи xос = kос xвых;
уравнение статики звена с обратной связью (встречнопараллельного соединения звеньев):
xвых k0 |
(xвх koc xвых ) |
|
k0 |
xвх . |
(6.7) |
|
k0koc |
|
1 |
|
|
Для звена, охваченного отрицательной обратной связью:
xвых kxвх ; k |
|
k0 |
. |
|
k0koc |
1 |
|
6.3 Статическая характеристика линейной замкнутой системы управления (системы стабилизации)
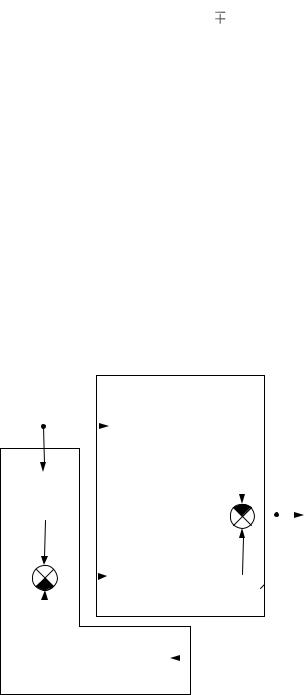
Рассмотрим линейную систему комбинированного управления (рис. 6.13). На объект действует возмущающее воздействие ν (нагрузка) и управляющее воздействие μ. Регулятор представлен в виде двух частей: kRO, реагирующий на отклонение φ и kRf, реагирующий на возмущение ν.
Статические характеристики объекта и регулятора представлены соответствующими коэффициентами передачи: kfоб, kuоб, kRO, kRf.
Ставится задача нахождения статической характеристики (характеристики регулирования) САУ, изображенной на рис. 6.13.
|
|
|
|
|
|
|
|
|
|
объект |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
об |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kRf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k u |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
об |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kRO |
|
|
|
|
|
|
|
регулятор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.13. Структурная схема линейной комбинированной САУ |
|
|
Уравнение статики объекта: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ ku |
μ k f . |
(6.8) |
|
|
|
|
|
|
|
|
|
об |
|
|
об |
|
Уравнение статики регулятора по отклонению:
Уравнение статики регулятора по нагрузке:
164
Уравнение комбинированного регулятора:
|
μ μ1 |
μ2 |
; |
(6.11) |
|
μ kRОφ kRf . |
|
|
Знак минус при воздействии по отклонению указывает на отрицательную обратную связь по отклонению: c возрастанием φ открытие μ должно уменьшаться. Знак плюс при воздействии по нагрузке указывает на положительную обратную связь по нагрузке: c возрастанием нагрузки ν открытие μ должно увеличиваться.
Решая совместно (6.8), (6.9), (6.10) и (6.11), получим уравнение статики САУ:
|
(ku k |
|
k f |
) |
|
|
φ |
об |
Rf |
|
|
об |
|
. |
(6.12) |
1 ku |
k |
RO |
|
|
|
|
|
|
|
об |
|
|
|
|
|
KСАУ |
|
|
(6.13) |
т. е. коэффициент передачи замкнутой линейной комбинированной САУ определяется выражением
|
|
|
|
|
ku |
k |
|
|
|
k f |
|
K |
|
|
|
об |
|
Rf |
|
|
|
|
|
об |
. |
(6.14) |
CAУ |
|
1 ku |
|
k |
|
|
|
|
|
|
|
|
RO |
|
|
|
|
|
|
|
|
|
об |
|
|
Если компенсирующая цепь отсутствует (kRf = 0), то для САУ по |
отклонению уравнение статики принимает вид: |
|
φ |
|
|
k f |
|
|
|
|
|
. |
|
|
|
|
об |
|
|
|
|
|
(6.15) |
1 ku |
k |
|
|
|
|
|
|
|
|
|
об |
|
|
RO |
|
При ν = 1 (номинальная нагрузка ) φ изменяется на: |
|
φном |
|
|
k f |
|
|
|
|
|
|
1. |
|
|
|
|
об |
|
|
|
|
|
|
1 ku |
|
k |
|
|
|
|
|
|
|
|
|
|
|
об |
|
|
RO |
|
Таким образом, для статического объекта и статического регулятора коэффициент передачи замкнутой системы по отклонению равен статизму регулирования.
Статизм регулирования – это относительная статическая ошибка при изменении нагрузки от холостого хода до номинальной.
Статическая ошибка системы равна статизму при номинальной нагрузке, в общем случае статическая ошибка пропорциональна статизму и относительной нагрузке φст = δ ν.
Объект может быть:
статический (kоб – конечное число);
астатический (kоб = ∞).
Регулятор может быть:
статический (kRО – конечное число);
астатический (kRО = ∞).
Когда объект – статический, регулятор – астатический (kRО = ∞), то:
δ = 0, т. е. статизм САУ по отклонению равен нулю, а значит и статическая ошибка равна нулю.
Если объект – астатический (kоб = ∞), регулятор – статический, тогда, раскрыв неопределенность, получаем:
При регулировании по отклонению астатического объекта статизм системы равен статизму регулятора.
Для комбинированного регулятора.
При наличии регулятора по нагрузке возможен случай полной компенсации, если числитель выражения (6.12) равен нулю:
|
|
|
|
|
|
ku k |
|
k f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ |
об |
Rf |
|
об |
; ku |
k |
|
k f |
0. |
|
|
|
|
|
|
|
|
|
|
|
1 ku k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
об |
|
Rf |
об |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
об |
RО |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ku |
kобf |
k f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При k |
|
|
kобf |
статизм системы будет равен |
δ |
об kобu |
|
об |
0 . |
|
Rf |
ku |
1 ku |
k |
RО |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
об |
|
|
|
|
|
|
|
|
|
|
|
|
об |
|
|
Система с полной (идеальной) компенсацией ведет себя как астатическая система.
6.4 Погрешность систем автоматического управления при медленно изменяющихся воздействиях. Ряд ошибок
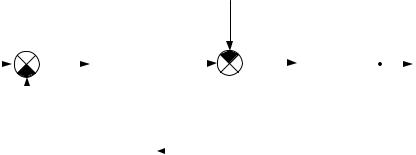
Система регулирования по отклонению (рис. 6.14) описывается уравнением:
D(p)ε(t) Q(p)g(t) N( p) f (t). |
(6.16) |
F (s)
|
G(s) |
|
E(s) |
|
|
|
|
R(s) |
U (s) |
|
X (s) |
|
|
WR (s) |
Wоб (s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X ос (s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wос (s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.14. Структурная схема САУ по отклонению |
Как следует из (6.16), установившаяся ошибка εуст |
имеет две со- |
ставляющие: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
εуст εg ε f ,
где εg – ошибка воспроизведения задающего воздействия; εf – ошибка, создаваемая возмущением (при нескольких возмущениях составляющая εf имеет несколько слагаемых). Каждая из составляющих εg и εf определяется отдельно.
Рассмотрим методику определения ошибки воспроизведения задающего воздействия.
Передаточная функция замкнутой системы относительно ошибки по задающему воздействию имеет вид:
где Wраз(s) – передаточная функция разомкнутой системы:
Wраз (s) WR (s)Wоб (s)Woc (s).
Изображение ошибки воспроизведения задающего воздействия запишется:
Eg |
(s) Wεg |
(s)G(s) |
|
1 |
|
G(s). |
|
|
|
|
Wраз |
|
|
|
1 |
(s) |
Разложим передаточную функцию замкнутой системы относительно ошибки по задающему воздействию Wεg(s) в ряд по возрастающим степеням s в окрестности точки s = 0, что соответствует большим значениям времени (t → ∞), т. е. установившемуся значению ошибки при заданном задающем воздействии

Wεg (s)
E |
|
(s) [C |
C |
|
s |
1 |
C |
|
|
s2 ... |
1 |
|
C |
|
sk ] |
|
|
|
0 |
G(s). |
(6.17) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
0g |
1g |
|
2! |
|
2 g |
|
|
k! |
kg |
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Оригинал ряда (6.17) принимает вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
ε(t) C |
g(t) C |
dg(t) |
|
|
1 |
|
C |
d 2 g(t) |
... |
1 |
|
C |
|
d k g(t) |
(6.18) |
|
|
|
|
|
|
|
|
|
|
dtk |
g |
|
0 g |
|
1g |
|
dt |
|
|
|
2! 2 g |
dt2 |
|
|
|
|
|
k! kg |
|
Коэффициенты ряда ошибок C0 g ;C1g ;C2 g ...определяют по форму-
лам разложения передаточной функции относительно ошибки по задающему воздействию Wεg(s) в ряд Тейлора:
|
|
[Wεg (s)]s 0 ; C1g |
[ |
dWεg (s) |
|
|
|
|
С0 g |
|
|
]s 0 ; |
|
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6.19) |
|
|
|
d 2W (s) |
|
|
|
|
d kW (s) |
|
|
|
|
|
|
|
|
|
C |
[ |
εg |
] |
; ... ; C [ |
|
εg |
] |
. |
|
2 |
|
|
k |
|
2 g |
|
ds |
s 0 |
|
|
kg |
|
ds |
s 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Коэффициенты ряда ошибок (6.18) могут быть выражены также через коэффициенты полиномов числителя и знаменателя передаточной функции замкнутой системы относительно ошибки по задающему
воздействию Wεg(s).
Разложим передаточную функцию замкнутой системы относительно ошибки по задающему воздействию Wεg(s) в ряд по возрастающим степеням s (в окрестности точки s = 0).
|
Wεg (s) |
|
1 |
|
|
|
Dраз (s) |
|
|
Kεg |
(s) |
|
|
|
1 Wраз (s) |
|
|
|
|
|
Dεg |
|
|
|
|
|
|
|
Kраз (s) Dраз (s) |
(s) |
|
(6.20) |
|
|
b sn b sn 1 |
... b |
|
|
|
|
|
|
|
|
|
|
C |
C |
s C |
s2 ... C sk . |
|
0 |
1 |
|
|
n |
|
a sn a sn 1 |
... a |
|
|
0 g 1g |
|
2 g |
|
|
|
kg |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
|
n |
|
|
|
|
|
|
|
|
|
|
b sn b sn 1 ... b |
(C |
C s C |
... C |
sk ) |
|
|
0 |
1 |
|
n |
|
|
0 g |
1g |
|
2 g |
|
|
|
kg |
(6.21) |
|
(a sn a sn 1 ... a ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
|
|
|
n |
|
|
|
|
|
|
|
|
Приравнивая члены при равных степенях s уравнения (6.21), полу-
чим:
b C a ; |
|
|
|
|
n |
0 g |
n |
|
|
|
|
b |
C |
a |
a C |
; |
|
|
n 1 |
0 g n 1 |
n 1g |
|
|
(6.22) |
|
|
|
|
|
|
b |
C |
a |
C a |
|
C |
a . |
n 2 |
0 g n 2 |
1g n 1 |
2 g n |
..................................................
Из выражений (6.22) следует:
bn ; C
an 1g
1 (bn 2 an
1 bn k an
|
1 |
(b |
C a |
) |
1 |
(b |
a |
|
bn |
); |
a |
a |
|
|
n 1 |
0 g n 1 |
|
n 1 |
|
n 1 a |
|
n |
|
|
|
n |
|
|
|
n |
C a |
C |
a |
n 1 |
); |
(6.23) |
0 g n 2 |
1g |
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
C(k r ) g an r |
b |
|
0, при k n; |
|
|
|
|
n k |
|
r 1 |
|
|
|
an r 0, при r n. |
Индекс последнего коэффициента равен порядку системы k = n (вычисляется (n + 1) коэффициент, начиная с C0g).
С учетом этого ряд (6.18) имеет вид:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε |
|
(t) C* |
g(t) C* |
|
dg(t) |
C* |
d 2 g(t) |
... C* |
d k g(t) |
. (6.24) |
|
|
|
|
|
|
|
dtk |
|
g |
0 g |
1g |
dt |
|
|
2 g |
dt2 |
|
kg |
|
Из сопоставления ряда (6.18) с рядом (6.24) следует, что: |
|
|
|
|
C |
C |
; |
|
C C |
; |
|
|
|
|
|
|
|
|
0 g |
|
|
|
0 g |
|
|
1g |
1g |
|
|
|
|
|
|
|
|
|
C |
|
1 |
|
|
|
; C |
|
1 |
|
|
|
|
(6.25) |
|
|
|
C |
|
C . |
|
|
|
|
|
|
|
|
|
|
|
|
2 g |
|
|
2 |
|
2 g |
kg |
|
k! |
kg |
|
|
Из (6.20) следует также, что коэффициенты ряда ошибок можно получить путем деления полинома числителя на полином знаменателя передаточной функции замкнутой системы относительно ошибки по задающему воздействию.
Аналогично рассчитываются коэффициенты ряда ошибок по возмущающему воздействию.
Ошибка, создаваемая возмущением, имеет вид:
ε |
|
(t) C |
f (t) C |
df (t) |
|
1 |
C |
d 2 f (t) |
... |
1 |
C |
d k f (t) |
. (6.26) |
|
|
|
dt2 |
|
dtk |
|
f |
0 f |
1 f |
dt |
|
2! 2 f |
|
k! kf |
|
При этом для вычисления коэффициентов ряда (6.26) используется передаточная функция замкнутой системы относительно ошибки по возмущающему воздействию:
|
|
|
|
|
|
W fε (s) |
|
|
|
|
|
|
|
|
|
|
|
|
Wεf |
|
|
пр |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 Wраз |
(s) |
|
|
|
|
|
|
|
|
|
[Wεf (s)]s 0 ; C1 f [ |
dWεf |
(s) |
|
|
|
|
|
С0 f |
|
|
|
|
|
]s 0 |
; |
|
|
|
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6.27) |
|
|
|
d 2W (s) |
|
|
|
|
|
|
|
d kW (s) |
|
C |
|
|
|
|
|
|
|
|
|
|
[ |
εf |
] |
|
; ... ; C |
[ |
|
εf |
|
] |
. |
|
|
|
|
k |
|
|
2 f |
|
ds |
s 0 |
|
kf |
|
|
|
|
ds |
|
s 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Коэффициенты ряда ошибок (6.26) могут быть также выражены через коэффициенты полиномов числителя и знаменателя передаточной функции замкнутой системы относительно ошибки по возмущающему воздействию:
|
|
|
Wпрfε (s) |
|
b sn b sn 1 |
... b |
s b |
|
W |
(s) |
|
|
|
0 |
1 |
n 1 |
n |
|
|
|
|
|
|
|
|
|
εf |
|
|
1 Wраз (s) |
|
a0sn a1sn 1 ... an1s an |
(6.28) |
|
|
|
|
C |
C |
s ... C |
sk . |
|
|
|
|
|
|
|
0 f |
|
1 f |
|
kf |
|
|
|
|
|
|
|
При этом по прежнему считаем, что формально порядок полинома числителя равен порядку полинома знаменателя, в отсутствующих членах условно принимаем bj = 0.
C учетом этого из (6.28) получаем:
|
b sn b sn 1 ... |
b (C |
C |
s C |
... |
C |
sk ) |
|
0 |
|
|
|
|
1 |
|
|
n |
|
|
0 f |
|
|
1 f |
|
2 f |
|
|
kf |
|
|
(a sn a sn 1 |
... |
a ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
1 |
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
Из выражения (6.29) следует: |
|
|
|
|
|
|
|
|
|
|
|
|
C* |
|
|
bn |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 f |
|
|
|
an |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
1 |
|
(b |
a |
|
bn |
) |
1 |
|
(b |
|
C |
a |
|
); |
|
|
a |
|
|
a |
|
|
|
|
|
1 f |
|
|
n 1 |
n 1 a |
|
|
|
n 1 |
|
|
0 f |
n 1 |
|
|
|
|
|
|
|
n |
|
|
|
|
n |
|
n |
|
|
|
|
|
|
|
|
|
|
C |
|
1 |
|
(b |
C |
|
a |
C |
a |
|
); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 f |
|
|
|
an |
|
n 2 |
0 f |
n 2 |
|
|
1 f |
|
n 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
..........................................................................................
|
|
1 |
|
k |
b |
0, |
при |
k n; |
|
|
|
Ckf |
|
|
bn k C(k r ) f |
an r n k |
|
|
r n. |
|
|
|
|
|
an |
r 1 |
an r 0, |
при |
При этом ряд (6.26) принимает вид:
f (t) C0* f f (t) C1*f
где
C0 fC2 f
df (t) |
C* |
d 2 f (t) |
... C* |
|
dt2 |
dt |
2 f |
kf |
C0 f ; C1 f C1 f ;
12 C2 f ; Ckf k1!Ckf .
Проведем анализ коэффициентов ряда ошибок. В статической системе: