

Известия вузов Геодезия и аэрофтосъемка №6
.pdfгеодезия и кадастр
мацией. Нагрузка на глаз оператора приводит |
Геодезические измерения представляют |
|
к очень быстрой его утомляемости, появлению |
собой комплекс измерений, выполненный по |
|
ошибокпервогоивторогорода.Автоматизация |
некоторой схеме, что сильно отличает такие |
|
различных операций визуальной оценки изме- |
измерения от измерений в других отраслях, |
|
рительной информации приведет к снижению |
где, как правило, измеряется одна или две ве- |
|
влияния психофизиологических характери- |
личины. Поэтому характеристики качество и |
|
стик оператора на качество измерений. |
надежность относятся как к отдельным изме- |
|
Естественно, что более опытный и квали- |
рениям, так и ко всему комплексу измерений. |
|
фицированный оператор выполнит измерения |
На этапе измерений важно соблюдение всех |
|
более качественно. Поэтому при подборе ра- |
инструкций и стандартов, о чем должен поза- |
|
бочей бригады для выполнения геодезических |
ботиться руководитель работ. |
|
работ необходимо ориентироваться на здра- |
Поскольку геодезические измерения пред- |
|
вый компромисс между оплатой работы и тре- |
ставляют собой комплекс измерений геопро- |
|
буемым уровнем квалификации и опыта опе- |
странственных данных, то камеральная об- |
|
ратора. |
работка должна позволять убедиться в том, |
|
Обработке результатов измерений (с ис- |
что проведенные измерения надежны, отсут- |
|
пользованием методов уравнивания и других) |
ствуют грубые ошибки, учтены ошибки систе- |
|
посвящено много работ ученых-геодезистов. |
матические, обеспечена точность измерений, |
|
Измерения в геодезии включают три этапа: |
оговоренная в задании на проведение работ. |
|
подготовительный, измерения и камеральная |
Как видно из изложенного, надежность |
|
обработка. |
и качество геодезических измерений зави- |
|
Проведению измерений предшествует |
сят от очень большого количества факторов. |
|
подготовительный этап, на котором подбира- |
Построение системы управления качеством |
|
ются измерительные приборы, комплектуется |
геодезических измерений является важной за- |
|
бригада исполнителей на основании квали- |
дачей как в техническом, так и экономическом |
|
фикации, анализируются и подбираются про- |
плане. |
|
граммные средства, изучаются стандарты и |
литература |
|
инструкции, проводится инструктаж. От того |
||
насколько тщательно будет проведена эта ра- |
1. Спиридонов А.И. Основы геодезической метрологии. |
|
–М.: Картгеоцентр-Геодезиздат, 2003. –248 с. |
||
бота в большей степени зависит качество из- |
Поступила 29 июня 2010 г. |
|
мерительных работ. |
||
|
КВОПРОСУ ОБ УРАВНИВАНИИ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ, ПОСТРОЕННЫХ В РАЗНЫХ СИСТЕМАХ КООРДИНАТ
Аспирант И.А. Клыпин
Московский государственный университет геодезии и картографии Е mail: axeldickhead@mail.ru
Аннотация. Приводится вариант алгоритма объединения плановых геодезических сетей, построенных в разных системах координат, который отвечает большинству требований, предъявляемых на сегодняшний день к уравнительным вычислениям. Показана возможность его реализации на примере модели двух сетей с тремя общими пунктами.
Ключевые слова: параметры преобразования координат, объединение геодезических сетей
Abstract.An algorithm for unification of plane geodesic networks of different coordinate systems, that meets the mass of requirements for equalization calculations. The possibility of its implementation on the model of two networks with three general points is shown.
Keywords: coordinate transformation parameters, the union of geodesic networks
Задача уравнивания геодезических сетей, построенных в разных системах координат, является на сегодняшний день весьма актуаль-
нойисвязана,преждевсего,снеобходимостью объединения таких сетей по причине того, что большинство плановых построений сегодня
11

известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
создаётся в локальных системах координат, а |
|
VS |
− AVT −GS V∆a + Wi = 0 |
|
|
|
|||||||||||||||||||||||
старые сети обновляются при помощи GPS и |
отдельно для каждой из осей координат, и вы- |
||||||||||||||||||||||||||||
некоторых других современных измерений. |
|||||||||||||||||||||||||||||
полняя контроль грубых ошибок, в результате |
|||||||||||||||||||||||||||||
Весьма просто и удобно, на наш взгляд, |
|||||||||||||||||||||||||||||
будем иметь уравненные векторы координат |
|||||||||||||||||||||||||||||
такую задачу можно решить, используя алго- |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
ритм, |
основанный на теории рекуррентного |
S |
, T и вектор параметров преобразования ко- |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
уравнивания [1], во многом аналогичный ис- |
ординат a . |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Используя уравненные значения параме- |
||||||||||||||||||||||||||||
пользуемому при объединении спутниковых |
|
||||||||||||||||||||||||||||
тров преобразования, теперь нужно лишь пе- |
|||||||||||||||||||||||||||||
и наземных сетей [2]. Однако в нашем случае, |
|||||||||||||||||||||||||||||
ревести вектор координат S в систему коорди- |
|||||||||||||||||||||||||||||
так как уравнивание производится на плоско- |
нат T. При этом их подвекторы, относящиеся |
||||||||||||||||||||||||||||
сти, не требуется преобразовывать координа- |
к идентичным пунктам, в идеале должны со- |
||||||||||||||||||||||||||||
ты идентичных пунктов в пространственные |
впасть, что будет являться контролем постав- |
||||||||||||||||||||||||||||
координаты и не нужны геодезические высоты |
|||||||||||||||||||||||||||||
и значения аномалий высот. |
|
|
|
|
леннойзадачи.Остаётсятолько,найдяматрицу |
||||||||||||||||||||||||
|
|
|
|
обратных весов вектора уравненных величин и |
|||||||||||||||||||||||||
Рассматривая сразу относящиеся к разным |
|||||||||||||||||||||||||||||
определив квадратичную форму, произвести |
|||||||||||||||||||||||||||||
сетямвекторыкоординатS иT какизмеренные |
|||||||||||||||||||||||||||||
оценку точности полученных результатов со- |
|||||||||||||||||||||||||||||
величины с известными матрицами обратных |
|||||||||||||||||||||||||||||
гласно всем известной формуле теории матема- |
|||||||||||||||||||||||||||||
весов QS |
и QT, соответственно, уравнения свя- |
||||||||||||||||||||||||||||
тической обработки геодезических измерений. |
|||||||||||||||||||||||||||||
зи для общих пунктов i в линейном виде будут |
|
Экспериментально данный алгоритм был |
|||||||||||||||||||||||||||
иметь вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
реализован в программной среде MathCAD на |
||||||||||||||||
|
|
|
VS |
− AVT |
−GS ∆a + Wi = 0, |
|
|||||||||||||||||||||||
|
|
|
|
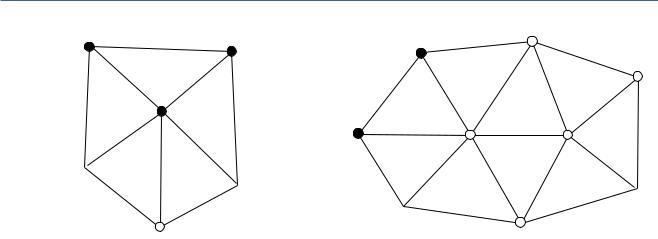
примере моделей двух сетей (рис. 1 и 2), по- |
|||||||||||||||||||||||||
где VS = (δx |
|
δy)TS , |
VT |
= (δx |
|
δy)TT ; |
|
строенныхвразныхсистемахкоординатииме- |
|||||||||||||||||||||
|
|
|
ющих общие пункты P1, P2 и T1. Результаты |
||||||||||||||||||||||||||
α |
−β |
|
|
|
|
1 |
|
0 |
x |
−y |
|
уравнивания каждой из сетей представлены в |
|||||||||||||||||
A = |
β α |
|
; |
|
GS |
= |
|
|
|
i |
|
i |
; век- |
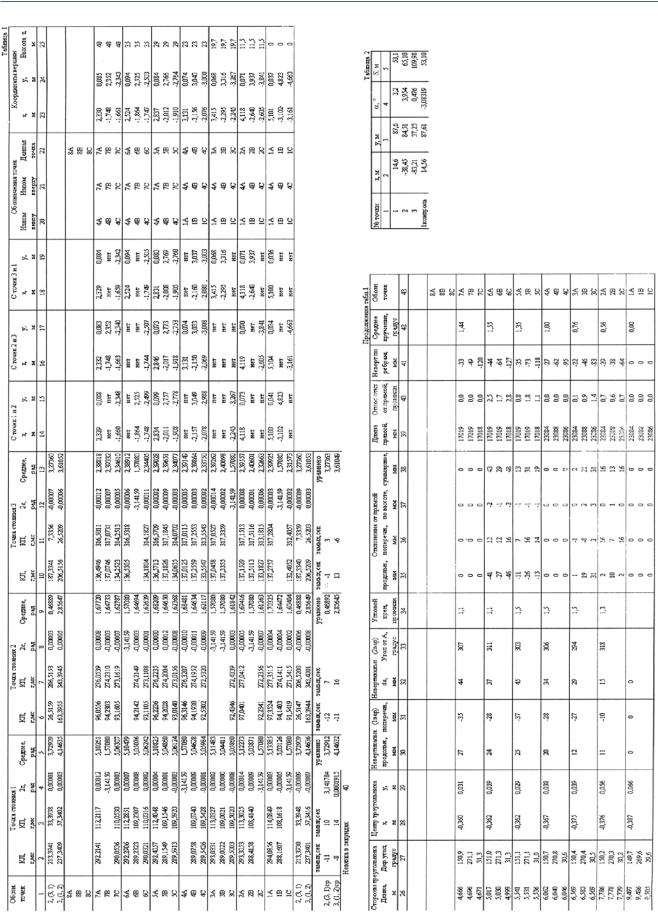
табл. 1. |
|
|
|
|
|
|
Т а б л и ц а 1 |
||||||||
|
|
|
|
|
|
|
0 1 y x |
|
S |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
i |
i |
|
Результаты уравнивания сети I и сети II |
|
|||||||||||||||
тор |
|
a |
содержит |
поправки |
к приближён- |
|
|
||||||||||||||||||||||
|
|
Номер пункта |
|
x, м |
|
|
y, м |
Mx, м |
|
My, м |
|||||||||||||||||||
ным значениям параметров преобразования; |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
Сеть I |
|
|
|
|
|
|||||||||||||||||||||
|
x |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
(0) |
|
|
|
|
|
|
T1 |
|
150,347 |
|
200,331 |
0,201 |
|
0,128 |
|||||||||
Wi = |
|
− |
|
|
−Gi ∆a |
— вектор невязок. |
|
|
|
|
|||||||||||||||||||
|
|
|
T3 |
|
250,176 |
|
99,956 |
0,186 |
|
0,232 |
|||||||||||||||||||
|
y S |
y T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
T5 |
|
149,984 |
|
100,004 |
0,119 |
|
0,273 |
||||||||||
Вектор ∆a(0) |
приближённых значений па- |
|
Р1 |
|
250,322 |
|
200,357 |
0,263 |
|
0,207 |
|||||||||||||||||||
раметров преобразования находится по двум |
|
Р2 |
|
200,457 |
|
150,822 |
0,165 |
|
0,277 |
||||||||||||||||||||
|
Р4 |
|
200,771 |
|
50,570 |
0,144 |
|
0,192 |
|||||||||||||||||||||
пунктам по формуле |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
Сеть II |
|
|
|
|
|||||||||||||||
|
|
|
|
|
∆a(0) |
= G−S1(S −T)4×1. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
T1 |
|
100,576 |
|
100,813 |
0,0127 |
|
0,0134 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
T2 |
|
100,578 |
|
200,809 |
0,0172 |
|
0,0119 |
||||
Далее формируется матрица перехода |
|
|
|
|
|||||||||||||||||||||||||
|
T4 |
|
175,643 |
|
250,840 |
0,0134 |
|
0,0167 |
|||||||||||||||||||||
γ =∆a(0) |
= (G−S1 |
0 0 GT−1 |
0 |
0)7(kT +kS ), |
|
T6 |
|
200,215 |
|
200,579 |
0,0158 |
|
0,0214 |
||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
P1 |
|
200,851 |
|
100,124 |
0,0168 |
|
0,0334 |
||||
блоки которой будут иметь нулевые значения |
|
P2 |
|
150,722 |
|
50,890 |
0,0141 |
|
0,0195 |
||||||||||||||||||||
за исключением G−S1 и GT−1 , расположенных в |
|
P3 |
|
150,021 |
|
150,392 |
0,0117 |
|
0,0144 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
P5 |
|
150,659 |
|
225,051 |
0,0105 |
|
0,0119 |
||||
ней согласно номерам пунктов, участвующих |
|
P6 |
|
125,707 |
|
250,742 |
0,0266 |
|
0,0351 |
||||||||||||||||||||
в вычислении параметров. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
В случае объединения этих сетей и при- |
||||||||||||||||||||||||
Затем согласно [1] получаем корреляцион- |
|
||||||||||||||||||||||||||||
менения рассматриваемого для данной цели |
|||||||||||||||||||||||||||||
ную матрицу |
|
|
|
|
|
|
|
|
|
|
|
алгоритма |
получили |
уравненные |
значения |
||||||||||||||
|
|
|
|
|
|
|
|
QS |
|
|
0 |
QS ,a |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
координат |
в |
единой |
сети. Уравненные |
зна- |
|||||||||||||||
|
|
|
Q S |
= |
|
|
0 |
|
QT |
|
|
|
|
чения параметров преобразования |
для |
кон- |
|||||||||||||
|
|
|
|
|
|
QT ,a |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
QS ,a |
|
QT ,a |
|
Qa |
|
|
кретно рассматриваемого примера: ax = 49,735 |
||||||||||||||
|
|
|
|
T |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
м; a = 99,932 м; φ = 89°59′58,4″; m = 1,001, а их |
|||||||||||||||||
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
||||||||||||||||
и далее, учитывая по рекуррентным формулам |
|
y |
|
характеристики |
σax = 0,026м; |
||||||||||||||||||||||||
точностные |
|||||||||||||||||||||||||||||
каждое из условных уравнений |
|
|
|
σ |
= 0,032м; σ = 1,9″; σ |
m |
= 0,001. |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ay |
|
φ |
|
|
|
|
|
|
|||
12
|
геодезия и кадастр |
|
|
P1 |
|
P1 |
T6 |
T1 |
|
||
|
|
|
T4 |
P2
P2 |
P3 |
P5 |
|
T3
 T5
T5
T4 |
Рис. 1. Схема сети I
Уравненныезначениякоординатиихоценка точности представлена в табл. 2.
Т а б л и ц а 2
Результаты совместного уравнивания сети I и сети II
Пункт |
x, м |
y, м |
Mx, м |
My, м |
T1 |
100,010 |
100,443 |
0,0042 |
0,0042 |
T2 |
100,988 |
200,070 |
0,0043 |
0,0045 |
T3 |
200,613 |
0,612 |
0,0045 |
0,0043 |
T4 |
175,581 |
250,265 |
0,0042 |
0,0039 |
T5 |
100,192 |
0,684 |
0,0042 |
0,0042 |
T6 |
200,534 |
200,928 |
0,0037 |
0,0028 |
Р1 |
200,913 |
100,219 |
0,0043 |
0,0037 |
Р2 |
150,205 |
50,988 |
0,0041 |
0,0042 |
Р3 |
150,193 |
150,211 |
0,0043 |
0,0028 |
Р4 |
150,469 |
–50,643 |
0,0037 |
0,0043 |
Р5 |
150,499 |
225,443 |
0,0036 |
0,0045 |
Р6 |
125,328 |
250,117 |
0,0045 |
0,0043 |
 P6
P6
T1
T2
Рис. 2. Схема сети II
Таким образом, опираясь на теорию рекуррентного уравнивания и основываясь на материале, изложенном в [2], достаточно просто получить вероятнейшие значения координат пунктов в единой системе координат с учётом большинства требований, предъявляемых на сегодняшний день к уравнительным вычислениям.
литература
1.Маркузе Ю.И. Основы метода наименьших квадратов и уравнительных вычислений: Учебное пособие. –М.: МИИГАиК, 2005. –288 с.
2.Маркузе Ю.И. О преобразовании координат спутниковых и наземных геодезических сетей. // Изв. Вузов. «Геодезия
иаэрофотосъёмка». 2009. –№4. –С. 40–44.
Поступила 7 октября 2010 г. Рекомендована кафедрой геодезии МИИГАиК
ИЗМЕРЕНИЯ ГЕОМЕТРИИ ВЫСОКИХ СТАЛЬНЫХ ТРЁХГРАННЫХ СООРУЖЕНИЙ
Доцент, кандидат техн. наук Ч.Н. Желтко, аспирант Д.А. Гура, аспирант Г.Г. Аветисян
Кубанский государственный технологический университет, г. Краснодар
E-mail: gda-kuban@mail.ru
Аннотация. Разработана методика определения крена, прямолинейности и кручения башенного сооружения из стальных труб, в которой снимают отсчёты по горизонтальному кругу теодолита (тахеометра) на нужные точки сооружения и вставляют отсчёты в соответствующие ячейки электронной таблицы Excel. Результаты измерений автоматически отображаются в соответствующих графах таблицы и на рисунках.
Ключевые слова: электронный тахеометр, измерение, обработка, крен, прямолинейность, кручение
Abstract. The technique of roll, torsion, and alignment definition for a steel pipe tower through TPS (theodolite) measurements of the construction nesessary points is developed. The measurements are inserted to corresponding cells of an Excel spreadsheet. The results are automatically displayed in the corresponding columns of the table and in diagrams.
Keywords: Electronic total station, measuring, processing, roll, straightforwardness, torsion
Введение. Имеется немало различных способов измерения невертикальности (наклона или крена) высоких сооружений, если они
имеют правильную форму. Для сооружений неправильной формы при строительстве устанавливают специальные марки, за положени-
13
известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
ем которых ведут наблюдения при эксплуа- |
наклона на верх башни в 34°. Несколько слож- |
||||||||||||||||||||||||
тации сооружения. Если форма сооружения |
ней, но возможны, наблюдения точек, в част- |
||||||||||||||||||||||||
неправильная и предварительно установлен- |
ности, электронными тахеометрами под углом |
||||||||||||||||||||||||
ных марок нет, разрабатывают специальные |
наклона до 45°, что соответствует удалению от |
||||||||||||||||||||||||
способы определения невертикальности при- |
сооружения, равном его высоте. Расстояния |
||||||||||||||||||||||||
менительно к конкретному сооружению. Для |
между опорными точками подбираются так, |
||||||||||||||||||||||||
сооружений башенного типа высотой до 85 м, |
чтобы углы засечек при определяемой точке |
||||||||||||||||||||||||
смонтированных из стальных труб и предна- |
лежали в диапазоне от 30 до 150°. С каждой |
||||||||||||||||||||||||
значенных для радиосвязи между ними, требу- |
точки должно быть видно максимальное коли- |
||||||||||||||||||||||||
ется кроме крена определять также непрямо- |
чество определяемых точек башни – вершин |
||||||||||||||||||||||||
линейность отдельных элементов сооружения |
всех треугольников башни. Каждая вершина |
||||||||||||||||||||||||
и его кручение (вращение). |
|
|
|
|
|
треугольника должна быть видна не менее |
|||||||||||||||||||
Целью данной работы является разра- |
чем с двух опорных точек. Точки можно за- |
||||||||||||||||||||||||
ботка методики измерений и их обработки на |
крепить на местности штырями, изготовлен- |
||||||||||||||||||||||||
компьютере для определения трёх параметров |
ными из арматуры диаметром 14–20 мм и дли- |
||||||||||||||||||||||||
геометрии сооружения: крена, непрямолиней- |
ной 45–55 см (рис. 2). К штырю приваривается |
||||||||||||||||||||||||
ности и кручения. На эти параметры есть до- |
горизонтальный отрезок из арматуры длиной |
||||||||||||||||||||||||
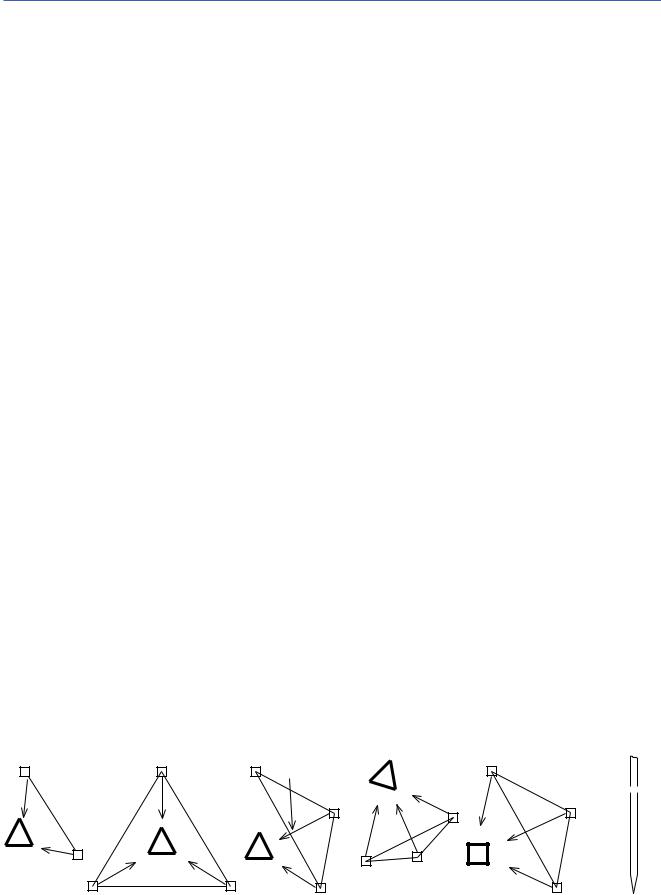
пуски. В методике применяют прямую угло- |
15 см, до уровня которого штырь забивается в |
||||||||||||||||||||||||
вую засечку с двух концов базиса. Так как |
землю. Выступающая над землёй часть штыря |
||||||||||||||||||||||||
наблюдаемых на башне точек довольно много |
высотой 15 см служит для наведения на него |
||||||||||||||||||||||||
и часть точек может быть не видна с одного |
со смежной опорной точки. В верхнем торце |
||||||||||||||||||||||||
или другого конца базиса, а также для надёж- |
штыря высверливается отверстие диаметром |
||||||||||||||||||||||||
ного контроля измерений, желательно исполь- |
3–4 мм глубиной 2–3 мм. Собственно опорной |
||||||||||||||||||||||||
зовать ещё один базис. В результате получим |
точкой является это отверстие. Над ним опти- |
||||||||||||||||||||||||
схему наблюдений точек башни с трёх опор- |
ческимотвесомтеодолитацентрируютприбор. |
||||||||||||||||||||||||
ных точек базисного треугольника. |
|
|
|
|
|
Опорныеточкинумеруютцифрамипроизволь- |
|||||||||||||||||||
Ниже приведено описание способа наблю- |
но, но по часовой стрелке. Рёбра трёхгранной |
||||||||||||||||||||||||
дений и их обработки с трёх опорных точек |
башни обозначают буквами А, В и С. Впереди |
||||||||||||||||||||||||
для трёхгранных сооружений. Возможны на- |
приписывают цифру, соответствующую номе- |
||||||||||||||||||||||||
блюдения и обработка с двух опорных точек |
ру треугольника (яруса), считая снизу вверх. |
||||||||||||||||||||||||
для трёхгранных сооружений и с трёх точек |
|
Производство измерений. Измерения на |
|||||||||||||||||||||||
для четырёхгранных сооружений, которые |
точки башни выполняют электронным тахео- |
||||||||||||||||||||||||
выполняются аналогично (рис. 1). |
|
|
|
|
|
метром или теодолитом типа 3Т5 при двух кру- |
|||||||||||||||||||
Подготовка к измерениям. Три опорные |
гах: круг лево (КЛ) и круг право (КП) одним |
||||||||||||||||||||||||
точки выбирают так, чтобы можно было на- |
приёмом (двумя полуприёмами). Отсчитывают |
||||||||||||||||||||||||
вести зрительную трубу теодолита на верхние |
толькогоризонтальныйкруг.Тахеометр(теодо- |
||||||||||||||||||||||||
точки башни без затруднений и использования |
лит) тщательно центрируют над опорной точ- |
||||||||||||||||||||||||
специальных призм. Если позволяют условия |
кой и горизонтируют. Начальная ориентировка |
||||||||||||||||||||||||
местности, рекомендуется опорные точки вы- |
круга может быть произвольной. Отсчёты за- |
||||||||||||||||||||||||
бирать на удалении от башни, равном полу- |
писывают в запоминающее устройство прибо- |
||||||||||||||||||||||||
торной высоте башни. Это соответствует углу |
ра или в журнал в той последовательности, в |
||||||||||||||||||||||||
1 |
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
|
|
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
3 |
|
2 |
|
|
|
|
3 |
3 |
|
|
|
|
|
|
|
|
3 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1. Возможные схемы измерений |
|
|
|
|
|
|
|
|
|
|
Рис. 2 |
||||||||||
14

геодезия и кадастр
которой они указаны в графе 1 табл. 1. В жур- |
теодолита колебание величин 2 с допускается |
||||||||||||||||||||||||||
нале три графы (обозначения точек, КЛ и КП). |
0,00010 рад (20″). Если расхождение больше |
||||||||||||||||||||||||||
Полуприём |
начинают |
с |
наблюдениий |
допуска и точка измерена с трёх опорных то- |
|||||||||||||||||||||||
опорных точек. Нельзя переставлять местами |
чек, то эти измерения при обоих кругах лучше |
||||||||||||||||||||||||||
отсчёты на две опорные точки. С пункта 1 вна- |
удалить. В графах 5, 9 и 13 вычисляются сред- |
||||||||||||||||||||||||||
чале наблюдают точку 2, затем 3. С точки 2 на- |
ние отсчёты при обоих кругах. |
|
|
|
|
|
|
|
|
||||||||||||||||||
блюдают точку 3, затем 1. С точки 3 вначале |
|
Контролируют также незамыкание — раз- |
|||||||||||||||||||||||||
точку 1, затем 2. При наблюдении опорной точ- |
ность отсчётов на опорные точки в конце и |
||||||||||||||||||||||||||
ки наводят вертикальной нитью зрительной |
начале полуприёма. Незамыкания в секундах |
||||||||||||||||||||||||||
трубы теодолита на середину верхнего торца |
дуги приводятся внизу табл. 1 в графах 2, 3, |
||||||||||||||||||||||||||
выступающего над землёй штыря. Если он не |
6, 7, 10, 11 и допускаются 20–30″. Так как в ба- |
||||||||||||||||||||||||||
виден, ставят над точкой какую-нибудь марку, |
зисном треугольнике измерены все углы, де- |
||||||||||||||||||||||||||
обеспечивающую точность наведения в попе- |
лается контроль суммы углов треугольника и |
||||||||||||||||||||||||||
речном направлении не хуже 1 мм. Затем наво- |
уравнивание углов. Невязку в треугольнике |
||||||||||||||||||||||||||
дят на вершины треугольников каждого яруса. |
вычисляют по формуле |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Точкой наведения может служить середина |
|
|
|
|
|
|
|
fβ = ∑βi −180°, |
|
|
|
|
|
|
|
,(1) |
|||||||||||
(ось) вертикальной трубы на уровне осей го- |
|
|
|
|
|
|
|
Ni′′ |
|
|
|
|
|
||||||||||||||
ризонтальных труб. Возможны и другие вари- |
где βi = Ni′′− Ni′, (i = 1, 2, 3); Ni′, |
|
— средние |
||||||||||||||||||||||||
анты. При этом нужно учесть, что вследствие |
отсчёты по горизонтальному кругу при наве- |
||||||||||||||||||||||||||
пирамидальностибашнивсетриточкинаведе- |
дении соответственно на левую и правую точ- |
||||||||||||||||||||||||||
ния каждого треугольника должны находить- |
ки базисного треугольника. |
|
|
|
|
|
|
|
|
||||||||||||||||||
ся на одинаковой высоте. При необходимости |
|
В средние отсчёты (только по сторонам ба- |
|||||||||||||||||||||||||
можно мелом или краской обозначить окруж- |
зисного треугольника) вводят поправки и по- |
||||||||||||||||||||||||||
ностью на вертикальной трубе выбранные |
лучают уравненные направления: |
|
|
|
|
|
|
||||||||||||||||||||
точки. В конце полуприёма вновь наблюдают |
|
|
Ni′′,yp |
= N′′− |
fβ |
, |
Ni′,yp = Ni′+ |
|
fβ |
. |
|
|
(2) |
||||||||||||||
две опорные точки. Отсчёты при замыкании |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
6 |
6 |
|
|
||||||||||||||||||||||
должны быть близки к соответствующим от- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
В результате сумма углов, вычисленная |
||||||||||||||||||||||||||
счётам в начале полуприёма. Допускается рас- |
по уравненным направлениям, составит 180°. |
||||||||||||||||||||||||||
хождение 15–20″. |
|
|
|
Невязка указывается внизу табл. (графа 4) и |
|||||||||||||||||||||||
Второй полуприём выполняют в обратной |
допускается до 30–40″. При большей невязке |
||||||||||||||||||||||||||
последовательности. Затем переходят на сле- |
все измерения следует повторить. Уравненные |
||||||||||||||||||||||||||
дующую опорную точку. |
|
|
отсчёты приведены в графах 5, 9, 13 и идут в |
||||||||||||||||||||||||
Для задания масштаба системы координат |
дальнейшую обработку. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
следует измерить хотя бы одно расстояние, на- |
|
Вычисляют координаты опорных точек по |
|||||||||||||||||||||||||
пример, 1–2 или АВ для нижнего яруса. Для |
формулам прямой геодезической задачи. При |
||||||||||||||||||||||||||
контроля лучше |
измерить |
два расстояния. |
этом координаты x |
, |
y |
точки 1 и дирекцион- |
|||||||||||||||||||||
Расстояния можно измерять нитяным дально- |
ный угол α |
|
|
|
|
1 |
|
1 |
1–2 берут произволь- |
||||||||||||||||||
1,2 |
стороны |
||||||||||||||||||||||||||
мером теодолита. |
|
|
|
но. |
|
|
|
|
|
|
|
|
|
1–2 считают известной. |
|||||||||||||
|
|
|
Длину стороны |
||||||||||||||||||||||||
Обработка |
результатов |
измерений. |
Координаты точки 2 вычисляют по формулам |
||||||||||||||||||||||||
Измеренные отсчёты вводят в графы 2 и 3 для |
x2 = x1 + d1,2 cosα1,2; |
y2 |
= y1 + d1,2 sinα1,2. (3) |
||||||||||||||||||||||||
точки 1 (см. табл. 1), в графы 6 и 7 для точки 2 |
|||||||||||||||||||||||||||
|
Для точки 3 формулы аналогичны: |
|
|
|
|||||||||||||||||||||||
и в графы 10 и 11 для точки 3. Градусы отде- |
|
|
|
|
|||||||||||||||||||||||
ляют запятой. Две цифры после запятой явля- |
x |
= x |
+ d |
2, |
3 |
cosα |
2,3 |
; |
y |
= y + d |
2,3 |
sinα |
2 |
,3 |
, (4) |
||||||||||||
ются минутами, две следующие цифры — се- |
3 |
2 |
|
|
|
|
|
|
|
3 |
2 |
|
|
|
|
|
|||||||||||
при этом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
кундами. Для пропущенных при наблюдениях |
|
|
|
sinβ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
точек ячейки должны быть пустыми. Графы 4, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
8 и 12 служат для контроля выполненных из- |
d2,3 = d1,2 |
|
|
|
|
1,yp |
; α2,3 |
= α1,2 −β2,yp ±180°. (5) |
|||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||
мерений. В них приводятся разности отсчётов |
|
|
|
sinβ3,yp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Для контроля вычисляют координаты точ- |
||||||||||||||||||||||||||
в радианах при КЛ и КП (двойная коллима- |
|
||||||||||||||||||||||||||
ционная ошибка — 2 с). Для пятисекундного |
ки 1 после решения прямых задач по трём сто- |
||||||||||||||||||||||||||
|
|
|
|
ронам треугольника |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
15
известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
16
геодезия и кадастр
x1 = x3 + d3,1 cosα3,1; y1 = y3 + d3,1 sinα3,1, (6)
где
d3,1 = d1,2 sinβ2,yp ; α3,1 = α2,3 −β3,yp ±180°. (7) sinβ3,yp
Втабл. 2 приводятся координаты трёх опорных точек. Длину стороны 1–2, если она измерена, вводят в строку для точки 1 (графа 5). Если измерена другая сторона, нужно изменять длину стороны 1–2 до тех пор, пока измеренная длина не станет равной вычисленной длине.
Можно задать нужную ориентировку башни, например, направить ось ОХ перпендикулярно к линии ВС в сторону ребра А. Для этого нужно изменять дирекционный угол линии 1–2 до тех пор (в примере он равен 3,2 рад), пока дирекционный угол стороны ВС (графа 27, строка 1В) не станет равным 270°. Далее, изменяя координаты точки 1, можно переместить начало координат в середину башни, т.е. сделать нулевые значения в ячейках (графы 28
и29, строка 1А), хотя это практического значения не имеет (в примере координаты равны
–0,387 и 0,066).
Вграфах 14–19 приводятся координаты точек башни, вычисленные прямой угловой засечкой с двух опорных пунктов в трёх комбинациях. Для засечек с точек 1 и 2 определяемой точки Р формулы имеют вид
xP′ = |
x1 tgγ1 − x2 tgγ2 +(y2 − y1)tgγ1 |
tgγ2 |
; |
|
tgγ1 − tgγ2 |
|
|||
|
|
|
|
|
yP′ = |
y1 tgγ1 − y2 tgγ2 +(x1 − x2 )tgγ1 |
tgγ2 |
|
, (8) |
tgγ1 − tgγ2 |
|
|
||
|
|
|
|
|
где γi = Mi,P – Ni,ур; Mi,P — средний отсчёт по горизонтальному кругу при наведении на точку
Р башни; i — номер точки базисного треугольника.
Если с одной из трёх пунктов точка не была видна (ячейки отсчётов пусты), то в двух комбинациях из трёх граф координат появляется слово «нет». В графах 23 и 24 приводятся или средние из трёх пар координат или копируется единственная пара координат. В графу 25 вводят высоты треугольников. В контрольной графе 26 приводятся вычисленные длины сторон треугольников. Для стороны АВ треугольника башни одного яруса формула имеет
вид
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
AB |
= (x |
B |
− x |
A |
)2 |
+(y |
B |
−y |
A |
)2 . |
(9) |
||
|
|
|
|
|
|
|
|
|
|
|||||
Три стороны каждого треугольника должны быть равны между собой. По расхождениям между ними можно оценить точность измерений. Если длины сторон отличаются между собойнеболеечемна4–6см,измеренияможно считать достаточно точными. В графе 27 приводятся дирекционные углы сторон треугольников. Для стороны АВ формула имеет вид:
αAB = arctg |
yB −yA |
. |
(10) |
|
|||
|
xB − xA |
|
|
Три значения для одного треугольника должны отличаться на 120°. Изменение дирекционныхугловодноимённыхсторонразныхпо высоте треугольников обусловлено кручением башни. В графах 28 и 29 приводятся средние из трёх пар координат каждого треугольника. Средние координаты совпадают с пересечением медиан треугольника или центром его тяжести. По разностям координат центров каждого треугольника и нижнего треугольника вычисляются две составляющие (графы 30–31) линейного крена (невертикальности) сооружения. Продольная невертикальность (графа 30) вычисляется в плоскости, содержащей центр сооружения и ребро А. Поперечная невертикальность (графа 31) — в плоскости, параллельной грани ВС. Формулы имеют вид:
∆прод = (xj − x0 )cos(αAB −150°)+ +(y −y )sin(α −150°);
∆попер = −(xj − x0 )sin(αAB −150°)+ (11)
+(yj −y0 )cos(αAB −150°).
Вграфах 32–33 указывается крен в другом виде: смещение ds центра данного треу-j 0 AB
гольника от центра нижнего треугольника и угол α этого смещения, отсчитанный по часовой стрелке от направления на ребро А. Используются формулы:
ds = 
 ∆прод2 + ∆попер2 ;
∆прод2 + ∆попер2 ;
α = arctg yxj −yx0 −αAB +150°. (12)
j − 0
В графе 34 приводится крен центра каждо-
17

известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
го треугольника относительно центра нижнего треугольника в угловой мере (в промилях)
χ = ds z. |
(13) |
В графах 35–37 приводятся три составляющие отклонения данной точки от прямой: продольная (горизонтальная) составляющая dx в плоскости от центра треугольника на данное ребро, поперечная (горизонтальная) составляющая dy в перпендикулярной плоскости и вертикальная составляющая dz. В графе 38 приводится суммарное отклонение L, как кратчайшее расстояние точки от прямой в пространстве. Начало и конец прямой линии следует указать в графах 20 и 21. В графе 22 приводятся обозначения точек (как и в графе 1). В графе 39 приводится длина L прямой, в графе 40 — относительное отклонение точки от прямой как отношение L/L.
Вычисления выполняются в следующей последовательности. Обозначив координаты начала прямой x1, y1, z1, конца прямой x2, y2, z2 и определяемой точки xP, yP, zP, найдём разности
координат:
∆x = x2 − x1; ∆y = y2 −y1; ∆z = z2 − z1; |
(14) |
||||||||||||||||
∆x |
P |
= x |
P |
− x ; ∆y |
P |
= y |
−y ; |
∆z |
P |
= z |
P |
− z . |
|||||
|
|
1 |
|
P |
|
1 |
|
|
|
1 |
|
||||||
|
По ним вычисляются длина прямой |
|
|||||||||||||||
|
|
|
|
L = |
|
|
|
|
|
|
(15) |
||||||
|
|
|
|
|
∆x2 + ∆y2 + ∆z2 , |
|
|
||||||||||
вспомогательная величина |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
Q = ∆x∆xP + ∆y ∆yP + ∆z∆zP , |
|
(16) |
|||||||||||
три составляющие |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
dx |
|
= ∆x |
P |
− |
∆xQ; |
|
|
|
|
|
|
||
|
|
|
|
0 |
|
|
|
|
L2 |
|
|
|
|
|
|
||
|
|
|
|
dy |
|
= ∆y |
− |
∆yQ ; |
|
|
|
|
(17) |
||||
|
|
|
|
0 |
|
|
|
P |
|
L2 |
|
|
|
|
|
|
|
|
|
|
|
dz = ∆zP − ∆zQ2 |
|
|
|
|
|
|
|||||||
и суммарное отклонение |
L |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
∆L = |
|
|
|
|
|
|
|
|
(18) |
||||
|
|
|
|
|
|
dx2 |
+ dy2 |
+ dz2 . |
|
|
|||||||
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
Две составляющие dx0 и dy0 ориентируются к своему ребру по дирекционному углу α:
dx = dx0 cos(α−150°)+ dy0 sin(α−150°); |
(19) |
|
dy = −dx sin(α−150°)+ dy cos(α−150°). |
||
0 |
0 |
|
В графе 41 приводятся отклонения от вертикальной плоскости вершин треугольников по
каждому ребру. Вертикальная плоскость строитсяподвумточкамнижнеготреугольника:центру треугольника с координатами x0, y0, z0 и вершине данного ребра с координатами x1, y1, z1.
Обозначив координаты для определяемой точки xP, yP, zP и найдя разности координат
∆x1 = x1 − x0; |
∆y1 |
= y1 |
−y0 |
; |
(20) |
|
∆xP = x2 − x0; |
∆yP = y2 −y0, |
|||||
|
||||||
получим нужные отклонения по формуле
∆ = |
∆xP ∆y1 −∆x1 ∆yP . |
(21) |
|
|
∆x2 |
+ ∆y2 |
|
|
1 |
1 |
|
Невертикальность по рёбрам башни включает в себя как крен сооружения, так и его кручение. Знак «+» означает, что точка отклоняется от вертикальной плоскости вправо, если смотреть снаружи башни.
Кручение (графа 42) вычисляется как средняя разность трёх дирекционных углов данного и нижнего треугольников.
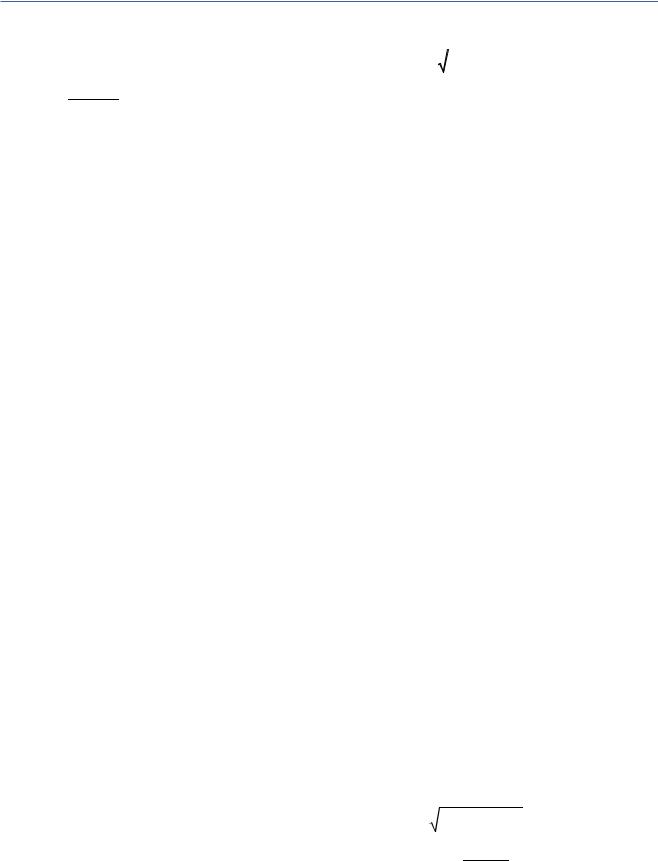
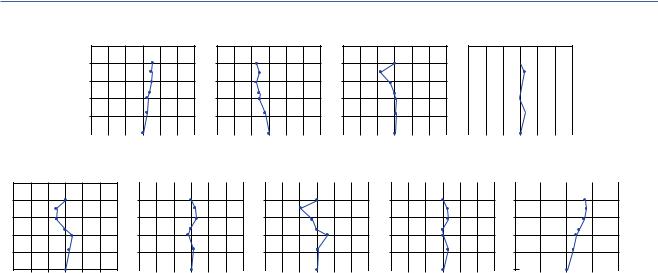
Программа составлена так, что результаты вычислений,приводимыевграфах30–42,неме- няются при изменении координат опорной точки 1 и дирекционного угла линии 1–2. Рисунки (рис. 3) составляются автоматически по данным, взятым из соответствующих граф табл. 1.
Дополнительные функции на модульном листе. Для составления программы вычислений используются известные формулы, приведенные в [1, 2]. Из справочника [2] взяты исходные формулы для расстояния в пространстве от точки до прямой. Формулы были преобразованы для вычисления трёх составляющих кратчайшего отрезка от точки до прямой по координатам трёх точек.
Для вычислений дополнительно к имеющимся в Excel функциям [3] составлено семь программ других функций в среде Visual Basic на одном модульном листе. Функция «ГрадРад» преобразует углы в градусах, минутах и секундах в радианы. Функция «Расст» вычисляет расстояние по координатам двух точек (9). Функция «ДирУгГр» вычисляет дирекционный угол в градусах по координатам двух точек (10). Функция «AtanGr» вычисляет дирекционный угол в градусах по двум приращениям координат. В обеих функциях «ДирУгГр» и «AtanGr» устранен случай некорректных вычислений (деление на ноль) для дирекционных углов 0 и 180°. Функция «ПрямЗасеч» вычисляет прямую засечку по координатам двух опорных точек и двум изме-
18
геодезия и кадастр
H,м 50
40
30
20
10
0
-150
Невертикальная
H,м поперечная
50
40 |
30 |
20 |
10 |
0 |
|
|
|
|
|
|
150 100 |
-50 0 50 100 150 |
|||||
- - |
|
|
|
|||
l
Невертикальная
H,м поперечная
50
40 |
30 |
20 |
10 |
0 |
|
|
|
|
|
|
150 100 |
-50 0 50 100 150 |
|||||
- - |
|
|
|
|||
l
Продольное отклонение
H,м от прямой по ребру А
50
40 |
30 |
20 |
10 |
0 |
|
|
|
|
|
|
150 100 |
-50 0 50 100 150 |
|||||
- - |
|
|
|
|||
l
Поперечное отклонение
H,м от прямой по ребру А
50
40
30
20
10
0 |
|
|
|
|
|
|
b |
150 100 |
-50 |
0 50 100 150 |
|||||
- - |
|
|
|
|
|||
Продольное отклонение |
H,м |
Поперечное отклонение |
H,м |
Продольное отклонение |
H,м |
Поперечное отклонение |
H,м |
Кручение |
||||
от прямой по ребру B |
от прямой по ребру B |
от прямой по ребру C |
от прямой по ребру C |
|
||||||||
|
50 |
|
|
50 |
|
|
50 |
|
|
50 |
|
|
|
|
|
|
|
|
|
|
|
||||
40 |
40 |
40 |
40 |
30 |
30 |
30 |
30 |
20 |
20 |
20 |
20 |
10 |
10 |
10 |
10 |
|
|
|
b |
0 |
|
|
|
|
|
|
b 0 |
|
|
|
|
|
|
|
b 0 |
|
|
|
|
|
|
|
b 0- |
|
|
|
|
Кручение, |
100 |
|
|
|
|
|
-50 0 50 100 150 |
|
|
|
|
-50 0 50 100 150 |
|
|
|
|
-50 0 50 100 |
|
|
|
4 |
-2 0 2 |
4градусы |
||||||||||
50- 0 50 100 150 |
150 100 |
150 100 |
150 100 |
150 |
|
|
|
|
|
|||||||||||||||||||||||
- |
|
|
|
- - |
|
|
|
- - |
|
|
|
- - |
|
|
|
|
|
|
|
|
|
|||||||||||
Рис. 3. Результаты вычисления геометрии стальных трёхгранных сооружений
ренным горизонтальным углам (8). Функция «ВертРёбер» вычисляет отклонение точки от вертикальной плоскости, заданной двумя точками (20), (21). Функция «ПрямолСост» вычисляет пять элементов отклонения точки от прямой линии, заданной обозначениями точек в начале и конце прямой линии (14–19).
Заключение. В разработанной методике определений крена, прямолинейности и кручения стального трёхгранного сооружения требуется снять отсчёты по горизонтальному кругу теодолита (тахеометра) на три вершины каждого яруса (треугольника) сооружения. Отсчёты
затем вставляют в соответствующие ячейки электронной таблицы «Excel». Результаты измерений автоматически отображаются в соответствующих графах табл. 1 и на рис. 3.
литература
1.Справочник геодезиста. В 2-х книгах. Кн. 2 / Под ред.
В.Д.Большакова и Г.П.Левчука. –3-е изд., перераб. и доп. –М.:
Недра, 1985. –440 с.
2.Г. Корн, Т. Корн. Справочник по математике для научных
работников и инженеров. –М.: Наука, 1970. –720 с. 3. Справочная система Microsoft Office Excel 2003.
Поступила 25 марта 2010 г. Рекомендована кафедрой кадастра и геоинженерии КубГТУ
ОЦЕНКА ТОЧНОСТИ ВЫЧИСЛЕНИЯ ДЕФОРМАЦИЙ СООРУЖЕНИЙ ПО РЕЗУЛЬТАТАМ СПУТНИКОВЫХ НАБЛЮДНИЙ
Аспирант Нгуен Вьет Ха
Московский государственный университет геодезии и катографии
E-mail: geodesi@yandex.ru
Аннотация. Геодезические декартовы системы координат, используемые в навигационных спутниковых системах без преобразования, не позволяют выделить осадки наблюдаемого объекта и горизонтальные перемещения. Для этих целей полезно использовать плоские конформные координаты в проекции Гаусса. В статье выполнила оценка точности вычисления деформаций сооружений по результатам спутниковых наблюдений.
Ключевые слова: деформация, спутниковые наблюдения, осадка, пространственные прямоугольные координаты
Abstract. Geodesic Cartesian coordinate system used in satellite navigation systems without conversion do not allow to allocate the observed object’s yielding and horizontal displacement. Flat conformal coordinates in Gauss projection is useful for such solutions. The article gives an assessment of accuracy evaluation for structures’deformation based on satellite observations.
Keywords: monitoring, satellite observations, spatial rectangular coordinates
При наблюдениях за деформациями сооризонтальные смещения. Геодезические деружений необходимо выделить осадки и гокартовы системы координат, используемые
19

известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
в навигационных спутниковых системах без преобразования, не позволяют выделить осадки наблюдаемого объекта и горизонтальные перемещения. Для этих целей полезно использовать плоские конформные координаты в проекции Гаусса, так как они имеют строгую математическую связь с криволинейными геодезическими координатами, а через них и с прямоугольными геодезическими системами координат. Воспользуемся известными зависимостями для оценки точности вычисления деформаций сооружений по результатам спутниковых наблюдений.
Формулы для определения конформных плоских координат x, y и H в проекции Гаусса по геодезическим координатам B и L [1] имеют вид:
x = D+ |
N |
|
l′′2 sin BcosB; |
(1) |
||||||
2ρ2 |
||||||||||
|
|
|
|
|
|
|
||||
y = |
l′′ |
N cosB; |
(2) |
|||||||
|
|
|||||||||
|
|
ρ |
|
|
|
|
|
|
||
H = |
|
|
R |
|
− N, |
(3) |
||||
|
cosB |
|||||||||
|
|
|
|
|
|
|||||
где D — длина дуги меридиана,
|
D = a |
1 |
−e2 |
|
A |
B′′ |
− |
Bd |
sin2B+ |
Cd |
sin4B−... |
|
; |
||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
d |
ρ |
2 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
A =1+ 3e2 |
+ |
45e4 +...; |
|
B = |
3e2 + |
15e4 |
+...; |
C |
|
= |
15 e4 +...; |
||||||||||||||
d |
4 |
|
|
64 |
|
|
|
|
d |
4 |
|
16 |
|
a |
|
|
d |
|
64 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
R = |
X2 +Y2 |
= (N + H)cosB; |
|
N = |
|
|
|
|
|
. |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1−e2 sin2 |
B |
|
|
|
|
|
|||||
Для оценки точности выполним дифференцирование формул (1)–(3), получаем:
dx = dD+ |
N |
sin2Bldl − |
N |
l2 sin2B dB |
+ |
l2 |
sin2BdN; |
|
2ρ2 |
4ρ |
4ρ2 |
||||||
|
|
ρ |
|
|
dy = N cosB dlρ − lNρ sin B dBρ + ρl cosBdN;
dH = cos1B dR− Rcossin2 BB dB−dN.
(4)
(5)
(6)
(7)
Для нахождения зависимости дифференциала широты от изменений декартовых геоцентрических координат дифференцируем формулу Боуринга [2]:
tgB = |
z |
|
r |
3 |
+be |
′2 |
z |
2 |
, |
(8) |
|
R r3 −be2 (1−e2 )R2 |
|||||||||||
|
|
|
|||||||||
где e2 = a2a−2b2 ; e′2 = 1−e2e2 ; r = 
 z2 +(x2 + y2 )(1−e2 ); b = a
z2 +(x2 + y2 )(1−e2 ); b = a
 1−e2 .
1−e2 .
Дифференцируя уравнение (8), получим:
20