

Известия вузов Геодезия и аэрофтосъемка №6
.pdfастрономия, гравиметрия и космическая геодезия
Бóльшая масса любой галактики находится в ее центральной части, где по мнению специалистов имеется сверхмассивная черная дыра. За миллиарды лет масса черной дыры возрастает более чем в 100 раз за счет притока положительной энергии из космического вакуума. Такой прирост массы черных дыр позволяет рассчитать орбитальное движение самых удаленных звезд галактики в пределах общепринятой теории тяготения, без привлечения гипотетической темной материи.
В1998–1999гг.двегруппыастрономов,од- навАвстралии,адругаявСША,проводилиизмерения зависимости светимости сверхновых звезд типа Ia далеких галактик от расстояния до них. Наблюдения показали, что светимость сверхновых падает с расстоянием сильнее, чем согласно расчетам по фридмановской модели с нулевым космологическим членом. Быстрое ослабление светимости сверхновых пытались объяснить наличием межзвездного газа в галактиках, эволюцией сверхновых во времени и другими факторами, но все эти доводы оказались несостоятельными [13, c. 248, 14, с. 230].
По данным астрономических наблюдений за вспышками сверхновых типа Ia далеких галактик был построен график зависимости космологического расстояния R от времени t, прошедшего после Большого взрыва в точке О до вспышки сверхновой (рис. 3). Согласно этому графику в настоящее время t0 расширение Вселенной происходит почти по экспоненциальному закону [14, c. 238]. Ранее, до времени tv≈6–8 млрд лет, оно происходило с замедлением.
По поводу ускоренного расширения Вселенной С. Арефьев пишет: «Сегодня космологи и физики, занимающиеся частицами, пребываютвсостоянииеслинерастерянности,то, во всяком случае, недоумения. Классическая модель космологии уже принята большинством ученых и подтверждается последними наблюдениями, но в ней до сих пор остается зияющая дыра: никто не знает, почему расширение Вселенной ускоряется. Галактики летят вопреки всем законам, расходясь все дальше, исчезая в черной, недостижимой и абсолютно загадочной для нас пустоте. Скорость их полета так велика, что ученые уже предсказывают время, когда наша Вселенная исчезнет» [15].
R 
O |
tV |
tO |
t |
|
|
|
Рис. 3. График ускоренного расширения Вселенной
По словам В.Д. Захарова, для объяснения ускоренного движения далеких галактик была выдвинута «сумасшедшая» гипотеза, согласно которой ускоренное расширение Вселенной происходит под действием космического вакуума, создающего антигравитацию [13, c. 248]. Энергию космического вакуума принято называть гравитационной темной энергией, равномерно распределенной в космическом пространстве. Антигравитация, создаваемая космическим вакуумом, стремится удалить тела друг от друга и тем самым подгоняет разлет галактик и скоплений [14, c.233].
По нашему мнению, в ускоренном расширении Вселенной повинен не космический вакуум, так как в «чистом виде» он нейтрален, а продукты его распада — электроны с отрицательной энергией, которые постоянно излучают в космическое пространство черные дыры. Эти экзотические частицы в нашем действительном мире обречены на вечность, так как в нем отсутствуют позитроны, которые могли бы их уничтожить. Электроны с отрицательной энергией испытывают взаимное электрическое отталкивание и не вступают во взаимодействие с барионной материей по причине антигравитации. Поэтому по мере заполнения космического пространства электронами с отрицательной энергией Вселенная будет расширяться.Современемувеличениемассычерных дыр за счет поглощения позитронов возрастает, так как черные дыры становятся массивнее. Поэтому и приток электронов с отрицательной энергией в космическое пространство увеличивается. А это ведет к ускорению расширения Вселенной, как это видно на рис. 3.
41

известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
На основании вышеизложенного можно заключить, что наша теоретическая новация не только уточняет механизм излучения черных дыр, но и предельно ясно объясняет физическую сущность темной материи и темной энергии. Итак, темная материя и темная энергиярождаютсяврезультатедезинтеграциифизического вакуума сверхсильным гравитационным полем черной дыры. В результате этого феномена свободные позитроны, имеющие положительную энергию, уходят под горизонт событий, пополняя массу черной дыры «темной материей». За счет притока позитронов в течение многих миллиардов лет масса черной дыры увеличивается в сотни раз. В свою очередь свободные электроны, бывшие партнеры позитронов в физическом вакууме, обладающие отрицательной энергией (массой) под действием антигравитационной силы уносятся от черной дыры в космическое пространство. Накачка просторов Вселенной электронами с отрицательной энергией в течение многих миллиардов лет приводит к ее ускоренному расширению в настоящее время, без участия темных сил.
ЛИТЕРАТУРА
1.Фролов В.П. Черные дыры: квантовые процессы, термодинамика, астрофизика // Черные дыры. М.: Мир, 1978.
–С. 5–30.
2.Баранников А.А., Фирсов А.В. Основные концепции со-
временной физики. М.: Высшая школа, 2006. –352 с.
3.Новиков И.Д., Фролов В.П. Физика черных дыр. М.: Наука, 1986. –327 с.
4.Фуллинг С.А. «Излучение» и «поляризация вакуу-
ма» вблизи черной дыры // Черные дыры. М.: Мир, 1978.
–С. 301–309.
5.Черний А.Н. Релятивистская физика космоса. М.: Научный мир, 2010. –480 с.
6.Боулер М. Гравитация и относительность. М.: Мир, 1979.
–215 с.
7. Зельдович Я.Б., Новиков И.Д. Релятивистская астрофизика. М.: Наука, 1967. –654 с.
8.Хокинг С. Краткая история времени. С.Петербург: АМФОРА, 2000. –270 с.
9.Кауфман У. Космические рубежи теории относительно-
сти. М.: Мир, 1981. –351.
10.Николсон И. Тяготение, черные дыры и Вселенная. М.: Мир, 1983. –240 с.
11.Силк Дж. Большой взрыв. М.: Мир, 1982. –391 с.
12.Нарликар Дж. Неистовая Вселенная. М.: Мир, 1985.
–255 с.
13.Захаров В.Д. Тяготение. От Аристотеля до Эйнштейна.- М.: БИНОМ. Лаборат. знаний 2003. –279 с.
14.Черепащук А.М., Чернин А.Д. Вселенная, жизнь, черные
дыры. Фрязино: ВЕК 2, 2004. –320 с.
15. Арефьев С. Взгляд в пустоту // Новый век, 2004, № 6.
–С. 42–48.
Поступила 2 сентября 2010 г. Рекомендована кафедрой физики МИИГАиК
42

космическая съемка. аэрофотосъемка и фотограмметрия
УДК 528.7; 528.711.1
космическая съемка, аэрофотосъемка и фотограмметрия
Формирование угловых параметров космической сканерной съёмки в режимах трёхосного программного управления осью визирования КА
Доцент, кандидат техн. наук В.Г. Андронов, аспирант И.А Клочков,
аспирант Т.В. Мордавченко
Юго-Западный государственный университет, г. Курск
E-mail: tkkaf@inbox.ru
Аннотация. На основе функциональной связи геометрических и пространственно-частотных характеристик космических сканерных изображений разработана модель формирования угловых параметров космической видовой съёмки в режимах трёхосного углового движения КА.
Ключевые слова: космическая сканерная съёмка, сдвиг изображения, смаз изображения, угловые параметры съёмки, программное сканирование линии визирования, трёхосное угловое движение КА
Abstract.Angularparametersformingmodelforspaceobservationimaginginmodeoftriaxialangularmotion of a spacecraft is developed on the basis of functional connection between geometrical and spatial-frequency characteristics of space scanner images.
Keywords: Velocity of space images, space scanner imaging, image shift, image defocusing, angular parameters of imaging, program scanning of an observation line, spacecraft triaxial angular motion
В работе [1] авторами получена общая для различных космических сканерных систем модель скорости движения изображения (СДИ) по полю фотоприёмной структуры в инерциальном пространстве:
V (t) = ω |
(t) |
|
(xn (t)− xS )(yn |
(t)− yS ) +ω |
(t) |
− (xn (t)− xS )2 |
−f |
|
+ω |
z |
(t)[y |
(t)−y |
]− |
|||||||||||||||||||||||||||||||
|
x |
|
|
|
x |
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
y |
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
n |
|
S |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
(x (t) |
− x |
|
|
) |
|
|
|
|
|
|
|
|
(x (t) |
− x |
|
) |
|
|
|
|
||||||||||
|
|
− |
|
|
|
XS (t) (b11(t)− |
n |
|
|
f |
|
S |
|
|
b13 |
(t) |
|
+YS |
(t) (b11(t)− |
|
|
n |
f |
|
|
S |
|
b13(t) |
+ |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
µ(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
(t)− |
(x |
|
(t) |
− x |
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
|||
|
|
+ ZS |
(t) (b31 |
n |
|
f |
|
S |
|
b33(t) ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
V (t) = ω |
(t) |
(yn (t)−yS )2 |
|
+f |
+ω |
y |
(t) − (xn (t)− xS )(yn (t)−yS ) |
|
+ω |
|
(t)[−(x (t)− x )]− |
|||||||||||||||||||||||||||||||||
y |
|
|
|
x |
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
z |
|
|
|
|
|
|
n |
|
S |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
(y (t)−y ) |
|
|
|
|
|
|
|
|
(y (t) |
−y ) |
|
|
|
|
|
||||||||||||||||
|
− |
|
|
|
|
XS (t) (b12 |
(t) |
− |
|
n |
|
|
|
S |
|
|
b13(t) |
+YS (t) b22 |
(t)− |
|
|
n |
|
|
|
|
S |
|
b23(t) |
+ |
|
|||||||||||||
|
|
µ(t) |
|
|
f |
|
|
|
|
|
f |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
(y (t)−y ) |
b33 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2) |
||||||||||
|
+ ZS |
(t) b32 (t)− |
|
n |
|
f |
|
S |
(t) |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
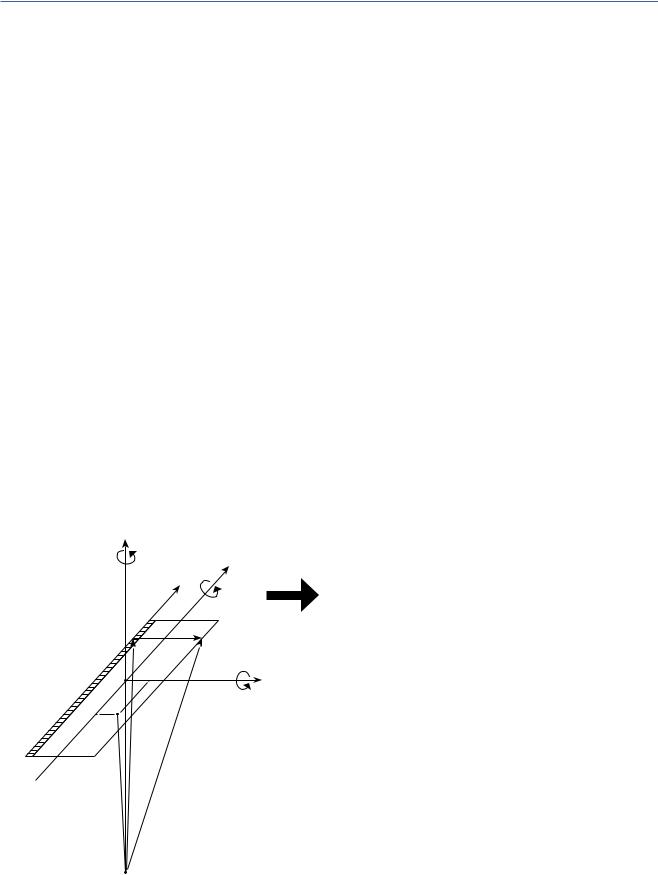
Рассмотрим эту модель (рис.) применительно к сканерным системам, использующих фотоприёмную структуру на матрицах ПЗС. Примем в уравнениях (1), (2) следующие обозначения: Vx(t), Vy(t) — составляющие вектора СДИ соответственно по строкам и столбцам матриц ПЗС;
43
известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
ωx(t), ωy(t), ωz(t), — составляющие вектора абсолютной угловой скорости движения линейки матриц ПЗС в инерциальном пространстве; xn(t), yn(t) — плоские координаты элемента n 1,N матриц ПЗС, формирующего в момент времени t космической съёмки изображение соответственной точки земной поверхности; xS, yS, f — элементы внутреннего ориентирования съёмочной аппаратуры; μ(t) — коэффициент пропорциональности; bij (i = 1, 2, 3; j = 1, 2, 3) — элементы матрицы направляющих косинусов B(t), описывающей в момент времени t ориентацию линейки матриц ПЗС в инерциальном пространстве; XS (t), YS (t), ZS (t)
— составляющие вектора скорости поступательного движения КА в инерциальном пространстве.
Поскольку элементы bij(t) матрицы направляющих косинусов B(t) включают в себя [2] оскулирующие элементы орбиты КА (наклонение орбиты, долготу восходящего узла, аргумент перицентра, истинную аномалию), углы тангажа α(t), крена β(t) и рысканья χ(t) КА, уравнения (1), (2) фактически устанавливают строгую функциональную связь геометрических и пространственно-частотных характеристик формируемых сканерных изображений. Очевидно, что если предъявить соответствующие требования к величине и характеру изменения составляющих СДИ на интервале съёмки, то на базе уравнений (1),
|
|
z |
|
|
|
|
|
|
|
ωz(t) |
|
ω |
(t) |
y |
|
|
|
|
Vy(t) |
КА |
|||
|
|
|
y |
|
|
||
|
|
n=1 |
Vx(t) |
|
|
||
|
|
r |
|
|
|||
|
o |
xs |
|
|
|
ωx(t) |
|
|
|
|
|
|
x |
||
|
|
|
|
|
|
|
|
ys |
s |
r(t0) |
|
|
|
|
|
n=N |
|
|
r(t0+ττ ) |
|
|
||
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
Рис. К определению параметров модели СДИ |
|||||||
(2) можно сформировать законы изменения во времени параметров углового движения КА в различных режимах космической сканерной съемки. В настоящее время для сканерных систем высокого и сверхвысокого разрешения [3, 4] широко используются режимы трёхосного углового движения КА в процессе съёмки, которые обеспечивают большую манёвренностьипроизводительностьэтихсовременных систем космического видового наблюдения. В этой связи в работе предлагается модель формирования угловых параметров движения космических сканерных съёмочных систем для одного из таких режимов съёмки.
Известно [5, 6], что в процессе формирования сканерных изображений не должно происходить сложение сигналов изображения от примыкающих друг к другу участков местности (явление «смаза» изображения). Это условие выполнимо, если в геометрическом центре xn(t) = xц; yn(t) = yц линейки матриц ПЗС скорость движения зарядовых пакетов по строкам матриц ПЗС будет постоянной и равной значению некой номинальной скорости
|
Vx (t) |
|
x |
(t)=x =Vн = const. |
(3) |
|
|
||||
|
|
|
n |
ц |
|
|
|
|
yn |
(t )=yц |
|
V |
Вместестем |
|
,дляобеспеченияпостоянства |
||
(t) не только во времени, но и в пространстве, |
|||||
аx |
именно в плоскости матриц ПЗС, |
логично |
|||
потребовать, чтобы на интервале съёмки выполнялись ещё и следующие условия:
Vy (t) |
|
xn (t)=xц |
= 0; |
(4) |
||
|
||||||
|
|
yn (t )=yц |
|
|
||
∂Vx (t) |
= 0. |
(5) |
||||
∂y |
|
xn (t)=xц |
||||
|
||||||
|
|
|
|
yn (t )=yц |
|
|
Понятно, что одновременное выполнение условий (3)–(5) обеспечивает синхронность движения зарядовых пакетов по всем матрицам ПЗС. Учитывая соотношение [2]:
1 |
= b31(t)(xn (t)− xS )+b32 (t)(yn (t)−yS )+b33(t)f |
, |
µ(t) |
Z(t)− ZS (t) |
|
продифференцируем уравнение (1) по координате y и подставим в уравнения (1), (2) и в полученные выражения условия формирования изображения (3)–(5).
В результате простых преобразований получим систему трёх уравнений связи угловых параметров съемки с требуемыми значениями составляющих СДИ в следующем виде:
44
космическая съемка. аэрофотосъемка и фотограмметрия
V |
= ω |
(t) |
(xц |
− xS )(yц −yS ) |
|
+ω |
(t) |
− |
(xц − xS )2 |
−f |
|
+ω |
(t) y |
−y |
−q |
(t); |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
н |
x |
|
|
f |
|
|
|
|
|
y |
|
|
|
f |
|
|
z |
ц |
S |
|
1ц |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
= ω |
(t) |
|
(yц |
−yS )2 |
+f |
|
+ω |
|
(t) |
− |
(xц − xS )(yц |
−yS ) |
|
+ω |
(t)−(x − x |
|
) −q |
|
(t); |
(6) |
|||||||
|
|
|
|
|
|
|
|
|
S |
2ц |
||||||||||||||||||
|
x |
|
|
f |
|
|
y |
|
|
|
|
|
f |
|
|
z |
|
ц |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0= ωx (t) (xц −f xS ) +ωz (t)−q3ц (t).
Вуравнении (6) приняты следующие обозначения: индекс «ц» при переменных, входящих
вправые части системы уравнений (6), означает, что соответствующие значения величин должны вычисляться относительно геометрического центра линейки матриц ПЗС, т.е. при значениях
xn(t) = xц; yn(t) = yц; |
1 |
|
|
|
|
|
|
|
|
|
xц |
− xS |
|
|
|
|
|
|
|
|
|
|
|
|
|
xц − xS |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
q1ц |
(t) = |
|
|
|
X S |
(t) b11 |
(t)− |
|
|
|
|
b13 |
(t) |
+YS |
(t) b21 |
(t)− |
|
|
|
b23(t) + |
|||||||||||||||||
|
|
|
f |
|
|
f |
|
||||||||||||||||||||||||||||||
|
|
|
µц (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
x |
− x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
+ ZS (t) b31 |
(t)− |
ц |
|
S |
|
|
b33 |
(t) |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
1 |
|
|
|
|
|
|
|
|
|
yц |
−yS |
|
|
|
|
|
|
|
|
|
|
|
|
|
yц −yS |
|
|
|
|
||||||
q2ц |
(t) = |
|
|
|
X S |
(t) b12 |
(t)− |
|
|
|
|
b13 |
(t) |
+YS (t) b22 |
(t)− |
|
|
|
b23 |
(t) |
+ |
||||||||||||||||
|
|
|
f |
|
|
f |
|
|
|||||||||||||||||||||||||||||
|
|
|
µц (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
+ ZS (t) |
|
|
|
|
|
y |
−y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
b32 |
(t)− |
ц |
|
S |
|
b33 |
(t) |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
q3ц (t) = µц (t) |
|
b32 (t) |
|
q1ц. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Zц (t)− ZS (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Обозначив далее |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
V (t) = V ,0,0 T; |
|
ω(t) = ω |
(t),ω (t),ω |
(t) T; |
|
|
(t) = q |
(t),q |
(t),q |
|
(t) T; |
||||||||||||||||||||||||||
|
Q |
|
|||||||||||||||||||||||||||||||||||
|
|
н |
|
|
|
|
|
|
|
x |
|
|
|
|
y |
|
|
|
|
z |
|
|
|
|
|
|
1ц |
|
|
2ц |
|
|
3ц |
|
|
||
|
|
(xц − xS )(yц −yS ) |
|||||
|
|
||||||
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(y |
−y |
)2 |
|
|
L |
= |
|
ц |
S |
|
|
+f |
|
|
|
|
||||
ц |
|
|
|
f |
|
|
|
|
|
|
|
xц − xS |
|||
|
|
|
|
||||
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− (xц − xS )2 −f f
− (xц − xS )(yц −yS ) f
0
yц −yS |
|
|
|
|
|
||
|
|
|
|
−(x |
− x |
|
, |
) |
|||
ц |
S |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
запишем систему уравнений (6) в следующей векторно-матричной форме
V (t) = Lц ×ω(t)−Q(t).
(7)
(8)
(9)
Отметим, что проведенные авторами исследования показали, что при всех физически возможных значениях величин xц, yц, xS, yS, f матрица Lц является неособенной, то есть det Lц ≠ 0. Это позволяет с учётом принятых обозначений (7), (8) представить векторно-матричное уравнение (9) в явном виде относительно вектора абсолютной угловой скорости:
ω(t) |
−1 |
|
|
|
|
(10) |
|
||||||
= Lц |
V (t)+Q(t) . |
|||||
Векторно-матричное уравнение (10) |
описывает |
модель |
определения абсолютных угло- |
|||
вых скоростей БСА и может быть решено на любой момент времени съемки t известными
методами численного интегрирования при заданных начальных условиях поступательного
(XS (t0 ), YS (t0), ZS (t0), XS (t0), YS (t0), ZS (t0)) и углового ωx (t0 ), ωy (t0 ), ωz (t0 ) движения линейки
45

известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
матриц ПЗС, где t0 — московское время включения БСА.
Уравнение (10) является определяющим в получении таких временных зависимостей угловых параметров съёмки, при которых величина сдвига изображения является допустимой. Поскольку система координат фоточувствительной поверхности в любых сканерных системах обычно выбирается таким образом, что xц= yц= xS= yS= 0, подставим эти соотношения в (6)–(10).
Тогда уравнение (10) примет следующий компактный вид:
|
ωx |
(t) |
|
|
|
b33(t) |
|
b12 |
|
|
|
|
|
(t) |
|
0 |
|
|
||
|
|
1 |
|
(t)X S |
(t)+b22 (t)YS |
(t)+b23(t)ZS |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
ωy (t) |
= |
|
|
−b33 |
(t) |
× b11 |
(t)X S |
(t)+b21 |
(t)YS |
(t)+b31 |
(t)ZS |
(t) |
|
− VH |
f . |
(11) |
|||
Zц |
|
|||||||||||||||||||
|
ω |
Z |
(t) |
|
(t)− ZS (t) b (t) |
b (t)X |
(t)+b (t)Y |
(t)+b (t)Z |
(t) |
|
0 |
|
|
|||||||
|
|
|
|
|
|
32 |
|
|
11 |
S |
21 |
S |
31 |
S |
|
|
|
|
|
|
Для моделирования процессов космической сканерной съёмки, кроме знания абсолютных
угловых скоростей, часто требуется знать зависимости от времени относительных угловых параметров съёмки α(t), β(t), χ(t), где α, β, χ — углы тангажа, крена и рысканья КА. Рассмотрим об-
щую процедуру формирования аналитических временных зависимостей ωx(t), ωy(t), ωz(t), и α(t), |
||||||||||||||||||||||||
β(t), χ(t), которая включает в себя пять этапов. |
|
β(t0 ), χ(t0) , XS (t0 ), YS (t0), ZS (t0), |
||||||||||||||||||||||
|
|
Этап1.Позаданнымначальнымусловиямсъемки α(t0 ), |
||||||||||||||||||||||
XS (t0), YS (t0), ZS (t0) , |
ϕ, ψ, η , H = Hср, x = y = xS = yS = 0 и, при необходимости, с использовани- |
|||||||||||||||||||||||
ем ЦМР района съёмки, в соответствии с приведенными в работе [2] формулами вычисляют- |
||||||||||||||||||||||||
ся элементы матрицы B(t0 ) = A3(t0 )A2 (t0 )A1 и значение Zц |
(t0 ) = Z(t0), которые подставляются в |
|||||||||||||||||||||||
первое уравнение системы (6) и находится VH. При этом полагают, что ωx=ωy=ωz |
=0. Далее вычис- |
|||||||||||||||||||||||
ленные значения B(t0 ) = A3 |
(t0 )A2 (t0 )A1 ; |
Zц |
(t0 ) = Z(t0) и найденное VH используются в уравнении |
|||||||||||||||||||||
(11) для нахождения составляющих ωx (t0), ωy (t0), ωz (t0). |
t |
формируются |
узловые |
точки |
||||||||||||||||||||
|
|
Этап |
2. |
После |
этого, на интервале съёмки |
|||||||||||||||||||
h = |
t/Δt , |
в |
|
которых |
определяются |
новые значения |
орбитальных параметров |
съёмки |
||||||||||||||||
X |
S |
(t |
h |
),hY (t |
h |
), Z |
S |
(t |
h |
), |
X (t |
h |
), |
Y (t |
h |
), Z |
(t |
h |
) , элементов матрицы B(t ) и значения Zц (th ) = Z(th ). |
|||||
|
|
|
S |
|
|
|
S |
|
S |
|
S |
|
|
h |
|
|
||||||||
Приэтомзначенияорбитальныхпараметровнаходятспомощьюсоответствующеймоделипосту-
пательного движения КА [7], а элементов матрицы B(th) — путем последовательного разложения
элементов матрицы в окрестности точки th–1 в ряд Тейлора по формуле B(th ) = B(th−1)+ B (th−1)∆th , где элементы матрицы B*(th–1) находятся из соотношения (4), приведенного в работе авторов
[1].
Этап 3. По найденным в узловых точках значениям орбитальных параметров, элементов
матрицы B(th) и Zц |
(th ) = Z(th ) в соответствии с системой уравнений (11) вычисляются значения |
||||
вектора ω(th ), в результате чего формируется множество его значений |
|
||||
|
{ |
0 |
1 |
h } |
(12) |
|
ω(t |
|
), ω(t ), ..., ω(t |
) . |
|
Этап 4. Располагая множеством значений абсолютных угловых скоростей (12), осуществляется их аппроксимация степенными полиномами по методу наименьших квадратов с использованием в качестве базисных функций многочленов Чебышева. В результате формируются искомые аналитические временные зависимости для составляющих вектора абсолютной угловой
скорости ωx(t), ωy(t), ωz(t). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Этап 5. Из приведенной в работе [2] формулы B(th ) = A3(th )A2 (th )A1 |
вытекает, что |
|
|||||||||||||||
|
(2) |
|
|
|
(2) |
|
|
|
(2) |
|
|
|
|
|
|
|
|
|
a11 |
(th ) |
a12 |
(th ) |
a13 |
(th ) |
|
T |
|
T |
|
||||||
A2 (th ) |
(2) |
(th ) |
(2) |
(th ) |
(2) |
(th ) |
|
|
(13) |
||||||||
= a21 |
a22 |
a23 |
= A3 |
(th )×B(th )× A1 (th ). |
|||||||||||||
|
a(2) |
(t |
h |
) |
a(2) |
(t |
h |
) |
a(2) |
(t |
h |
) |
|
|
|
|
|
|
31 |
|
|
32 |
|
|
33 |
|
|
|
|
|
|
|
|||
Основываясь на (13), в каждой узловой точке интервала съёмки после определения состав- |
|||||||||||||||||
ляющих вектора абсолютной угловой скорости ωx(t), ωy(t), ωz(t) вычисляются значения угловых |
||||||||||||||||||||||
параметров съёмки α(t ), β(t ), χ(t ) по формулам |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
h |
h |
h |
|
|
|
|
|
a(2) |
(t |
|
) |
|
|
|
a(2) |
(t |
|
) |
|
|
α(t |
|
) = −arcsina(2) |
(t |
|
); β(t |
|
) = −arctg |
h |
; χ(t |
|
) = −arctg |
h |
, |
(14) |
||||||||
h |
h |
h |
23 |
|
|
h |
12 |
|
|
|||||||||||||
a(2) |
(t |
|
) |
a(2) |
(t |
|
) |
|||||||||||||||
|
|
|
13 |
|
|
|
h |
|
|
h |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
33 |
|
|
|
|
|
11 |
|
|
|
|
||
после чего формируется множество значений {α(th), β(th), χ(th)}.
46

космическая съемка. аэрофотосъемка и фотограмметрия
Располагая множеством значений (14), так же, как и на этапе 4, осуществляется их аппроксимация степенными полиномами (ξ1, …, ξ9) по методу наименьших квадратов с использованием в качестве базисных функций многочленов Чебышева. Проведенные авторами исследования показали, что для обеспечения заданной точности определения текущих значений угловых параметров съемки, достаточно ограничиться выбором третьей степени полиномов. С учетом изложенного модель формирования угловых параметров съемки в матричной форме будет иметь следующий вид:
|
|
|
ξ |
ξ |
|
ξ |
|
|
|
|
|
|
|
|
|
|
|
(α(t),β(t),χ(t)) |
T |
|
|
1 |
|
2 |
|
3 |
|
(t |
0 |
1 |
,t |
2 |
) |
T |
, |
|
= ξ4 |
ξ5 |
ξ6 |
|
,t |
|
|
||||||||||
|
|
ξ |
7 |
ξ |
8 |
ξ |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где ξ1, …, ξ9 — коэффициенты полиномов, аппроксимирующих на интервале съёмки угловое движение КА.
Работа выполнена в рамках ФЦП «Научные и научно-педагогические кадры инновационной России на период 2009–2013 гг.» в ходе НИР по проекту №2216 от 11.11.2009 г.
ЛИТЕРАТУРА
1.Андронов В.Г., Клочков И.А., Лазарева Е.В., Мордавченко Т.В. Общая модель скорости движения космических сканерных изображений в инерциальном пространстве // Изв. вузов. «Геодезия и аэрофотосъёмка». 2010. –№4. –С. 58–61.
2.Андронов В.Г., Клочков И.А. Фотограмметрическая модель космических сканерных изображений // Изв.вузов. «Геодезия и
аэрофотосъёмка». 2010. –№2. –С. 56–63.
3.H.S. Bowen / Absolute Radiometric Calibration of the Ikonos Sensor Using Radiometrically Characterized Stellar Sources / Pecora 15/Land Satellite Information IV Conference, ISPRS Commission I Mid-term Symposium/FIEOS (Future Intelligent Earth Observing Satellites), Nov. 10–14, 2002, Denver, CO.
4.БутыринС.А. Кинематический синтез программного углового движения космического аппарата при оптико-электронной съемке Земли // Известия Самарского научного центра РАН. –2007. –Т. 9.
5.Бутырин С.А. Оптимизация сканирующей оптико-электронной съемки Земли из космоса / С. А. Бутырин, А. В. Бутко//.
Вестник Самарского государственного технического университета. Сер. Технические науки. –2008. –№ 2. –С. 68–72.
6.Андронов В.Г., Дегтярёв С.В., Клочков И.А. Особенности формирования космических сканерных изображений линейками матриц ПЗС // Информационно-измерительные и управляющие системы. М.: Радиотехника, 2010. –№ 7. –Т.8. –С. 11–15.
7.Основы теории полета космических аппаратов / Под ред. Г.С. Нариманова и М.К. Тихонравова. М.: Машиностроение, 1972. –374 c.
Поступила 12 апреля 2010 г. Рекомендована кафедрой телекоммуникаций ЮЗГУ
ИСПОЛЬЗОВАНИЕ МОДУЛЯ MODELER ПРОГРАММЫ ERDAS IMAGINE 9.2 ДЛЯ АВТОМАТИЗАЦИИ ПРОЦЕССА ДЕШИФРИРОВАНИЯ ОБЪЕКТОВ НА ОСНОВЕ НЕЛИНЕЙНЫХ СПЕКТРАЛЬНЫХ ПРИЗНАКОВ
Профессор, кандидат физ.-мат. наук Т.В. Феофилактова, аспирант М.В. Борисова
Московский государственный университет геодезии и картографии
E-mail: OmashaO@inbox.ru
Аннотация.Использование модуля Modeler программного комплекса ERDAS Imagine для автоматизации процесса дешифрирования природных и антропогенных объектов на основе многозональных космических изображений с использованием нелинейных спектральных признаков. В статье содержится описание предлагаемого алгоритма и его реализация стандартными средствами одного из наиболее популярных программных продуктов для обработки данных ДЗЗ ERDAS Imagine.
Ключевые слова: космические снимки, дешифрирование
Abstract. Using Modeler module of ERDAS Imagine program complex for computerization of natural and anthropogenic objects interpretation process based on multispectral space images using non-linear attributes is described. Proposed algorithm and its implementation by means of standard tools of ERDAS Imaging which is one of the most popular software products for ERS data processing are declared.
Keywords: satellite imagery, interpretation
Наиболее трудоемким процессом обработ- |
можно назвать процессы тематической обра- |
ки результатов космических съемок по праву |
ботки. Традиционно данные процессы опира- |
47
известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
ются на визуально инструментальные методы |
Как правило, обработчик не является |
и не проходят без участия человека. Что делает |
программистом и не знаком с языками про- |
их весьма субъективными и напрямую зави- |
граммирования высокого уровня, что полно- |
сящими от уровня подготовленности и опыта |
стью лишает его возможности автоматизации |
специалиста. Кроме того, процесс дешифриро- |
какого-либопроцессасамостоятельно.Именно |
вания занимает достаточно много времени. |
для этих целей в программном комплексе |
Однако, применение автоматических ме- |
ERDAS Imagine существует специальный мо- |
тодов обработки , позволяет сделать процесс |
дуль Modeler. Данный модуль представляет |
дешифрирования существенно более эффек- |
собой набор нехитрых инструментов и вьювер |
тивным. |
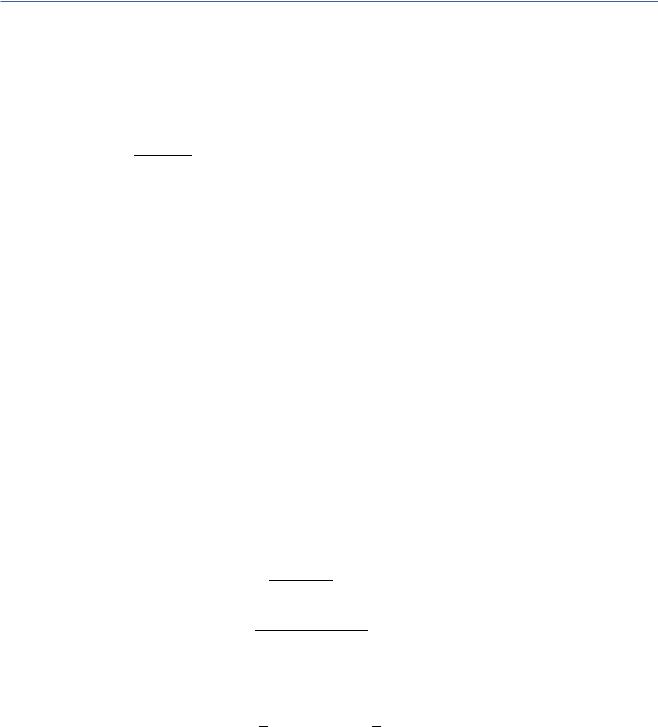
для составления блок-схем (рис. 1). |
В настоящее время, накоплен большой |
По средствам стандартных инструментов |
опыт автоматической обработки и анализа |
на панели Tools вы конструируете необходи- |
цифровых изображений. Часть этих методов |
мый алгоритм, и на основе созданной блок схе- |
реализована и спешно применяется в процессе |
мынаязыкеJavaформируетсяскриптстекстом |
интерактивного дешифрирования аэрокосми- |
заложенного вами алгоритма. Обработчику |
ческой информации с использованием совре- |
остается только открыть нужный ему алго- |
менных пакетов по обработке растровой ин- |
ритм, указать исходные данные и запустить |
формации, таких как ERDAS Imagine, ENVI, |
на выполнение. Единственным условием, как |
PSI Geomatica и др. Но главной же задачей в |
и в большинстве случаев работы со скрипта- |
этом направление является осуществление |
ми, является сохранение файловой структуры |
полностью автоматического процесса дешиф- |
данных. Потому как, пути которые прописаны |
рирования. |
в созданном вами блок-схеме, являются абсо- |
|
лютными и при несовпадении заданного пути |
|
к нужному файлу программа выдаст вам со- |
|
общение об ошибке. |
|
На основе системы нелинейных спектраль- |
|
ных признаков [1] был разработан алгоритм |
|
автоматизированного дешифрирования много- |
|
зональных космических изображений на базе |
|
изображений с КА Landsat. Рассмотрим реализа- |
|
цию данного алгоритма в данном программном |
|
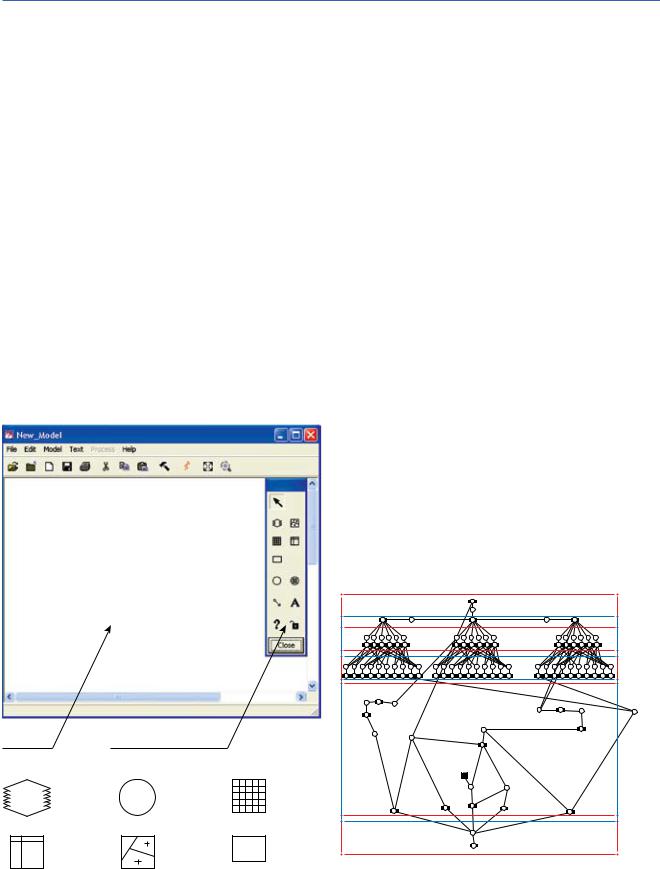
модуле программного пакета ERDAS (рис. 2). |
Этап 1 |
Этап 2 |
Этап 3 |
Вьювер |
Панель инструментов |
|
Этап 4 |
|
|
|
|
Растр |
Функции |
Матрица |
|
|
|
|
Этап 5 |
Таблица |
Вектор |
Скаляр |
|
Рис. 1. Интерфейс модуля Modeler программного |
Рис. 2. Общая схема процесса распознавания при- |
||
родных и антропогенных объектов на базе результа- |
|||
пакета ERDAS Imagine |
|
тов космических съемок с КА Landsat–7 (ETM+) |
|
48

космическая съемка. аэрофотосъемка и фотограмметрия
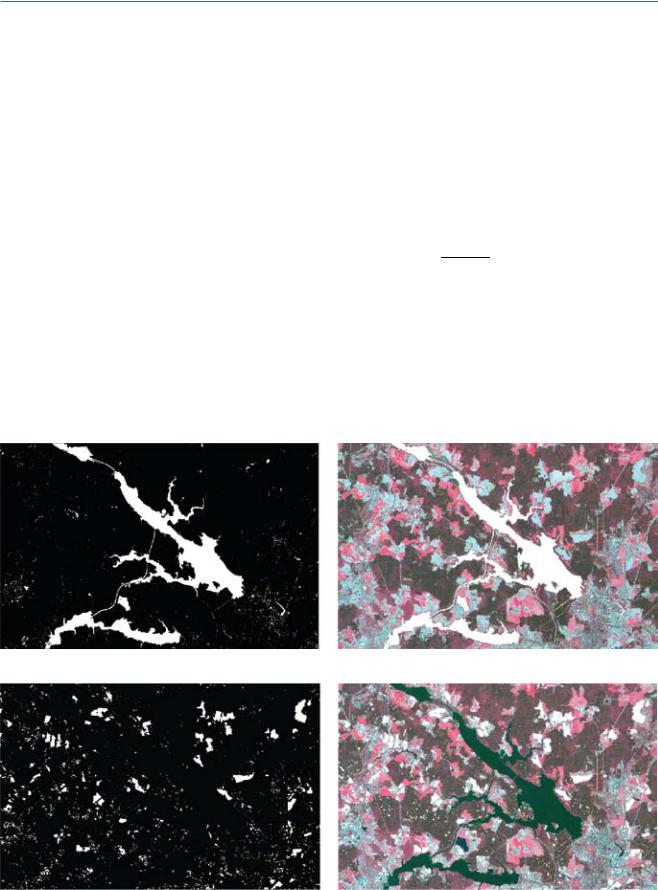
Весь алгоритм разделен на 5 этапов. Рассмотрим каждый из этапов более подробно на примере обработки многозонального космического изображения с КА Landsat 7 (рис. 3).
Этап 1. Ввод исходных данных, их последующаянормировкаиделениепоканалам.На данномэтапеотпользователятребуетсяуказать исходное многозональное изображение (КА Landsat). После чего программа сама выполнит нормировку указанного изображения и сформирует на его основе три независимых друг от другаизображенияпредставляющиесобойпервые четыре канала исходного нормированного изображения — набор L2 (рис. 4, а), последние четыре канала исходного нормированного изображения — набор L3 (рис. 4, в) и все шесть каналов целиком — набор L1 (рис. 4, б).
Следует отметить, что данные полученные на каждом из этапов являются данными для всех последующих этапов.
Этап 2. Расчет вспомогательных пара-
метров. На основе полученных на предыдущем этапе данных выполняется построение ряда вспомогательных изображений, которые будут участвовать в создании изображений на основе нелинейных спектральных признаков, а именно:
n
L = ∑ [(Ri − Ri+1)2 +(λi −λi+1)2 ];
[(Ri − Ri+1)2 +(λi −λi+1)2 ];
i=1
n
S = ∑[(Ri − Ri+1)2 +(λi −λi+1)2 ];
i=1
n |
|
(λi −λi+1) (Ri |
2 |
+ Ri Ri+1 |
2 |
|
|
; |
Jλ = ∑ |
|
+ Ri+1) |
|
|||||
i=1 |
|
|
6 |
|
|
|
|
|
n |
|
2 |
|
|
2 |
|
, |
|
JR = ∑ |
(Ri − Ri+1)(λi |
+λiλi+1 +λi+1) |
|
|
||||
i=1 |
|
|
6 |
|
|
|
|
|
гдеS —площадьспектральногомногоугольни-
Рис. 3. Исходное многозональное изображение с КА Landsat–7 (ETM+)
ка; L — периметр спектрального многоугольника; Jλ — статистический момент инерции многоугольника, относительно оси λ; JR — статистический момент инерции многоугольника, относительно оси R; n — число вершин спектрального многоугольника; R— нормированный спектральный коэффициент яркости.
Этап3.Расчетизображенийнаосновенелинейных спектральных признаков для каждого из трех изображений. На данном этапе выполняется построение десяти изображений на основе нелинейных спектральных признаков для каждого из трех исходных изображений. Формулы расчета которых приведены ниже:
|
|
|
R R |
|
|
|
|
R |
|
|
|
|
|
|
|
J |
R |
|
2 |
|
|
|
|
J |
λ |
2 |
|
|
L2 |
||||||||
P |
= |
|
|
w o |
; P |
= |
|
|
w |
; |
P |
= |
|
|
|
|
|
+ |
|
|
|
|
; P |
= |
|
; |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
1 |
|
|
|
|
S |
|
2 |
|
|
R0 |
|
3 |
|
|
|
S |
|
|
|
|
S |
4 |
|
S |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
P |
= |
|
Rw |
; P |
= |
|
Ro |
|
; P |
= |
|
JR |
; P |
= |
|
|
|
|
JR |
|
; |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
5 |
|
|
|
L |
6 |
|
|
L |
|
7 |
|
|
|
Jλ |
|
|
8 |
|
|
|
|
JR2 + Jλ2 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
Jλ |
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
P |
= |
|
|
|
|
|
|
; P |
|
(Rw + Ro )L |
, |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
9 |
|
|
|
|
JR2 + Jλ2 |
|
|
10 |
|
|
|
|
|
2S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где R0 — радиус вписанной окружности (или
a |
б |
в |
Рис. 4. Группа изображений, полученных на первом этапе (нормированные изображения: a — набор L2; б — набор L1; в — набор L3)
49
известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
меньшая сторона минимального по площади прямоугольника); Rw — радиус описанной окружности (или большая сторона минимального по площади прямоугольника).
Этап 4. Расчет масок объектов. В пред-
лагаемом алгоритме реализованы процедуры выделения пятиклассов объектов.Рассмотрим каждый из них более подробно.
Гидрогафия (obj_1) (рис. 5)
obj _1= Step(P1(4k _2))− Step(P8(4k _1)), [2]
где Step — функция перевода изображения в тематические (присвоении всем отрицательным значениям на изображении 0, а всем положительным 1); P1(4k _2) — признак P1 для последних четырех каналов съемки — набор
L3; P8(4k _1)— признак P8 для первых четырех каналов съемки L2.
Пустыри (obj_2) (рис. 6)
obj _2 = Min(B−obj _1);
B = Step(−NDVI(A));
A = Step(S(4k _2))img,
где S(4k _2) — изображение площади, полученное на втором этапе работы алгоритма для последних четырех каналов съемки — набор L3; img — исходное многозональное изображение с КА Landsat; Min — минимизирующий фильтр (стандартное средство оконной обработки программного пакета ERDAS Imagine)
Антропогенные объекты (obj_3) (рис. 7) obj _3= B−obj _1−obj _2 .
Низкорослая растительность (obj_4) (рис. 8)
obj _4 =1 if R4∆λ− R3 > 13(Max(R)− Min(R)).
Лес (obj_5) (рис. 9)
obj _5 = NDVI −obj _4−obj _3.
Этап 5. Формирование единого растро-
вого изображения. Заключительный этап — это оформление результатов классификации. Программа выполняет объединение полученных масок объектов на предыдущем этапе и
Рис. 5. Результат выделения объектов гидрографии
Рис.6. Результат выделения объектов почвы
50