

Известия вузов Геодезия и аэрофтосъемка №6
.pdfгеодезическое приборостроение
(рыскание) считается положительным при повороте с севера на восток, дифферент (килевая качка) положителен когда нос корабля поднят вверх относительно плоскости OXZ, крен (бортовая качка) — при повороте в сторону правого борта. Отсчёты углов оси А1 возрастают при повороте вращающейся части в сторону правого борта корабля. Отсчёты углов по оси А2 положительны при повороте оптических осей телескопов от нулевого значения угла через зенит в направлении от носа к корме корабля. Диапазон предельных углов поворота:
по оси А1 …………±100°; по оси А2 …………от +95 до –70°.
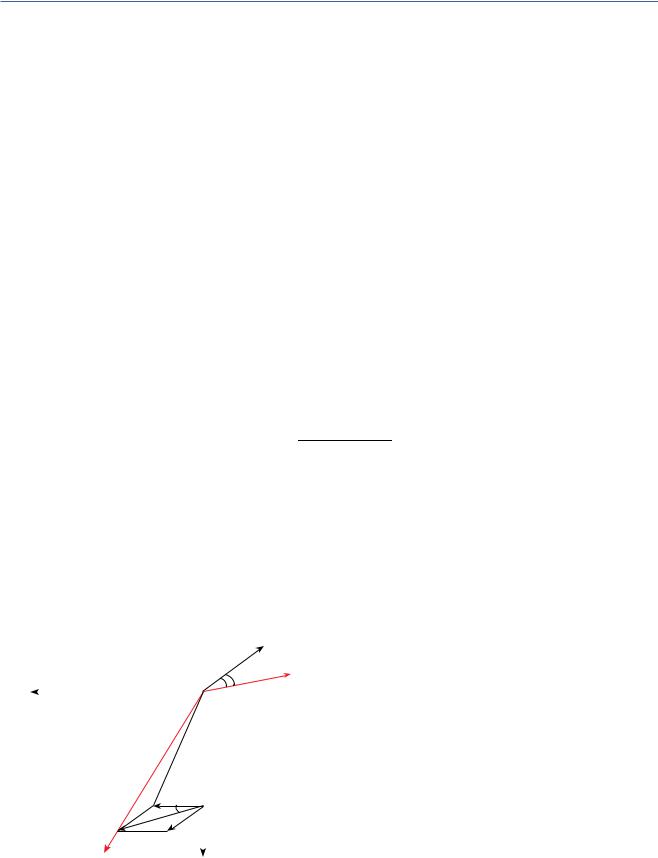
Биения оси А1. Рассмотрим влияние угловых биений оси А1 на измерения. Биения будем задавать в общем виде, т.е. ось А1 может быть смещенавлюбойплоскости,проходящейчерез её идеальное положение. Эта погрешность может быть выражена через два последовательных поворота вокруг оси Y′ и Z″ (рис. 3), т.е.
матричное преобразование TZ′′(ε1) TY ′(ε2). Далее вокруг полученных смещённых осей монтировки осуществляются повороты на углы α1 и α2, что записывается следующим образом:
|
Y'(ИСКМ) |
|
|
|
|
|
||
|
|
|
Y1(ВСК) |
|
|
|
|
|
|
|
30o |
(ПСКМ) |
|
Z1(Z') |
|||
|
X2 |
|
|
|||||
|
|
Y2 |
|
|
|
|
|
|
X1 |
αZ |
|
|
|
|
XОi YОi(СКО) |
||
|
|
αZ Z (A ) |
||||||
X'(A1) |
|
Ц |
αX |
2 |
2 |
|
|
ZОi |
|
1 |
|
|
|
|
|||
αX |
|
|
|
ЦОi |
||||
|
|
|
|
|
|
|
||
Х
ХО
45
3
A2(Z2) |
6 |
2
1 
30° A1(X')
7
Направление на нос корабля
Рис. 1. Опорно-поворотное устройство (ОПУ) оптического комплекса:
1 — основание; 2 — двигатели моментные; 3 — оптический блок ОБ2; 4 — датчики угловые;
5 — объективы; 6 — оптический блок ОБ1; 7 — опорный блок
YО
Y
ZО(КСК)
 Z(МСК)
Z(МСК)
ЦО,Ц
Рис.2. Системы координат корабля
91
известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
X ′
TZ * (α2)TX ′′(α1)TZ ′′(ε1)TY ′(ε2) Y′ = Aнепр , (1)
Z′
где Z* — ось, полученная поворотом оси Z″ вокруг X″ на угол α1; Aнепр — вектор координат «неправильного» направления с учётом биений.
0
Далее, задавая Aнепр единичным и равным 1 , т.е. определяющим оптическую ось объекти-
0
ва, из (1) получим:
X
Y
Z
′
′ = TZ * (α2)TX ′′(α1)TZ ′′(ε1)TY ′(ε2) −1 Aнепр. (2) ′
Из выражения (2) для координат X′, Y′, Z′ легко получить тангенс угла поворота вокруг оси А1 с учётом введённых погрешностей биения:
tg(α1 + ∆α1) = Z′′(α1,α2,ε1,ε2),
Y (α1,α2,ε1,ε2 )
где Δα1 — погрешность поворота вокруг оси А1, вызванная её угловыми биениями.
С другой стороны, данный тангенс по известной формуле тангенса суммы углов можно за-
писать следующим образом: tg(α1 + ∆α1) = tgα1 + tg∆α1 ,т.е. получаем уравнение: 1− tgα1 tg∆α1
|
tgα1 + tg∆α1 = |
Z′(α1,α2,ε1,ε2 ). |
|
|
1− tgα1 tg∆α1 |
|
Y′(α1,α2,ε1,ε2) |
Далее осуществлялись тригонометрические преобразования данного уравнения, где кро-
ме всего прочего учитывалось, что ввиду малости углов ε1, ε2 выполняются равенства cos ε1 ≈ 1; |
|||||||||||||||||||||
cos ε2 ≈ 1; sin ε1≈ tg ε1 ≈ ε; sin ε2≈ tg ε2 ≈ ε. В итоге была получена следующая формула для Δα1: |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
ε1 tgα1 tgα2 +ε2 tgα2 +ε1ε2 cosα1 |
(3) |
||||||||||||
|
|
|
tg∆α1 = |
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||
ε |
|
tgα tgα |
|
−ε tgα |
|
+ |
|
1 |
|
+ε ε |
sinα |
||||||||||
|
|
|
cosα |
|
|
||||||||||||||||
|
|
|
|
|
|
|
2 |
1 |
2 |
|
1 |
|
2 |
|
1 2 |
1 |
|
|
|||
|
|
|
|
|
|
|
|
Z' |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Также, учитывая (2), можно записать выра- |
||||||||
|
|
|
|
|
|
|
|
ε2 |
Z" |
|
жение для синуса угла поворота вокруг оси А2 |
||||||||||
Y' |
|
|
|
|
O |
|
|
|
|
с учётом введённых биений: |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
sin(α2 + ∆α2 ) = −X ′(α1,α2,ε1,ε2 ), |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
где Δα2 |
— погрешность поворота вокруг оси А2, |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
вызванная угловыми биениями оси А1. |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Откуда после тригонометрических преоб- |
|||||||
|
|
|
θε1 |
|
|
|
|
|
|
|
|
разований и, учитывая, что |
|
||||||||
|
|
|
1 |
|
|
|
|
|
|
|
sin(α2 + ∆α2 ) = sinα2 cos∆α2 +cosα2 sin∆α2 |
≈ |
|||||||||
|
|
εA1 |
ε2 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
≈ sinα2 +cosα2∆α2, |
|
|||||
|
X" |
|
|
|
|
|
|
|
|
получим: |
|
|
|||||||||
|
X'(A1) |
|
|
|
|
∆α2 = ε1 cosα1 −ε2 sinα1. |
(4) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Рис. 3. Биения оси А1 |
|
|
|
|
|
|
|
|
|
|
||||||||||
(ось А1 для наглядности направлена вниз) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
92
геодезическое приборостроение
Отдельные ортогональные составляющие биения ε1 и ε2 можно задать через амплитуду биения оси А1 — εA1 и угол биения θ1 относительно вертикальной плоскости OX′Y′:
|
|
|
|
ε1 |
= εA cosθ1; ε2 |
= εA |
sinθ1. |
|
|
|
|
|
|
|
|
|
|
(5) |
||||||
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя (5) в (3) имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
ε2 |
cosθ sinθ cosα +ε |
A |
cosθ tgα tgα |
2 |
+ε |
A |
sinθ tgα |
2 |
|
|
||||||||||||
tg∆α1 = |
|
A |
|
1 |
1 |
1 |
|
|
1 |
|
1 |
|
|
|
|
1 |
|
|
. |
(6) |
||||
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||
ε2 |
cos |
θ sinθ sinα +ε |
A |
sinθ tgα tgα |
2 |
−ε |
A |
cosθ tgα |
2 |
+ |
|
1 |
||||||||||||
|
|
|
|
|||||||||||||||||||||
|
A |
|
1 |
1 |
1 |
|
|
1 |
1 |
|
|
|
|
1 |
|
cosα1 |
|
|||||||
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
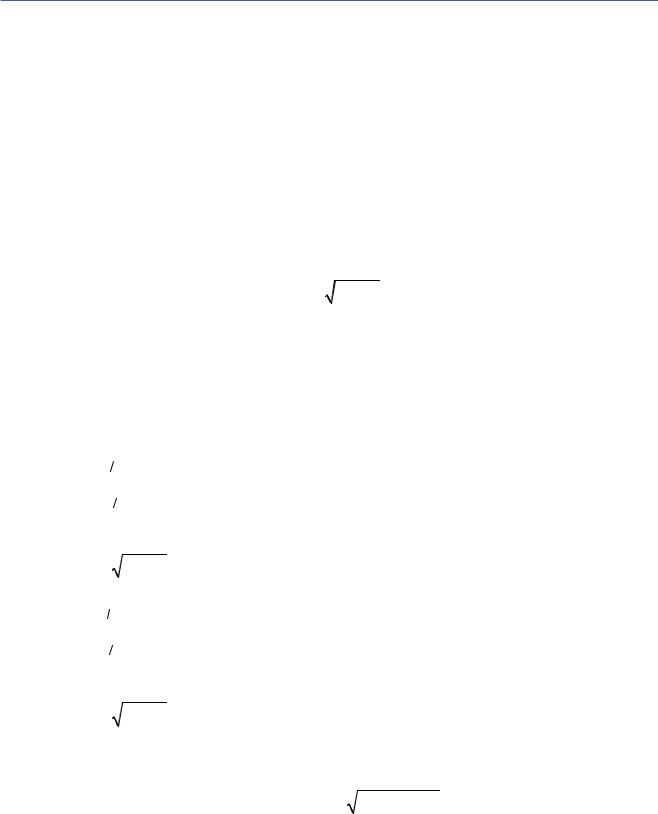
Определим теперь математическое ожидание и дисперсию погрешности Δα1, вызванной биением оси А1.
Известно [2, 3], что угловое биение ε, вызванное эксцентриситетом, подчиняется арксинусоидальному закону распределения вероятностей (рис. 4):
p(ε) = |
1 |
|
|
, |
|
|
|
|
|
||
π ε2 |
−ε2 |
||||
|
|
m |
|
|
|
где εm — амплитуда углового биения; p(ε) — плотность вероятности.
Значение угла биения θ1 относительно вертикальной плоскости OX′Y′ в (5) может принимать любое значение от –π/2 до π/2 и для распределения вероятностей угла θ1 выберем равномерный закон.
Таким образом, (6) представляет собой функцию случайных величин с известными законами распределения вероятностей, поэтому можно записать следующие выражения для математического ожидания и дисперсии погрешности Δα1 вследствие биения оси А1:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
π 2 |
εm |
|
|
|
|
|
|
ε |
2 |
cosθ1 sinθ1 cosα1 +εcosθ1 tgα1 tgα2 |
+εsinθ1 tgα2 |
|
|
|
|
|
|||||||||||||
M1(1) (α1 |
,α2 ) = |
∫ |
∫ |
1 arctg |
|
|
|
|
|
|
|
|
|
× |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
π |
|
|
2 |
cosθ1 sinθ1 sinα1 +εsinθ1 tgα1 tgα2 −εcosθ1 tgα2 + |
|
|
1 |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
−π 2 −εm |
|
|
ε |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
cosα |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||
|
|
|
× |
|
1 |
|
|
dεdθ1 |
|
≈ 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
π |
ε2 |
−ε2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
||
|
|
|
|
π 2 |
εm |
1 |
|
|
|
|
|
ε2 cosθ |
sinθ |
cosα +εcosθ |
tgα |
tgα |
2 |
+εsinθ |
tgα |
2 |
|
|
|
|
|
|
|||||||
D(1) (α ,α ) = |
∫ |
∫ |
arctg |
|
|
|
|
|
|
1 |
1 |
1 |
1 |
1 |
|
1 |
|
|
|
|
|
|
|
|
× |
||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||||||||||
1 |
1 |
2 |
|
π |
|
|
|
cosθ1 sinθ1 sinα1 +εsinθ1 tgα1 tgα2 −εcosθ1 tgα2 + |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
−π 2 −εm |
|
|
ε |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
cos |
α |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||||
|
|
|
× |
|
1 |
|
|
dεdθ1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
π |
ε2 |
−ε2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь в обозначениях M(1) |
|
и D(1) нижний индекс показывает вокруг какой оси рассматрива- |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ется погрешность поворота, а верхний индекс показывает биения какой оси вызвали эту погреш-
ность. Значение εm в расчётах принималось равным 6″. На рис. 5 представлен график среднего
квадратического отклонения (СКО) σ1(1) (α1,α2)= D1(1)(α1,α2).
Следует отметить, что в (7) в большинстве случаев функцию арктангенса можно заменить её аргументом, т.к. такая замена начинает влиять на точность вычислений только при углах α2, близких к 90°. Кроме того, точное выражение для погрешности, которое следует из (6) — ∆α1 = arctg(tg∆α1)+ πk, где k — целое число и при наблюдении вблизи этой области 90° (направления оси А1) погрешность может быть равной ∆α1 = arctg(tg∆α1)+ π, когда координаты Y′
93
известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
p(ε) |
|
|
σ1(1)," |
30 |
|
|
2×105 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
5×105 |
|
|
|
10 |
α2,º |
50 |
|
|
|
|
-50 |
0 |
|
|
|
|
-100 |
|
|
|
1×105 |
|
|
|
-50 |
|
|
|
|
|
|
|
|
|
5×104 |
|
|
α1,º 0 |
|
|
|
|
|
|
|
50 |
|
|
0 |
|
|
|
|
|
|
–2×10–5 |
0 |
2×10–5 ε, радиан |
|
100 |
|
|
Рис. 4. Арксинусоидальный закон распределения |
|
Рис. 5. График СКО σ1(1)(α1, α2) |
||||
|
биения оси ОПУ |
|
|
|
|
|
и X′ одновременно меняют знаки (рис. 6). Причём добавление π влияет только на математическое ожидание, дисперсия остаётся неизменной.
Теперь запишем выражения для погрешности Δα2 поворота вокруг оси А2, вызванной угловыми биениями оси А1, используя (4), (5):
M |
(1) |
(α ,α |
|
)= π/2 εm |
1 (εcosθ |
cosα −εsinθ sinα |
) |
1 |
|
|
dεdθ = 0; |
|
||||||||
2 |
2 |
|
|
|
|
|
||||||||||||||
|
1 |
|
|
∫ |
∫ |
π |
1 |
1 |
1 |
1 |
|
|
π εm2 |
−ε2 |
1 |
|
||||
|
|
|
|
|
−π 2 −εm |
|
|
|
|
|
|
|
|
|||||||
D2(1) (α1) = |
π/2 |
εm |
1 |
(εcosθ1 cosα1 −εsinθ1 sinα1 )2 |
|
|
|
1 |
|
|
dεdθ1. |
(8) |
||||||||
|
∫ |
∫ |
|
|
|
|
|
|||||||||||||
|
π |
|
|
|
|
|
|
|||||||||||||
|
π ε2m −ε2 |
|||||||||||||||||||
|
|
−π 2 −εm |
|
|
|
|
|
|
|
|
|
|||||||||
Интеграл (8) можно вычислить аналитически — после преобразований получаем, что это
постоянная величина, равная D2(1) = |
ε2 |
m . |
|
|
4 |
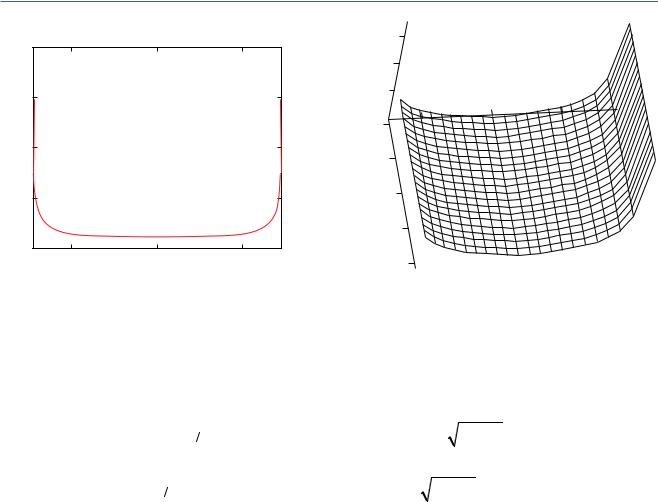
Биения оси А2. Далее рассмотрим биения оси А2 (рис. 7). Аналогично предыдущему случаю, за- |
||||||||||||||
пишем координаты направления смещённой оптической оси в ИСКМ через матрицы поворотов: |
|
|||||||||||||
|
|
X ′ |
|
|
|
|
|
|
|
0 |
|
|||
|
|
|
Y′ |
= TZ * (α2)TY ′′(ε4)TX ′(α1 +ε3) −1 |
|
1 |
. |
(9) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
Z′ |
|
|
|
|
|
|
|
|
|
|
|
Из уравнения (9) после преобразований получаем: |
|
|
|
|
||||||||||
|
|
|
|
|
tg∆α1 = |
ε3 +ε4 tgα2 |
|
|
|
|
|
(10) |
||
|
|
|
|
|
1−ε3ε4 tgα2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
и Δα |
= 0. Далее, т.к. ε3 |
= εA cosθ2 |
, ε4 |
= εA |
sinθ2, из (10) следует: |
|
|
|
|
|||||
2 |
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
tg∆α = |
εA |
cosθ2 +εA sinθ2 tgα2 |
, |
|
|
(11) |
|||||
|
|
|
2 |
|
2 |
|
|
|
|
|||||
|
|
|
1−ε2A |
cosθ2 sinθ2 tgα2 |
|
|
||||||||
|
|
|
|
1 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
где εA2 — амплитуда биения оси А2; θ2 — угол биения оси А2 относительно плоскости, проходящей через идеальные исходные (нулевые) положения А2 и оптической оси.
Из (11) получаем следующие выражения для математического ожидания и дисперсии Δα1:
94
геодезическое приборостроение
Y' |
Z' |
|
 θ2ε3
θ2ε3
ε4 εA2 Z*
Δα |
|
Z' |
|
Y" |
|
1 |
|
|
|
||
X'(A1) |
|
|
|
ε3 |
|
|
|
|
|
O |
|
|
|
|
Y' |
|
|
|
|
|
|
|
 X'(A1)
X'(A1)
Рис. 6. ПогрешностьΔα1 иΔα1+π
(2) |
|
π/2 |
εm |
|
1 |
|
εA2 |
cosθ2 +εA2 |
sinθ2 tgα2 |
||||||||||||||
M1 |
|
(α2)= |
∫ |
|
∫ |
|
|
arctg |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
π |
1−ε |
2 |
cosθ |
|
|
sinθ |
|
|
tgα |
|
|
|||||||||
|
|
|
−π 2 −ε |
m |
|
A2 |
2 |
2 |
2 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
(2) |
(α2)= |
π/2 |
εm |
|
1 |
|
εA2 |
cosθ2 +εA2 |
sinθ2 tgα2 |
||||||||||||||
D1 |
∫ |
∫ |
|
|
arctg |
1−ε |
2 |
cosθ |
|
sinθ |
|
tgα |
|
||||||||||
|
|
−π 2 −ε |
m |
π |
|
A2 |
2 |
2 |
2 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Рис. 7. Биения оси А2
|
1 |
|
|
|
|
|
|
||||
|
|
|
|
|
dεA dθ2 = 0; |
||||||
|
|
|
|
|
|
|
|||||
2 |
|
2 |
|
||||||||
|
|
|
|
|
2 |
||||||
π |
|
εm −εA2 |
|
|
|
||||||
|
|
|
|
|
|
||||||
2 |
1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
dεA dθ2. |
||
|
|
|
|
|
|
|
|
||||
2 |
|
2 |
|||||||||
|
− |
2 |
|||||||||
|
π εm |
εA |
|||||||||
|
|
||||||||||
|
|
|
|
|
|
2 |
|
|
|||
Неперпендикулярность осей А1 и А2. Влияние неперпендикулярности (рис. 8) на направление оптической оси аналитически выражается в виде такого уравнения:
XYZ
′ |
|
|
0 |
|
|
|
|
′ |
= TZ * (α2)TY" (i)TX ′(α1) −1 |
|
1 |
|
, |
(12) |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
′ |
|
|
|
|
|
|
|
где Y″, Z″ — оси, полученные поворотом соответственно Y′, Z′ на угол α1; Z*— получена поворотом Z″ вокруг Y″ на угол i вследствие неперпендикулярности осей.
Из (12) после преобразований выводим известные формулы [2]:
tg∆α1 = i tgα2, ∆α2 = 0. |
(13) |
Формулу (13) также можно получить как частный случай (10) при ε3= 0, т.е. неперпендикулярность оказывает такое же действие как биение в плоскости осей А1 и А2.
Примем распределение вероятностей неперпендикулярности нормальным. Тогда математическое ожидание и дисперсия погрешности Δα1 вследствие неперпендикулярности следующие:
M1(i
D1(i)
|
|
1 |
|
∞ |
|
2 |
|
|
|
|
|
||||
) (α2)= |
|
|
∫ arctg(itgα2 )exp |
−i |
di = 0; |
||
|
|
|
2D |
||||
2πD |
|||||||
|
|
i −∞ |
|
i |
|||
(α |
)= |
|
1 |
∞ |
arctg(itgα |
) 2 exp |
|
−i2 |
di. |
|
|
∫ |
|
2D |
|||||
2 |
|
|
2πD |
( |
2 ) |
|
|||
|
|
|
i −∞ |
|
|
|
i |
||
При углах, не приближающихся к области 90°, дисперсию этой погрешности можно считать по формуле
D1(i) (α2)=(tgα2 )2 Di . |
(14) |
Так, в расчётах максимальная неперпендикулярность принималась равной 15″. Известно, что тангенс угла π/6 отличается от значения дуги угла в радианах на 9,3%. Тогда если приравнять
95

известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
Y" |
|
Z* |
Y2 |
|
Y* |
|
|
|
|||
|
|
Z" |
|
|
|
|
|
|
|
|
|
|
|
-i |
|
|
|
|
|
O |
|
|
|
|
|
|
c |
|
|
|
|
|
X2 |
|
|
|
|
-i |
|
|
|
|
|
|
|
|
Z2(A2) |
|
|
|
|
c |
Z* |
X'(A1) |
|
X* |
O |
|
|
|
|
|
|||
|
|
|
|||
Рис. 8. Неперпендикулярность осей монтировки |
Рис. 9. Коллимационная погрешность |
||||
(15′′ 5 10−6 )tgα2 = π 6, то α2= 89,992°, т.е. в пределах до 89,992° можно считать, что формулы Δα1= i tg α2 и (14) верны с погрешностью около 9,3%.
Коллимационная погрешность. Влияние коллимационной погрешности (неперпендикулярности оптической оси и оси А2) на итоговую погрешность измерения выражается следующим образом (рис. 9):
X ′ |
|
|
|
|
|
|
0 |
|
|
||
Y′ |
= TX |
(c)TZ (α2)TX ′(α1) −1 |
|
1 |
. |
(15) |
|||||
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
Z′ |
|
|
|
|
|
|
|
|
|
|
Из (15) после преобразований получаем известные формулы [2]: |
|
||||||||||
|
|
tg∆α = |
c |
, ∆α |
|
= 0. |
|
|
|
(16) |
|
|
|
cosα2 |
|
|
|
|
|||||
|
|
|
1 |
|
2 |
|
|
|
|
|
|
Принимая распределение вероятностей коллимационной погрешности также нормальным, запишем формулы для математического ожидания и дисперсии погрешности Δα1:
(c) |
(α2)= |
1 |
|
|
∞ |
|
|
c |
|
|
|
|
|
−c2 |
|
|
|
|
|||||||||
M1 |
|
|
|
|
|
∫ arctg |
|
|
|
|
exp |
|
dc = 0; |
||||||||||||||
|
|
|
|
|
cosα |
|
|
|
2D |
||||||||||||||||||
|
|
2πD |
2 |
|
|||||||||||||||||||||||
|
|
|
|
|
|
c −∞ |
|
|
|
|
|
|
|
|
c |
|
|
|
|
||||||||
D(c) (α |
)= |
|
1 |
|
|
∞ |
|
|
c |
|
|
|
|
2 |
|
|
|
−c |
2 |
|
|
||||||
|
|
|
∫ |
arctg |
|
|
|
|
|
|
|
exp |
|
|
|
dc. |
|||||||||||
|
|
|
|
|
|
cosα |
|
|
|
|
2D |
|
|||||||||||||||
1 |
2 |
|
|
|
2πD |
|
|
|
2 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
c |
−∞ |
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
||||||
При углах, не приближающихся к области 90°, дисперсию этой погрешности допускается
считать по формуле |
|
|
|
2 |
|
|
D(c) (α |
)= |
|
1 |
D . |
(17) |
|
|
|
|
||||
1 2 |
|
|
c |
|
||
|
|
cosα2 |
|
|
|
|
Так же, как в предыдущем пункте, можно оценить, что формулы ∆α = |
c |
и (17) верны |
|
|
|||
до 89,97° с погрешностью около 9,3%. |
1 |
cosα2 |
|
На основании ОПУ устанавливается трёхосный лазерный гироскоп, который определяет ориентацию основания в местной топоцентрической системе координат. Далее оценим влияние погрешностей гироскопа на измерения.
Погрешность определения курса (рыскания). Пусть X1Y1Z1 (координаты вектора в этой си-
стеме координат будем обозначать А1) — идеальное положение ВСК, параллельной системе координат основания. Через А1 можно выразить координаты вектора А′ в идеальной ИСКМ (X′Y′Z′) (см. рис.2):
96
геодезическое приборостроение
A′ =TZ (−30°)A1. |
(18) |
1 |
|
Теперь введём погрешность определения рыскания гироскопом Δφp: |
|
Aнепр =TZ * (−30°)TY1 (∆ϕр)A1, |
(19) |
где Z* — положение оси Z1 после предшествующего поворота на Δφp.
Далее, аналогично предыдущим рассмотренным пунктам, задавая Aнепр единичным вектором, выражая A1 из (18) и подставляя в (19), имеем:
0 A′ =TZ1 (−30°) TZ * (−30°)TY1 (∆ϕр) −1 1 .
0
После преобразований из этого уравнения получаем следующие значения погрешностей углов поворотов осей А1 и А2 ОПУ, вызванных погрешностями определения рыскания гироскопом:
|
2sin∆ϕ |
|
∆ϕ |
|
|
|
3 |
1−cos∆ϕ |
|
|
|
∆α = |
р |
≈ |
р |
; ∆α |
|
= |
|
( |
р )≈ 0. |
(20) |
|
cos∆ϕ +3 |
2 |
|
|
4 |
|||||||
1 |
|
|
2 |
|
|
|
|
||||
|
р |
|
|
|
|
|
|
|
|
|
|
Погрешность определения дифферента (килевой качки). Аналогично предыдущему пун-
кту, получаем следующее уравнение для координат вектора, задающего оптическую ось, с учётом погрешности дифферента:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|||
|
A′ =TZ (−30°) TZ |
(−30°)TZ |
(∆ψ) −1 |
|
1 |
. |
|
|
|||||||||||||||||
|
1 |
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
Откуда следует, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆α1 = 0 и ∆α2 = ∆ψ. |
|
|
|
|
|
|
|
|
|
(21) |
||||||||||||
Погрешность определения крена (бортовой качки). |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Для координат вектора с учётом погрешности бортовой качки имеем: |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|||
|
A′ =T (−30°) |
T * |
(−30°)T |
|
(∆θ |
к |
) −1 |
|
1 |
. |
|
(22) |
|||||||||||||
|
|
|
Z1 |
Z |
|
|
X1 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Из (22) получаем следующие выражения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
2 |
|
|
|
|
|
|
∆θк |
|
|
|
|
|
|
|
|
|
|
|
||||||
∆α = |
3sin∆θк |
≈ |
|
|
3 |
; ∆α |
|
= |
3 |
(cos∆θ |
|
−1) ≈ 0. |
(23) |
||||||||||||
|
|
|
|
|
|
|
4 |
|
|
|
|
||||||||||||||
1 |
3cos∆θк +1 |
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
к |
|
|
||||||||
Если для других корабельных комплексов требуется передавать координаты в КСК, то по-
грешность положения ВСК относительно КСК можно записать так: |
|
Δφ = Δφp1 – Δφp2, |
(24) |
где Δφ — погрешность взаимного положения КСК и ВСК в плоскости рыскания; Δφp1 — погрешность рыскания в КСК; Δφp2 — погрешность рыскания в ВСК.
Тогда дисперсия погрешности Δφ равна:
D∆ϕ = D∆ϕ1 + D∆ϕ2 . |
(25) |
Аналогичные (24) и (25) равенства можно записать и для погрешностей в плоскостях дифферента и крена.
97
известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
Тогда из (20), (21), (23) можно выразить дисперсии погрешностей Δα1 и Δα2, вызванные погрешностями взаимного положения КСК и ВСК:
|
|
|
D |
= |
1 |
D |
+ D |
+ |
3 |
D |
+ D ; D |
= D |
+ D . |
||
|
|
|
∆α1 |
4 |
( ∆ϕ1 |
∆ϕ2 |
) |
4 |
( ∆θ1 |
∆θ2 ) |
∆α2 |
∆ψ1 |
∆ψ2 |
||
Погрешности положения центра пересечения осей А1 |
и А2. Вводя вектор погрешностей |
||||||||||||||
|
∆x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, получим |
Aнепр |
=TZ (−30°)[A1 − A∆ ]= A′−TZ (−30°)A∆, откуда следует: |
||||||||||
A∆ = |
∆y |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆z |
|
|
|
|
|
A′ = Aнепр +TZ (−30°)A∆ . |
|
|
(26) |
|||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
А |
|
зададим равным |
3 105 |
|
, т.к. в данном случае играет роль расстояние до цели, типич- |
||||||||||
непр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ное значение которого равно 300 км.
Из уравнения (26) выражаем углы поворота осей монтировки:
tg∆α = |
|
|
|
∆z |
|
, sin∆α |
|
= |
∆y − |
3 |
∆x |
. |
|||
∆ |
|
|
|
∆ |
|
|
|
|
|
||||||
1 |
|
|
|
|
|
2 |
|
6 105 |
|||||||
|
x |
+ |
|
3 |
y |
+3 105 |
|
|
|
|
|
|
|||
|
2 |
|
2 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
x, z и видно, что только смещение по оси OZ на |
||||||||||
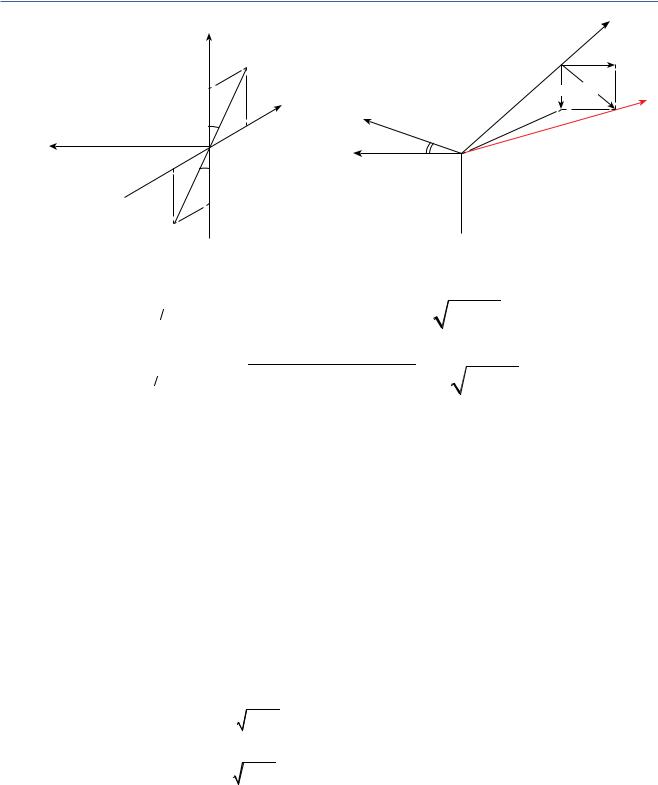
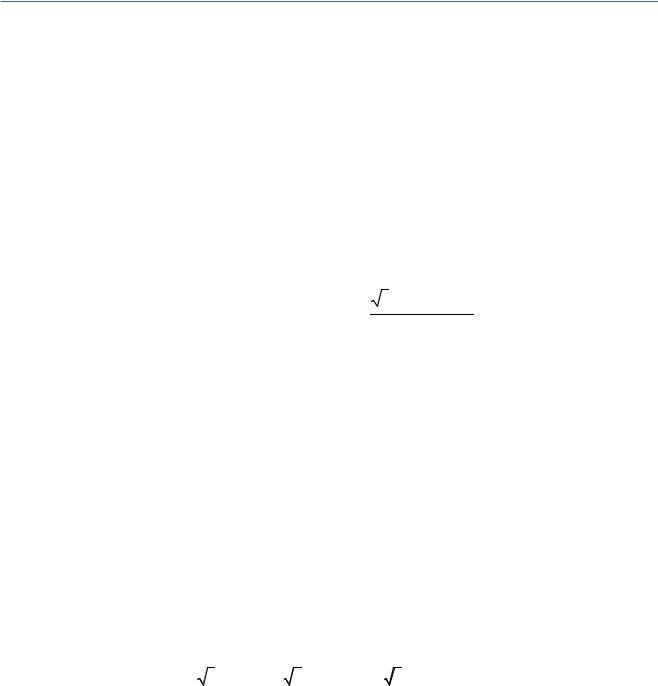
На рис. 10 показана зависимость Δα1 |
от |
||||||||||||||
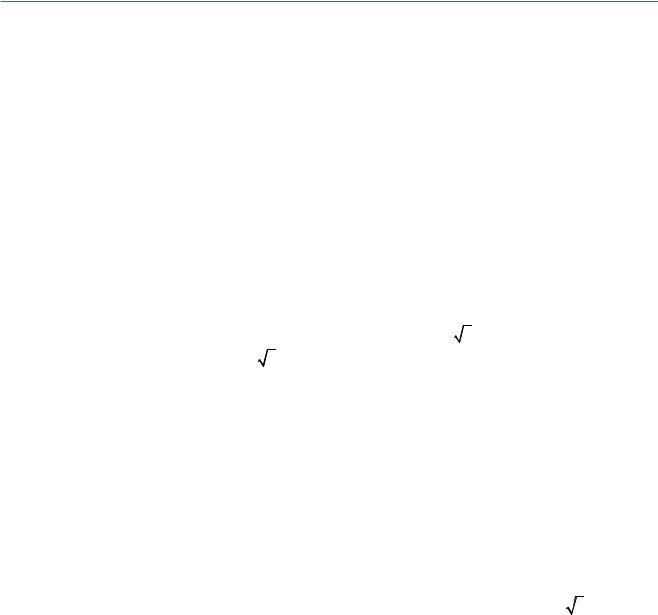
2 м вызывает погрешность около 1″. Из рис. 11 видно, что смещение по оси OX и OY на 1 и –1 м соответственно вызывает погрешность Δα2 около 1″. Таким образом, в рассматриваемой задаче линейные смещения слабо влияют на результирующие погрешности угловых измерений.
Суммарные погрешности. Учитывая (4), (6), (11), (13), (16), (20), (21), (23), для систематиче-
ских погрешностей имеем следующие формулы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε2A cosθ1 sinθ1 cosα1 |
+εA cosθ1 tgα1 tgα2 +εA sinθ1 tgα2 |
|
|
|
|
|
|
|
|
|||||||||||||||||||
∆α1 = arctg |
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
ε2 |
cos |
θ sinθ sinα +ε |
|
|
sinθ |
tgα |
tgα |
|
−ε |
|
cosθ |
tgα |
|
+ |
|
1 |
|
|
|
|
|
|
|
||||||
|
|
|
|
cos |
α |
|
|
|
|
||||||||||||||||||||||
|
|
A1 |
|
1 |
1 |
1 |
A1 |
|
|
1 |
1 |
|
2 |
|
A1 |
1 |
|
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
εA |
cos |
θ2 |
+εA |
sinθ2 tgα2 |
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
∆ϕp |
|
|
|
|
∆θ |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
к |
|
||||||||||||||||
+arctg |
2 |
|
|
2 |
|
|
|
|
+arctg(i tgα2 )+arctg |
|
|
|
|
|
+ |
|
|
|
+ |
|
|
|
; |
||||||||
|
|
2 |
cosθ2 sinθ2 tgα2 |
|
|
|
|
|
2 |
|
|
2 |
|
||||||||||||||||||
|
|
1−εA |
|
|
|
|
|
|
|
|
cosα2 |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆α2 = (ε1 cosα1 −ε2 sinα1 )+ ∆ψ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||||
Как уже оговаривалось — для всех углов поворота, кроме области, близкой к α2= 90°, можно заменить функции арктангенса их аргументами. Далее перейдём к характеристикам случайных
погрешностей: |
|
|
|
|
|
|
|
|
|
|
|
|
)+ 1 D |
+ 3 D |
|
||
M |
|
= 0; |
D |
(α ,α |
) = D(1) |
(α |
,α |
)+ D(2) |
(α |
)+ D(i) (α |
)+ D(c) (α |
+ D , |
|||||
|
1 |
|
1 |
1 |
2 |
1 |
1 |
2 |
|
1 |
2 |
1 |
2 |
1 2 |
4 ϕр |
4 θк |
скр |
где M1 — математическое ожидание погрешности Δα1; D1(α1, α2) — дисперсия погрешности Δα1; |
|||||||||||||||||
Dϕp — дисперсия погрешности измерения рыскания; |
Dθ |
— дисперсия погрешности измерения |
|||||||||||||||
бортовой качки; Dскр |
— дисперсия скручивания каждой из осей А1 и А2. |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
M |
|
= 0; D = |
ε2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m + D + D , |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
2 |
|
2 |
4 |
ψ |
скр |
|
|
|
где M2 — математическое ожидание погрешности Δα2; D2 — дисперсия погрешности Δα2; Dψ — дисперсия погрешности измерения дифферента.
98
геодезическое приборостроение
α1
α2
1"
0,5″
0
0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-0,5" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
||||
-1" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y,м |
||
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
-1 |
|
|
|
|
-0,5 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z,м |
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
-0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
1 |
|
|
|
х,м |
|
|
|
|
|
|
|
|
|
|
|
|
х,м |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
Рис. 10. ЗависимостьΔα1 от |
x и z |
Рис. 11. ЗависимостьΔα2 от x и |
y |
|||||||||||||||||||||||||||||||||
Так как погрешности углов Δα1 и Δα2 складываются из достаточно большого числа статистически независимых погрешностей, то результирующие законы распределения вероятностей принимаем за нормальные.
Далее от математических ожиданий и дисперсий углов поворота Δα1 и Δα2 осуществлялся переход к статистическим характеристикам непосредственно одной угловой погрешности измерения. Угловая погрешность измерения может быть вычислена через скалярное произведение двух единичных векторов — идеального направления оптической оси и вектора, смещённого за счёт рассматриваемых погрешностей.
Координаты единичного вектора в ИСКМ можно выразить через углы поворота ОПУ следующим образом:
|
X ′ |
−sinα2 |
|
|
|
|
|
|
|
|
(27) |
Y′ |
|
= cosα1 cosα2 |
. |
||
|
|
|
|
|
|
|
Z′ |
sinα1 cosα2 |
|
|
|
Тогда, учитывая (27), можно получить следующее выражение:
sin2 ∆ϕ =1− sinα2 sin(α2 + k∆α2 )+cosα1 cosα2 cos(α1 + k∆α1 )cos(α2 + k∆α2 )+
1 |
2 |
sin |
( 1 |
1 ) |
cos |
( 2 |
+ k∆α |
2 ) |
2 , |
(28) |
+sinα cosα |
|
α + k∆α |
α |
|
||||||
где Δφ — угловая погрешность измерения; k — коэффициент перехода от угловых секунд к радианам, равный π/180·3600.
Математическое ожидание MΔφ=0. Принимая условие, что ввиду малости погрешностей |
||||||||||||||||||||||||||||||||||||||||
sinΔφ ≈ Δφ, дисперсия угловой погрешности измерения вычисляется по формуле: |
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
∞ ∞ |
|
|
|
|
|
|
|
2 |
|
|
exp |
|
|
2 |
d∆α d∆α |
|
||||||||
D (α ,α |
|
) = |
|
|
|
|
|
|
|
|
∫ ∫ sin2 ∆ϕexp |
|
|
−∆α1 |
|
|
|
−∆α2 |
. (29) |
|||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
||||||||||||||||||||
∆ϕ |
1 |
|
|
|
|
2πD1(α1,α2 ) 2πD2 −∞ −∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
2D1(α1,α2 ) |
|
|
|
|
2D2 |
|
|
|
|
||||||||||||||||||||||
После преобразований (28), подстановки в (29) и взятия интегралов получим: |
|
|
|
|||||||||||||||||||||||||||||||||||||
D |
(α ,α |
2 |
) = − cos4 α2 |
3e−2k2D2 |
+e−2k2 |
(D1+D2 ) |
−4e−k2(D1 |
2+2D2 ) |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
∆ϕ |
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
+ |
1 |
cos |
2 |
α2 |
(−e |
−2k2D |
|
|
|
−2k |
2D |
−2k2(D +D |
) |
−8e |
−k2(D |
2+2D |
) |
+1) |
+ |
1 |
(1 |
−e |
−2k2D |
), |
(30) |
|||||||||
|
|
|
|
|
|
4 |
|
|
1 +7e |
|
2 +e |
1 |
2 |
|
|
1 |
|
|
2 |
|
2 |
2 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
99
известия высших учебных заведений. геодезия и аэрофотосъемка, № 6, 2010
где D1 = D1(α1, α2). |
|
|
Далее к дисперсии (30) необходимо прибавить некоторые другие составляющие: |
|
|
D∆ϕ∑ (α1,α2 ) = D∆ϕ (α1,α2 )+ Dдеф + Dооскр + Dнагр + Dтеплвмд , |
(31) |
|
где DΔφΣ(α1, α2) — дисперсия суммарной угловой погрешности; Dдеф |
— дисперсия отклонения |
|
оптических осей за счёт деформации ОПУ и опорного блока; Dооскр |
— дисперсия отклонения |
|
оптических осей за счёт скручивания осей ОПУ, вызываемого неуравновешенностью вращаю- |
||
щихся частей, сопротивлением от скручивания кабелей и моментами сопротивления в опорах |
||||||||||
качения; Dнагр — дисперсия отклонения оптических осей за счёт деформации ОПУ от нагрева |
||||||||||
при прямом солнечном облучении; DтеплВМД |
— дисперсия отклонения оптических осей за счёт |
|||||||||
деформации ОПУ от тепловыделений высокомоментных двигателей. |
||||||||||
σϕ |
СКО |
частных |
погрешностей |
были заданы следующими: σi = 5″; σc = 20,6″; σскр = 1″; |
||||||
=σθ = σ |
= 3,(3)″; σ |
= 2,7″; σ |
= 0,7″; σ |
нагр |
= 5,7″; σ |
теплВМД |
= 1,7″. На рис. 12 представлен гра- |
|||
p |
к |
ψ |
|
деф |
ооскр |
|
|
|
||
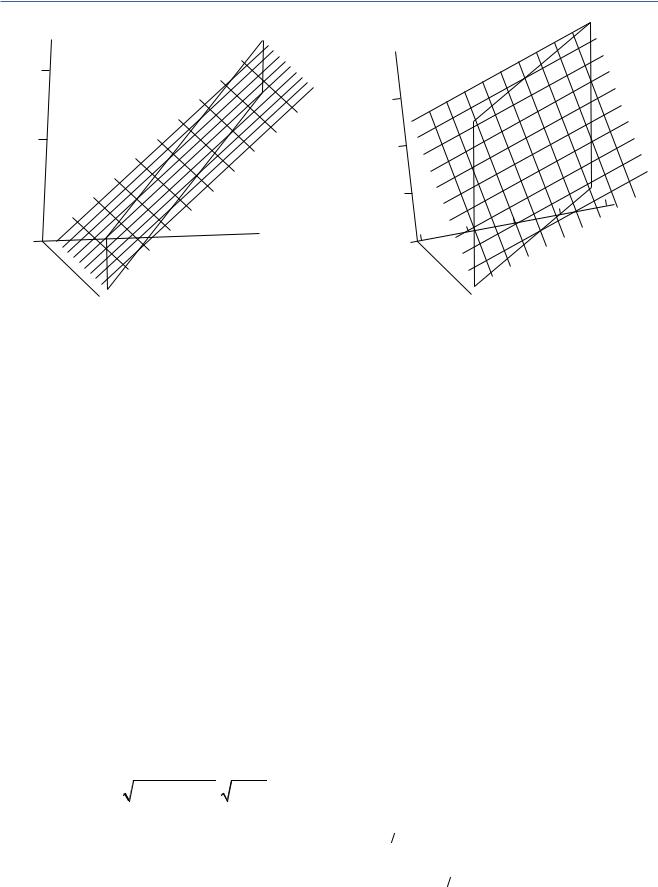
фик СКО суммарной угловой погрешности. Оценим значение погрешности в КСК (Δφ′) в зави-
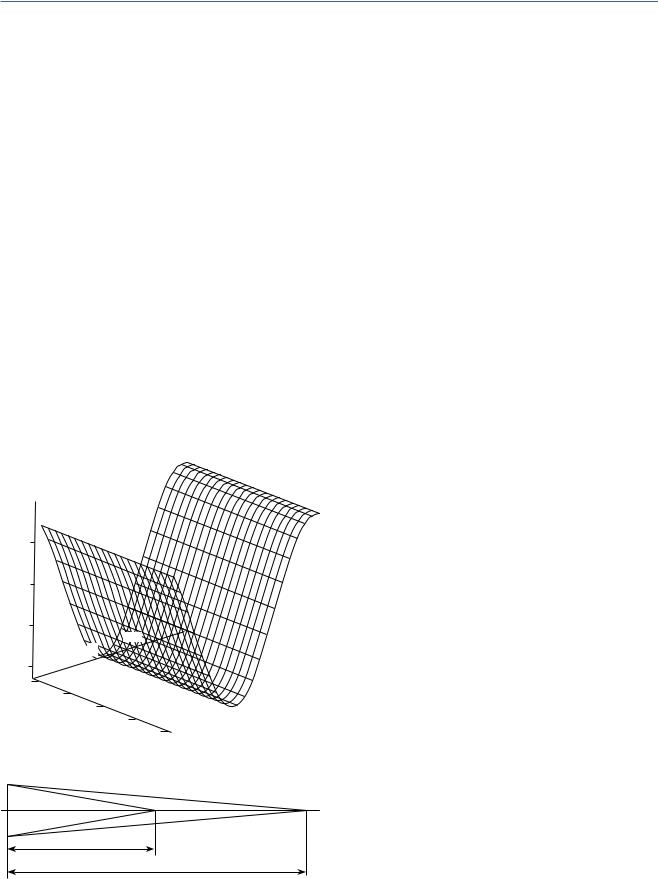
симости от подсчитанной выше суммарной угловой погрешности в ИСКМ (ΔφΣ). Наибольшее различие углов ΔφΣ и Δφ′ (рис. 13) будет при наибольшей разнице расстояний от объекта до этих двух систем координат ИСКМ и КСК — 63,6 м (расстояние между точками Ц0 и Ц1), т.е. когда объект расположен на продолжении линии, соединяющей Ц0 и Ц1 (см. рис.2). При этом
∆ϕ′ |
= |
3 105 |
= 0,9998, |
|
3 105 +63,6 |
||
∆ϕΣ |
|
||
т.е. суммарную угловую погрешность в КСК можно считать равной погрешности в ИСКМ с дисперсией (31).
σΔφ∑
21,6"
21,5"
21,4"
α2 0 50º 21,3" -50º
-100
-50º
0
50
100º α1
Рис. 12. СКО суммарной угловой погрешности
|
|
|
Ц1 |
|
|
|
Ц0 |
Δφ |
Σ |
|
Δφ' |
|
|
||
|
|
|
|
|
3·105
3·105+63,6
Таким образом, предложена методика определения угловой погрешности вследствие биений в произвольной плоскости, других геометрических погрешностей, а также погрешностей определения качек, с учётом применения в комплексе нестандартной монтировки. Были получены выражения вероятностных характеристик угловой погрешности измерения комплекса в зависимости от вероятностных характеристик частных погрешностей и углов поворота для всего диапазона их изменения.
ЛИТЕРАТУРА
1.Авзалов И.З. Методика пересчёта координат корабельного оптического комплекса // Изв. вузов. «Геодезия и аэрофото-
съёмка». 2010. –№ 2. –С. 95–98.
2.Высокоточные угловые измерения / Д.А. Аникст,
К.М. Константинович, И.В. Меськин и др.; Под ред. Ю.Г. Якушенкова. –М.: Машиностроение, 1987. –480 с.
3. Дворяшин Б.В. Метрология и радиоизмерения: Учеб. пособие для студ. высш. учеб. заведений. –М.: Академия, 2005. –304 с.
Поступила 23 сентября 2010 г. Рекомендована кафедрой прикладной оптики МИИГАиК
Рис. 13. Угловые погрешности в ИСКМ и КСК
100