

4 Связь координат точек местности и их изображений на сканерных снимках
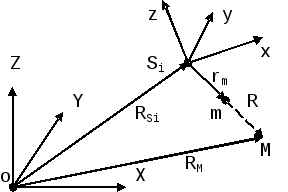
OXYZ – система координат объекта. SXYZ – система координат сканера. RSi – вектор, определяющий положение центра проекции i-й строки в системе координат объекта. rm – единичный вектор, определяющий положение текущей точки в системе координат объекта. RM – определяет положение точки М в системе координат объекта относительно системы координат сканера.
Задача: найти RM. Известны координаты r в системе координат сканера.
![]() (1)
(1)
R – вектор, коллинеарный r.
![]() (2)
(2)
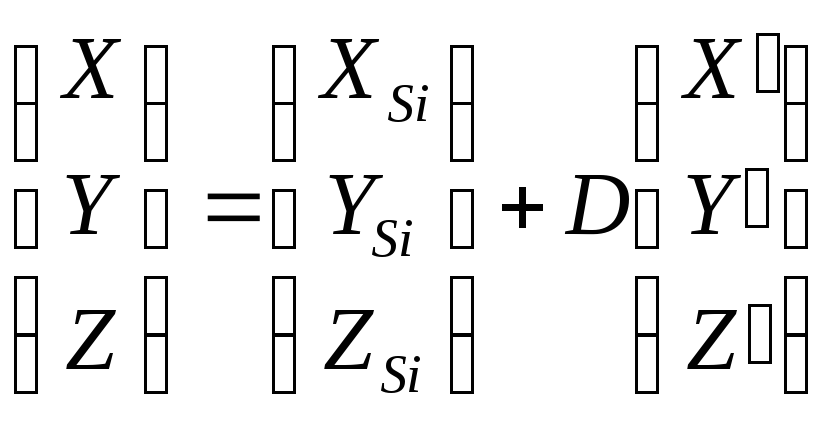
D – расстояние от центра проекции до точки M. Подставим (2) в (1).
![]() (3)
(3)
Запишем (3) в координатной форме:
 (4)
(4)
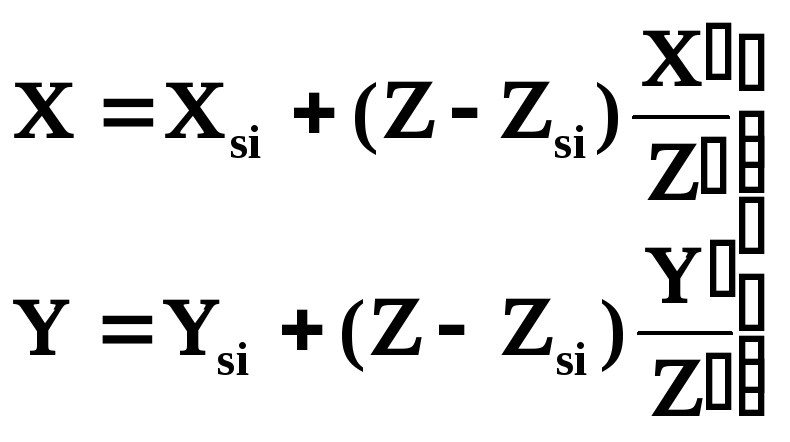
Выразим D из третьего уравнения и подставим в первые два. Получим:
 где
где
![]() (4)
(4)
Xsi, Ysi, Zsi – значения линейных элементов внешнего ориентирования съемочной системы в момент получения изображения i строки снимка.
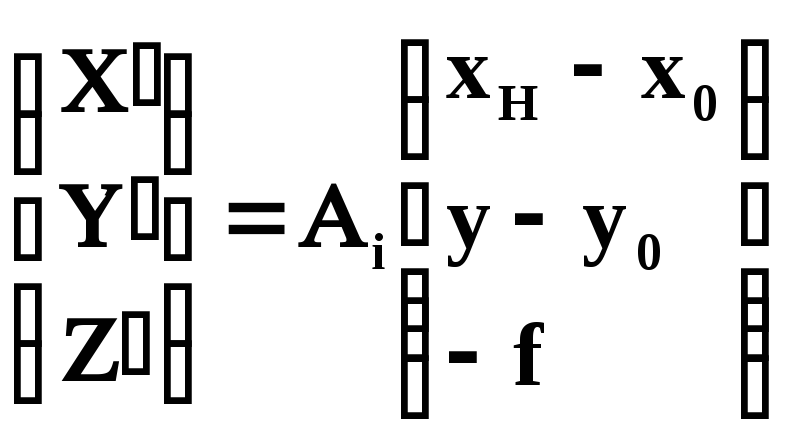
Ai, ωi, αi, æi - матрица поворота и соответствующие ей углы наклона и поворота системы координат сканера в момент формирования i строки изображения.
По координате xс мы определяем время формирования изображения i строки снимка.
Если используется камера с несколькими линейками, то:
 ,
или
,
или
 (5)
(5)
Если при съемке элементы внешнего ориентирования сканера неизвестны или известны с недостаточной точностью, обработку снимков производят в 2 этапа:
1. По опорным точкам определяют значения элементов внешнего ориентирования сканера в момент формирования изображения начальной строки и закон изменения этих элементов во времени;
2. По формулам (4) определяют координаты точек местности.
Эта методика подходит только для космических снимков, т. к. траекторию движения аппарата в космосе легко смоделировать.
Для каждой опорной точки записывают уравнение коллинеарности:
 ,
где
,
где
 ,
а (6)
,
а (6)
 (7)
(7)
![]() –значения
элементов внешнего ориентирования
сканера в момент формирования первого
строки снимка;
–значения
элементов внешнего ориентирования
сканера в момент формирования первого
строки снимка;
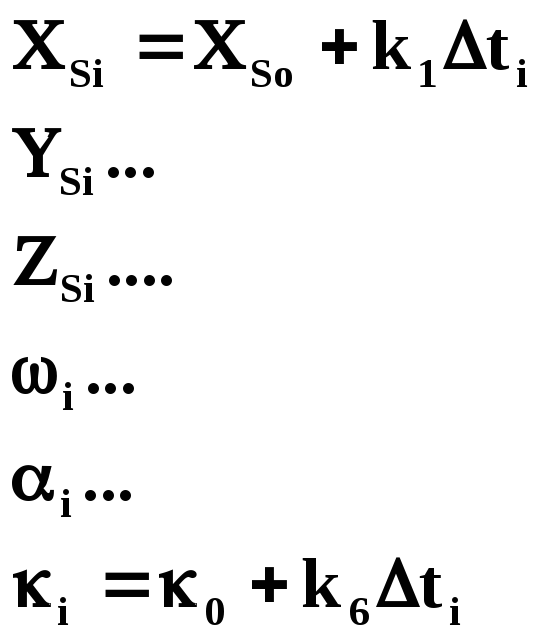
k1,…..k6 – коэффициенты, характеризующие закон изменения элементов внешнего ориентирования сканера во времени;
![]() (8)
(8)
ti - время получения i- й строки изображения, to - время получения первой строки изображения. Эти величины определяются по измерениям xc точек на сканерном изображении.
Уравнения (7) характеризуют линейный закон изменения элементов внешнего ориентирования сканера в зависимости от времени. Возможна другая модель изменения ЭВО сканера, например полином второй степени:
 (9)
(9)
Коэффициенты d будут описывать ускорение изменения ЭВО сканера.
Каждая опорная точка дает возможность составить 2 уровня (6). Для определения неизвестных значений элементов внешнего ориентирования сканера в момент формирования первой строки Xso….κo и коэффициентов k1… k6 необходимо измерить min 6 опорных точек для составления 12 уравнений. Если еще необходимо определить di (ускорение), то необходимо 9 опорных точек.
При решении обратной засечки по сканерному изображению для равнинной территории возникает неопределенность (множественность) решения задачи определения элементов внешнего ориентирования сканера для всех его положений в пространстве XSo XSi (рис.8).
Для избежания этого эффекта следует зафиксировать один из элементов : XSo, ZSo, αo. При космической съемке лучше зафиксировать высоту фотографирования ZSo .
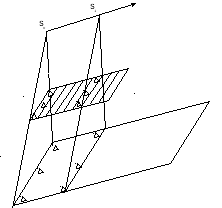
Рис.8
После решения обратной засечки определение координат точек местности осуществляется по формулам (4).