

Теория одиночного снимка Снимок как центральная проекция местности.
Если предположить, что на снимке отсутствуют искажения, вызываемые дисторсией объектива съемочной камеры, атмосферной рефракцией и другими причинами, то снимок можно рассматривать как центральную проекцию объекта на плоскость.
Проекция объекта, полученная в результате пересечения плоскости с проектирующими лучами, пересекающимися в одной точке, называется центральной, а точка пересечения этих лучей - центром проекции.
Совокупность проектирующих лучей, при помощи которых получен снимок, называют связкой проектирующих лучей.
В дальнейшем мы будем исследовать свойства снимка как центральной проекции с целью использования этих свойств для определения координат точек местности, а так же для создания топографических планов и карт.
При центральном проектировании различают негативное (обратное) и позитивное (прямое) изображения (рис.1.1).
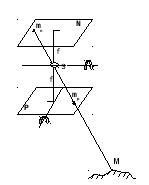
Рис. 1
Позитив P получают в случае, когда объект и плоскость проекции расположены по одну сторону от центра проекции S, а негатив N – в в случае когда объект и плоскость проекции расположены по разные стороны от центра проекции S.
Негатив и позитив располагаются симметрично по разные стороны от центра проекции S. Если негатив развернуть на 180о вокруг оси, проходящей через центр проекции S параллельно плоскостям негатива и позитива, а затем развернуть вокруг оси, лежащей в плоскости позитива и перпендикулярной оси первого разворота, то все точки негатива совпадут с точками позитива. Поэтому при анализе снимка можно рассматривать как негатив, так и позитив. В дальнейшем чаще будем рассматривать позитив, который, как и негатив, будем называть снимком.
Рассмотрим некоторые элементы центральной проекции (рис.1.2).
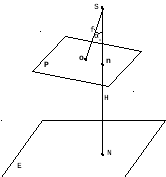
Рис.1.2
P – плоскость снимка.
E – предметная (горизонтальная) плоскость.
S – центр проекции (точка фотографирования).
о – главная точка снимка – след пересечения плоскости снимка главным лучом. Главный луч – это луч, проходящий через центр проекции S перпендикулярно плоскости снимка.
So = f – фокусное расстояние съемочной камеры – расстояние от центра проекции до снимка вдоль главного луча.
n – точка надира – пересечение отвесной линии, проходящей через центр проекции, с плоскостью снимка.
N – проекция точки надира снимка на плоскость Е.
SN = H – высота фотографирования - высота центра проекции относительно предметной плоскости.
αо – угол наклона снимка.
Из этого рисунка легко получить следующее выражение, определяющее расстояние между важнейшими точками центральной проекции:
![]()
Некоторые свойства центральной проекции
Любая точка местности М на снимке изображается точкой m (рис.1.3). Прямой линии на местности (K-L) в общем случае соответствует прямая (k-l) на снимке. В частном случае, когда прямая линия на местности (D-F) проходит через центр проекции S, она изображается на снимке в виде точки (df).
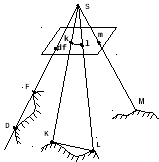
Рис. 1.3
Точка надира n является точкой схода изображений на снимке вертикальных линий объекта (рис. 1.4)
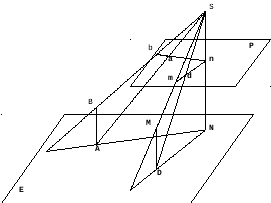
Рис. 1.4
Здесь AB и DM - вертикальные линии на объекте, а ab и dm – их изображения в плоскости снимка P. N – точка надира в предметной плоскости Е.
Если продолжить изображения вертикальных линий ab и dm, то они пересекутся в точке надира n. Для доказательства этого обстоятельства достаточно провести плоскости через вертикальные линии AB и DM и центр проекции S. Так как эти плоскости вертикальные, то они пересекутся по вертикальной линии SN, проходящей через центр проекции S и точку надира n (которая по определению является точкой пересечения плоскости снимка с отвесной линией, опущенной из центра проекции S). Очевидно, что изображения ab и dm вертикальных линий AB и DM находятся на следах пересечения плоскости снимка вертикальными плоскостями SAB и SDM и пересекаются в точке надира n.
Линия действительного горизонта ii является геометрическим местом точек схода i изображений параллельных прямых линий объекта (рис. 1.5).
Построим изображение прямой АВ, расположенной в предметной плоскости Е. Для этого продолжим данную прямую до пересечения с осью перспективы ТТ (линия пересечения плоскости снимка с плоскостью объекта). Полученная таким образом точка Т является одновременно и изображением на снимке. Теперь продолжим линию АВ в обратном направлении до бесконечности. Очевидно, что проектирующий луч, идущий от бесконечно удаленной точки, лежащей на линии, параллелен этой линии и пересекает снимок в точке схода i, лежащей на линии действительного горизонта. Изображение линии на снимке получают в результате соединения точек i и Т.
Аналогично строят изображения других линий. Если они параллельны между собой в плоскости Е, то из изображения на снимке пересекаются в точке схода i.
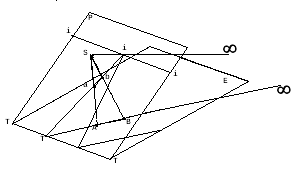
Рис. 1.5