

3.2 Порядок выполнения работы
3.2.1 Использование электромеханических приборов.
1) Записать параметры приборов в таблицу 3.1.
Таблица 3.1 - Параметры приборов
|
Амперметр |
Вольтметр |
|
цена деления = ; предел измерения IN = А; внутр. сопротивление RА= Ом; класс точности КА = %. |
цена деления = ; предел измерения UN = В; вх. сопротивление RV = Ом; класс точности КV = %. |
2) Собрать схемы, соответствующую (см. рисунки 3.1,а и б) при Е = 3В.
RX = 15 … 30 Ом выставляется на магазине сопротивления типа Р33. Результаты измерений занести в таблицу 3.2.
Таблица 3.2 – Измерение RX по методу амперметра и вольтметра
|
Показания приборов и расчеты |
Схема 1 |
Схема 2 |
|
Показания амперметра I .., A Показания вольтметра U, В Сопротивление Rизм = U/ I, Ом Метод.
погрешность
Инстр. погрешность и , Ом и , % Результат измерения R=Rизм R |
|
|
3.2.2 Использование цифровых приборов.
1) Выполнить пункты 1 и 2 для схемы, представленной на рисунке 3.1,а.
3.2.3 Задание.
Для электромеханических и цифровых приборов:
- измерить заданное сопротивление, используя различные способы включения приборов;
- определить истинное значение сопротивления.
3.3 Контрольные вопросы
1) В чем заключаются преимущества и недостатки метода А – V?
2) Могут ли обе схемы дать одинаковые методические погрешности?
3) Чему равна относительная погрешность косвенного измерения?
4) Метод A – V пригоден для измерения очень маленьких сопротивлений?
5) Достоинства и недостатки использования цифровых приборов?
4 Лабораторная работа. Модель схемы компенсатора в LabView
Цель работы: изучить компенсационный метод с учетом погрешностей применяемых технических средств измерения.
4.1 Общие сведения
Компенсационная схема имеет два источника питания: изменяемое напряжение Ux и опорное (образцовое) напряжение U0 (см. рисунок 4.1).
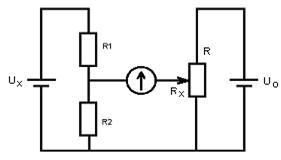
Рисунок 4.1 – Схема измерения напряжения компенсационным методом
Измеряемое напряжение, измененное делителем напряжения, будет равно
![]() ,
,
где k – коэффициент делителя напряжения, k = R2/(R1 + R2).
Напряжение, снимаемое с потенциометра R, будет равно
![]() ,
,
где Rx – сопротивление между движком и нижним выводом потенциометра;
R – полное сопротивление потенциометра.
Токи от двух источников питания направлены встречно. Следовательно, изменяя сопротивление Rx потенциометра, можно добиться равенства токов, а это возможно при условии
![]() .
.
Тогда
![]() .
(4.1)
.
(4.1)
Потенциометр (см. рисунок 4.2) состоит из каркаса 1, на который намотан провод 2, изготовленный из материала с высоким удельным сопротивлением, и токосъемного движка 3, укрепленного на оси . Движок касается провода 2. В показанной конструкции контакт с подвижным движком осуществляется с помощью неподвижного токосъемного кольца 4.
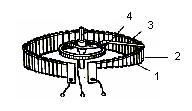
Рисунок 4.2 – Внешний вид потенциометра без корпуса
Для намотки используется проволока малого диаметра (константан, сплав платины, золота), так как чем меньше диаметр, тем меньше ступенчатость статической характеристики (см. рисунок 4.3).
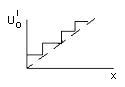
Рисунок 4.3 – Зависимость напряжения выхода потенциометра
от перемещения движка
Погрешность потенциометра обусловлена скачкообразным изменением сопротивления ΔR при переходе движка с одного витка на другой. Если в качестве номинальной функции преобразования принять функцию, проходящую посредине "ступенек", то максимальное значение приведенной погрешности, обусловленное дискретностью
![]() ,
(4.2)
,
(4.2)
где R - полное сопротивление преобразователя.