

Лаб.раб. по механике / Лабораторная работа № 9
.docЛАБОРАТОРНАЯ РАБОТА №9
ИЗУЧЕНИЕ ГИРОСКОПА
ЦЕЛЬ РАБОТЫ: изучение динамики вращательного движения и опытная проверка основного уравнения элементарной теории гироскопа.
ОБОРУДОВАНИЕ: гироскоп, мотор, счетчик оборотов, электронный секундомер, выпрямитель.
КРАТКАЯ ТЕОРИЯ
Гироскопом называется массивное симметричное тело, которое вращается с большой скоростью вокруг оси симметрии (оси собственного вращения). Гироскоп устанавливается в кардановом подвесе так, что его центр тяжести находится на пересечении трех осей вращения и при любом их повороте центр остается неподвижным.
Поведение гироскопа описывается уравнением:
![]() ,
(9.1)
,
(9.1)
где:
![]() - момент импульса гироскопа относительно
точки О;
- момент импульса гироскопа относительно
точки О;
![]() - момент внешних
сил относительно точки О;
- момент внешних
сил относительно точки О;
точка О – центр тяжести.

![]()
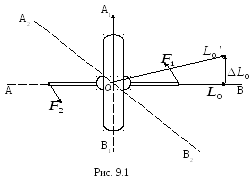
Так как сила тяжести
не создает момента относительно точки
О, то вектор
![]() ,
а следовательно, и ось вращения гироскопа
АВ (рис. 9.1) будут сохранять определенное
положение в пространстве, независимое
от положения карданова подвеса. Это
свойство гироскопа находит широкое
применение в технике.
,
а следовательно, и ось вращения гироскопа
АВ (рис. 9.1) будут сохранять определенное
положение в пространстве, независимое
от положения карданова подвеса. Это
свойство гироскопа находит широкое
применение в технике.
Если же на гироскоп
будут действовать внешние силы (например,
пара сил
![]() и
и
![]() ),
стремящиеся изменить положение его оси
вращения, то возникает так называемый
гироскопический эффект: ось гироскопа
повернется не в направлении действующих
сил, т.е. вокруг оси вынужденного вращения
А1В1,
а вокруг третьей оси А2В2,
перпендикулярной к двум первым. Такое
движение гироскопа называется регулярной
процессией, и оно легко объясняется с
помощью уравнения (9.1).
),
стремящиеся изменить положение его оси
вращения, то возникает так называемый
гироскопический эффект: ось гироскопа
повернется не в направлении действующих
сил, т.е. вокруг оси вынужденного вращения
А1В1,
а вокруг третьей оси А2В2,
перпендикулярной к двум первым. Такое
движение гироскопа называется регулярной
процессией, и оно легко объясняется с
помощью уравнения (9.1).
Действительно,
при достаточно длительном действии сил
![]() и
и
![]() за
время
за
время
![]() момент импульса гироскопа изменится
на
момент импульса гироскопа изменится
на
![]() и станет равным
и станет равным
![]() .
.
При этом вектор
![]() определит новое положение оси собственного
вращения АВ, так как она должна повернуться
вокруг оси прецессии А2В2
на некоторый угол
определит новое положение оси собственного
вращения АВ, так как она должна повернуться
вокруг оси прецессии А2В2
на некоторый угол
![]() .
Из рисунка видно, что
.
Из рисунка видно, что
![]() ;
;
![]()
а угловая скорость прецессионного движения будет равна:
![]() или
или
![]() (9.2)
(9.2)
Так как векторы
![]() ,
,
![]() и
и
![]() взаимно перпендикулярны, то соотношение
(9.2), учитывая расположение этих векторов,
можно переписать в векторном виде:
взаимно перпендикулярны, то соотношение
(9.2), учитывая расположение этих векторов,
можно переписать в векторном виде:
![]() (9.3)
(9.3)
Эта формула получена
для частного случая, когда
![]() и
и
![]() и
и
![]() перпендикулярны оси АВ. Однако, она
справедлива и в самом общем случае.
перпендикулярны оси АВ. Однако, она
справедлива и в самом общем случае.
Таким образом, если на гироскоп, вращающийся вокруг оси АВ, действуют внешние силы, стремящиеся повернуть его вокруг некоторой оси А1В1, то он начинает поворачиваться вокруг третьей оси А2В2 – оси прецессии так, чтобы оси АВ и А1В1 составляли по возможности меньший угол или совпадали.
Итак, в общем случае
гироскоп участвует одновременно в двух
вращениях со скоростями
![]() и
и
![]() .
Поэтому его момент импульса равен
.
Поэтому его момент импульса равен
![]() ,
,
где J
и J1
– моменты инерции гироскопа относительно
осей АВ и А1В1.
Так как
![]() >>
>>
![]() ,
то можно положить, что
,
то можно положить, что
![]() ,
и повороты вектора
,
и повороты вектора
![]() и оси АВ будут практически одинаковы.
На этом допущении и основана приближенная
теория гироскопа.
и оси АВ будут практически одинаковы.
На этом допущении и основана приближенная
теория гироскопа.
Следовательно, соотношение (9.3) можно записать в виде:
![]() (9.4)
(9.4)
или
![]() (9.4а)
(9.4а)
Из (9.4а) следует, что:
-
Если
 ,
то и
,
то и
 ,
т.е. если будут выполняться эти условия,
то можно убедиться в справедливости
соотношения (9.4).
,
т.е. если будут выполняться эти условия,
то можно убедиться в справедливости
соотношения (9.4). -
Если известны
 ,
,
 и
и
 ,
то можно определить момент инерции
гироскопа относительно его оси
собственного вращения.
,
то можно определить момент инерции
гироскопа относительно его оси
собственного вращения.
Таким образом,
выполнение работы сводится к нахождению
угловых скоростей
![]() и
и
![]() при заданном моменте внешних сил.
при заданном моменте внешних сил.
ЭКСПЕРИМЕНТАЛЬНАЯ УСТАНОВКА И МЕТОДИКА ИЗМЕРЕНИЙ
В настоящей работе
используется усовершенствованный
демонстрационный гироскоп, состоящий
из массивного диска, подшипники которого
закреплены в подвижной рамке,
поворачивающейся вокруг горизонтальной
оси – оси нутации и вертикальной – оси
прецессии. Таким образом, диск может
поворачиваться вокруг трех осей, две
из которых всегда перпендикулярны.
Подвижной груз, насаженный на стержень,
может быть установлен на различных
расстояниях l
от оси нутации, создавая тем самым
различные моменты сил относительно
этой оси
![]() ,
если ось собственного вращения
горизонтальна. На вилке установлен
электромотор для придания необходимого
числа оборотов ротору гироскопа. У
стопорного винта расположены два
изолированных друг от друга полукольца,
по которым скользит подвижной контакт,
укрепленный у основания вилки.
,
если ось собственного вращения
горизонтальна. На вилке установлен
электромотор для придания необходимого
числа оборотов ротору гироскопа. У
стопорного винта расположены два
изолированных друг от друга полукольца,
по которым скользит подвижной контакт,
укрепленный у основания вилки.
Электрическая
схема собрана так, что ток от источника
ВС-4-12 через металлические детали
гироскопа проходит до подвижного
контакта. Когда подвижной контакт
подходит к проводящему полукольцу, цепь
замыкается, срабатывает реле РЭО6 и
одновременно включает секундомер и
счетчик числа оборотов ССУ-М. Как только
подвижной контакт попадает на непроводящее
полукольцо, цепь размыкается, и счетчики
одновременно отключается. Таким образом,
можно измерить число оборотов и время
за которое диск гироскопа повернется
на угол
![]() .
По этим данным можно найти угловые
скорости
.
По этим данным можно найти угловые
скорости
![]() и
и
![]() .
.
ЗАДАНИЯ
-
Изучите теорию данного вопроса.
-
Изучите экспериментальную установку. Установите расположение следующих осей: 1) оси собственного вращения гироскопа;
2) оси прецессии;
3) оси нутации.
3. При заданном
направлении вращения диска гироскопа
и положении груза на штанге, определите
направление угловой скорости
![]() прецессии гироскопа. Ответ обосновать.
прецессии гироскопа. Ответ обосновать.
4. Вычислите угловую
скорость
![]() собственного вращения гироскопа по
формуле:
собственного вращения гироскопа по
формуле:
![]() (9.5)
(9.5)
и угловую скорость прецессии гироскопа по соотношению:
![]() (9.6)
(9.6)
5. При заданном
положении груза на штанге по формулам
(9.5) и (9.6) найти
![]() и
и
![]() для трех различных случаев и убедиться
в справедливости соотношения
для трех различных случаев и убедиться
в справедливости соотношения
![]()
6. Рассчитайте момент инерции гироскопа по формуле:
![]()
7. Измените положение груза на штанге и выполните задания 3, 4, 5.
8. Найдите среднее значение момента инерции гироскопа.
9. Оцените погрешность, допущенную при измерении.
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Дайте определение основных кинематических и динамических вращательных физических величин.
2. Дайте определение гироскопа. Сформулируйте основное положение приближенной теории гироскопа.
3. Дайте определение явлений прецессии, нутации, собственного вращения. Укажите соответствующие оси на экспериментальной установке.
4. Установите связь
между моментом силы
![]() ,
моментом импульса
,
моментом импульса
![]() и скоростью прецессии
и скоростью прецессии
![]() .
Укажите направление этих векторов на
экспериментальной установке.
.
Укажите направление этих векторов на
экспериментальной установке.
5. Поясните, почему
в данной работе
![]() и
и
![]() можно рассчитать по формулам (9.5) и (9.6)?
можно рассчитать по формулам (9.5) и (9.6)?
6. Можно ли при
выполнении данной лабораторной работы
вместо выражения
![]() пользоваться выражением
пользоваться выражением
![]() ?
?
7. Как могут быть использованы в науке и технике свойства гироскопа? Приведите примеры.