

Из уравнения ясно, что поверхность симметрична относительно координатных осей. При сечении поверхности плоскостями z = ±h получаются эллипсы
x2 |
+ |
y2 |
= |
h2 |
x2 |
+ |
y2 |
=1 |
||
|
|
или |
|
|
|
|
||||
|
|
|
2 |
|
2 |
|||||
a2 |
|
b2 |
|
c2 |
a2 |
h |
|
b2 |
h |
|
|
|
c2 |
|
c2 |
|
|||||
с полуосями ahc и bhc .
Если же пересекать поверхность плоскостями x = ±h или y = ±h , то в сечении получим гиперболы
z |
2 |
|
y2 |
|
h2 |
z 2 |
|
x2 |
|
h2 |
|
||||||
|
|
− |
|
|
= |
|
|
|
|
|
− |
|
|
= |
|
|
. |
c |
2 |
|
b |
2 |
|
a |
2 |
|
2 |
|
a |
2 |
|
b |
2 |
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
||||||
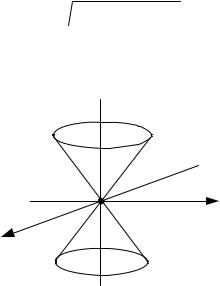
Если ее пересекать плоскостями y = ±hx , то в сечении получим пару пересекающихся прямых
z = ±cx (1/ a2 )+ (h2 / b2 ).
(1/ a2 )+ (h2 / b2 ).
Уравнению удовлетворяет точка (0,0,0), следовательно, поверхность проходит через начало координат. Вид поверхности показан на рисунке 1.7.14.
z
O
y
x
Рис. 1.7.14.
Цилиндры второго порядка
Определение 1.7.3
Поверхность, описываемая прямой, параллельной некоторому заданному направлению и пересекающей данную линию L, называется цилиндрической. При этом движущаяся прямая называется образующей, а прямая L - направляющей цилиндра.
Если образующая цилиндра параллельна какой-то из координатных осей, то цилиндрическая поверхность задается уравнением второго порядка с двумя переменными:
F(x, y)= 0 , образующая параллельна оси Oz ;
F(x, z)= 0 , образующая параллельна оси Oy ;
F(y, z)= 0 , образующая параллельна оси Ox .
Эллиптический цилиндр
|
|
x2 |
|
y2 |
(a,b > 0) . |
||
|
|
|
+ |
|
|
=1 |
|
|
|
a2 |
b2 |
|
|||
|
|
|
|
|
|
||
Уравнение |
не содержит переменной |
z , следовательно, цилиндр параллелен оси Oz . |
|||||
Направляющей |
цилиндра на плоскости |
|
xOy |
является эллипс с полуосями a и b . |
|||
|
|
|
|
|
75 |
|
|
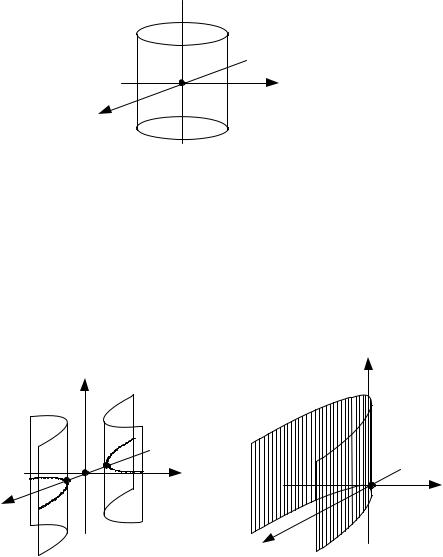
Цилиндрическая поверхность, описанная прямой, параллельной оси Oz , и пересекающей эллипс
x2 |
+ |
y2 |
=1 |
, построена на рисунке 1.7.15. |
|
a2 |
b2 |
||||
|
|
|
z 
O |
y |
|
|
x |
|
|
|
|
|
Рис. 1.7.15. |
|
|
|
|
|
|
Гиперболический и параболический цилиндры |
|
|
|
|
|
|||||
|
x2 |
− |
y2 |
=1 (a,b > 0) и y2 |
= 2 px ( p > 0) . |
|
|
|
|
|
|
a2 |
|
|
|
|
|
||||
|
|
b2 |
|
|
|
|
|
|||
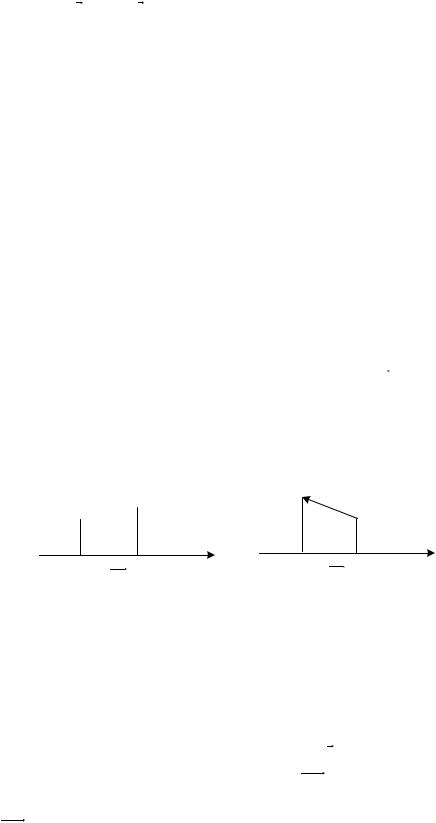
В данном случае направляющими линиями поверхностей являются гипербола |
x2 |
− |
y2 |
=1 и |
||||||
a2 |
b2 |
|||||||||
|
|
|
|
|
|
|
|
|||
парабола y2 = 2 px , а образующими — прямые, параллельные оси |
Oz и проходящие через |
гиперболу или параболу в плоскости xOy . Поверхности изображены на |
рисунках 1.7.16 и 1.7.17. |
z |
|
z |
|
|
|
|
|
O |
y |
O |
y |
|
|||
x |
|
||
|
|
|
|
|
|
x |
|
Рис. 1.7.16. |
|
Рис. 1.7.17. |
|
76
Если коллинеарны два ненулевых вектора, |
то |
|
их координаты пропорциональны, т.е. для |
||||||||||
|
x |
|
x |
|
|
|
|
|
|
|
|
||
коллинеарных векторов a = |
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
y1 |
, |
b = y2 |
условие коллинеарности принимает вид: |
||||||||||
|
z |
|
z |
2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
x1 |
= |
y1 |
= |
z1 |
. |
||
|
|
|
|
|
|
x |
|
|
|||||
|
|
|
|
|
|
|
y |
2 |
|
z |
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||
Задача 1.3.1
|
|
r |
|
p |
r |
|
Выясните, при каких значениях |
p и q |
|
1 |
|
||
векторы a |
= |
и b |
||||
|
|
|
|
− 2 |
|
|
|
|
|
|
|
|
|
2
=q коллинеарны.
−1
Решение |
|
|
|
|
|
|
|
|
|
|
|
|
|
Из условия коллинеарности векторов следует |
p |
= |
1 |
= |
− 2 |
= 2 или |
p |
= 2, |
1 |
= 2 а тогда |
|||
2 |
q |
−1 |
2 |
q |
|||||||||
|
|
|
|
|
|
|
|
||||||
p = 4, q = |
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
1.3.4. Проекция вектора на числовую ось. Декартова система координат. Линейные операции над векторами в R3 .
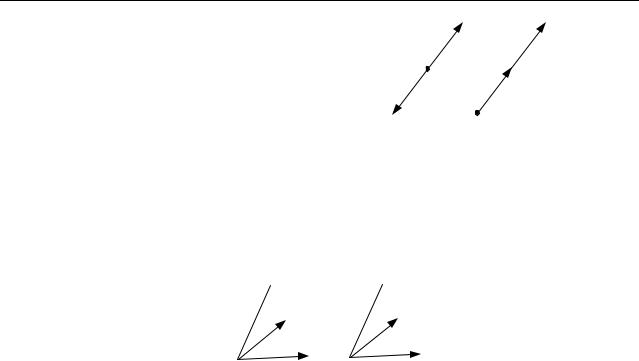
Рассмотрим числовую ось Ox и вектор (направленный отрезок) AB (рис. 1.3.1). Проекцией вектора на числовую ось называют длину отрезка этой оси между проекциями конечной и начальной точек вектора на ось, если вектор и ось направлены в одну сторону. Если вектор и ось направлены в разные стороны, то проекцией вектора на ось называется длина отрезка оси между проекциями конечной и начальной точек вектора, взятая со знаком минус (рис. 1.3.1).
B B
A

 A
A
_____
O 123
123
_____
x O 123
123
ПрOx AB >0 |
ПрOx AB <0 |
Рис. 1.3.1.
В трехмерном пространствеR3 , являющемся частным случаем конечномерного векторного пространства Rn , введем прямоугольную декартову систему координат.
r |
|
1 |
|
r |
|
0 |
r |
|
0 |
|
|
|
0 |
|
|
1 |
|
|
0 |
|
|||
Для этого векторы i |
= |
, |
j |
= |
|
и k |
= |
, образующие в пространстве R3 базис, |
|||
|
|
0 |
|
|
|
0 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||
изобразим взаимно перпендикулярными отрезками единичной длины, направленными вдоль координатных осей Ox, Oy, Oz соответственно. Тогда вектор a = xir+ yrj + zk пространства R3 ,
разложенный по этому базису, можно изображать отрезком OM с началом в начале координат и с M (x, y, z) (рис.1.3.2). Координаты вектора a в такой системе координат являются
проекциями OM или точки M на координатные оси.
77

z
|
zi |
M |
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
a |
|
|
|
k |
|
|
|
i |
O |
j |
yj |
|
|
|
y |
||
|
|
|||
|
|
|
||
xiv |
|
|
|
|
x |
|
|
|
|
|
|
Рис.1.3.2. |
|
|
ЗАМЕЧАНИЕ |
|
|
|
|
Для векторов из пространства R3 часто используют |
обозначение: a = {x; y; z}, где x, y, z - |
|||
координаты вектора.
Начало направленного отрезка, являющегося изображением вектора a может параллельным переносом помещаться в любую точку пространства. Проекции вектора на координатные оси при этом не изменятся. Если начало направленного отрезка в точке A(x1; y1; z1), а конец в точке B(x2; y2; z2 ), то соответствующий вектор ar = AB = {x2 − x1; y2 − y1; z2 − z1}(рис. 1.3.3)
z  z2
z2
z1 A B
A B
O |
y1 |
y2 |
x1 |
|
y |
x2
x
Рис. 1.3.3.
В следующей таблице собраны формулы для нахождения координат линейных операций над
векторами трехмерного пространства R3 .
Сложение
|
r |
x |
x |
|
|
x |
+ x |
|
|
|||
ar |
1 |
|
2 |
|
1 |
|
2 |
|
||||
+b |
= y1 |
|
+ y2 |
|
= y1 + y2 |
. |
||||||
|
|
z |
z |
2 |
|
z |
+ z |
2 |
|
|||
|
|
1 |
|
|
|
1 |
|
|
||||
Вычитание |
|
|
|
|
|
|
|
|
|
|
||
|
r |
x |
|
x |
|
x |
− x |
2 |
|
|||
ar |
1 |
|
|
|
2 |
|
1 |
|
|
|
||
−b |
= y1 |
− y2 |
|
= y1 − y2 |
|
|||||||
|
|
z |
|
z |
2 |
|
z |
− z |
2 |
|
||
|
|
1 |
|
|
|
|
1 |
|
|
|
||
r |
|
|
|
|
|
|
|
a |
r |
+b |
|
|
|
b |
r |
|
a |
|
a |
|
|||
|
|
|
|
r |
|
|
|
|
|
r |
|
|
r |
r |
|
|
|
b |
|
|
|
||
|
|
|
|
|
a |
+b |
|
|
|
|
|
r |
|
|
|
|
|
|
|
a |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
b |
|
|
|
|
|
r |
− |
|
|
|
|
|
b |
|
a |
|
|
|
|
|
|
|
|
|
|
|
78
|
Умножение на число |
|
|
|
|
|
|
λ ar |
λ ar |
|
||
|
|
|
|
|
|
|
|
|||||
|
r |
x |
|
|
λ x |
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
λa |
= λ y1 |
|
= |
λ y1 |
. |
|
|
λ < 0 |
|
|
|
|
|
|
|
|
|
|
|
|
O |
r λ > 0 |
|
|
|
|
z1 |
|
λ z1 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
a |
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Базис в пространстве |
R 3 |
образуют |
любые три линейно независимых |
(некомпланарных) |
|||||||
вектора.
Тройка некомпланарных векторов называется правой (базисом с правой ориентацией), если из конца третьего вектора вращение от первого к второму происходит против часовой стрелки.
Если из конца третьего вектора вращение от первого к второму происходит по часовой стрелке, то тройка некомпланарных векторов называется левой (базисом в правой ориентацией)
На рисунке 1.3.4 a тройка векторов ar, b, cr – правая, а на рисунке 1.3.4 b – левая.
c c
c
b |
a |
|
|
a |
b |
|
|
Рис. 1.3.4 a. |
Рис. 1.3.4 b. |
ЗАМЕЧАНИЕ 1 |
|
Из рисунка 1.3.3 ясно, что тройка векторов i , j, k |
правая, а показанная на этом рисунке система |
координат (поворот от одной оси к последующей, |
от Ox к Oy , от Oy к Oz и от Oz к Ox . |
происходит против часовой стрелки) задает правую ориентацию пространства.
79