

9.5. Измерение угловых координат
Рассмотрим методы получения информации об угловом положении объекта с помощью измерения параметров сигналов, излучённых или отражённых объектом. Измерение углового положения объектов основывается на кодировании направлений в реальном пространстве или кодировании координат двухмерного изображения объекта. Если объект облучается с помощью источника света по направлениям φ11…φmn, то лучи, идущие в двух смежных направлениях должны отличаться числовым значением какого-либо параметра излучения, например, частотой несущего или модулирующего колебания. При последовательном облучении узким лучом отдельные направления могут быть дифференцированы по моменту облучения, например, направлению φ11 соответствует момент t11, а направлению φ12 – момент t12.
Аналогично кодированию направлений в пространстве объекта можно произвести кодирование координат в плоскости изображения. При этом любое направление в пространстве объекта φij может быть связано с соответствующей координатой изображения iij. Каждой координате сформированного изображения приписывают определённое числовое значение одного или двух параметров сигнала.
Кодирование направлений в пространстве объекта осуществляется только в активных оптико-локационных системах, а кодирование координат изображения – как в активных, так и в пассивных системах. Формирование изображения для кодирования координат обязательно. Воспроизведение изображения зависит от возможностей применённого кодирования и от конкретных требований к системе.

Рис.9.38. Кодирование точек изображения с помощью углов наблюдения и числовых значений некоторого параметра, например, время
9.5.1. Система кодирования без воспроизведения изображения
Одна из схем с кодированием направлений в пространстве объекта содержит два канала с лазерными лучами, оптические оси которых O1 и О2 лежат в плоскости перемещения цели, рис. (9.39). Эта система может применяться для сопровождения целей, перемещающихся по земной или водной поверхности.
Излучение лазеров 1 и 2 формируются оптическими системами 3 и 4. Угол Δφ между оптическими осями O1 и О2 устанавливают равным углу расходимости излучения лазеров с тем, чтобы на цели Ц сечения лучей С1 и С2 имели одинаковый поперечник и соприкасались или частично перекрывались. Накачка обоих лазеров производится от генератора 5. Лазеры дают излучение на длинах волн λ1=0,69 мкм (рубин) и λ2=1,06 мкм (стекло с неодимом).
Отражённое излучение принимается оптическими системами 6 и 7 и после прохождения через узкополосные фильтры 8 и 9 попадает на фотоприёмники 10 и 11. После усиления в усилителях 12 и 13 сигналы поступают на схему формирования сигнала ошибки 14, величина которого определяется разностью выходных сигналов усилителей 12 и 13. Сигнал ошибки используется для управления угловым положением оптических осей O1 и О2, устанавливаемых платформой 15 так, чтобы площади сечения С1 и С2 цели Ц лучами O1 и О2 были равны между собой (аналогия с равносигнальным направлением РЛС).
При временном кодировании направлений в пространстве каждому угловому положению соответствует определённый интервал времени относительно некоторого начального момента. При простом сканировании лазерным лучом перемещение луча происходит быстро, за время сравнимое с запаздыванием излучения (при распространении света до цели и обратно). В связи с этим необходимо учитывать дальность до цели. Избежать этого можно за счёт:
– увеличения времени сканирования,
– сканирования по спиральной траектории, начиная с осевого положения и до максимального отклонения θm.
Положение Ц описывается углами θц, отсчитываемыми от осевого направления, и азимутальным углом φц. От максимального отклонения луч по спирали возвращается к осевому положению. В моменты прохождения цели лазерное излучение будет ею отражено и за период сканирования импульсы, отраженные от цели, будут получены фотоприёмником дважды.
+
Рис.9.39. 1 и 2 –лазеры, 3,4 – оптические системы, 5 – генератор накачки лазеров, 6,7 – приемные оптические системы, 8,9 – узкополосные фильтры, 10,11 –фотоприемники, 12,13 – усилители, 14 – схема формирования сигнала ошибки
Отклоняющие лазерный луч напряжения имеют пилообразную форму (рис.9.40). В соответствии с этим рисунком угловое положение цели может быть описано выражениями.
 (9.14)
(9.14)
fm – частота модуляции отклоняющих воздействий (fm ~ 1 кГц),
fС – частота сканирования,
θm – угол максимального отклонения в радиальном направлении, tц – интервал времени сканирования луча от осевого положения (θ = 0) до пересечения с целью.
Для определения углового положения цели достаточно измерить интервал времени Δt между принятыми импульсами. Согласно рис.9.40
 (9.15)
(9.15)

Рис.9.40. θm – максимальное отклонение от оси, θц –отклонение цели от осевого направления, tц - время сканирования цели, fм –частота модуляции, Δt – интервал времени между импульсами, отраженными от цели при прямом и обратном движении
зондирующего луча
подставив tц , полученное из соотношения (9.15), в (9.14), найдем
 (9.16)
(9.16)
Рассмотрим методы определения угловых координат, использующие кодирование координат сформированного изображения.
На рис.9.41 приведена схема системы сопровождения объектов, на которых установлен рефлектор.
Излучение лазера 1, отражённое призмой 2 и сформированное телескопической системой 3, после отражения от цели принимается той же телескопической системой 3 и после прохождения через фильтр 4 фокусируется на модулирующем фильтре 5. Модулирующий фильтр (диск) с помощью привода 6 вращается вокруг оси, перпендикулярной плоскости фильтра. Модуляция достигается тем, что лишь одна половина диска отражает зеркально. Если изображение цели сфокусировано в центре зеркала, то отражённое излучение не меняется. Если изображение ретрорефлектора смещено относительно центра, отражённое излучение имеет переменную составляющую, фаза которой будет зависеть

Рис.9.41. 1 – лазер, 2 – призма, 3 – телескопическая система, 4 – фильтр переменного пропускания, 5 –фазово-модулирующий фильтр, 6 –привод, 7 – фотоприёмник, 8,11 – усилители, 9 – источник света, 10 – фотодиод, 12 – фазосдвигающая на 90º цепь, 13, 14 – фазовые детекторы
от смещения изображения по азимуту и углу возвышения. Сигнал с выхода фотоприёмника 7 после усилителя 8 поступает на входы фазовых детекторов 13 и 14. Опорные напряжения для них формируются фотодиодом 10, принимающим излучение вспомогательного источника 9, отражённое зеркалом 5. После усиления опорный сигнал расщепляется на два канала, в одном из них получает дополнительный фазовый сдвиг на 90º (в фазосдвигающей цепи 12). Сигналы ошибки с выходов фазовых детекторов 13,14 используются для управления пространственным положением платформы, на которой установлена оптико-электронная часть системы.
Перед фильтром 5 установлен неподвижный фильтр 4, пропускание которого T увеличивается к краям. Он представляет собой микроплёнку с неравномерно нанесёнными на неё чёрными точками. Благодаря этому получаются линейные зависимости между угловым смещением цели и величиной сигнала ошибки, а также полная развязка между каналами управления по азимуту и углу возвышения.
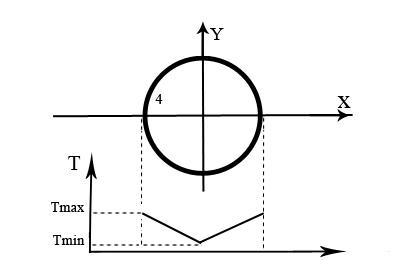
Рис.9.42. Т –коэффициент пропускания фильтра
Система с кодированием координат изображения, основанная на временном принципе приведена на рис.9.43. Информация о цели считывается путём сканирования по таким направлениям, которые обеспечивают наибольшее отклонение цели от осевого направления при достаточном быстродействии.
В системе, использующей крестообразную развёртку, управление направлением на цель производится управляемым зеркалом 6, общим для передающего и приёмного каналов. Передающий канал содержит лазер – 1, электрооптический модулятор – 2, формирующую оптическую систему - 3, зеркала – 4,5,6. Приёмный канал – зеркало – 6, параболическое зеркало – 7, зеркало – 8, интерференционный фильтр – 9, диссектор – 10, блок формирования сигнала ошибки – 11, привод управляемого зеркала – 12.
Пусть изображение цели, имеющее форму круга, занимает часть площади фотокатода. Считывающий луч, движется по крестообразной траектории, что обеспечивается с помощью треугольных напряжений: а) по вертикали, б) по горизонтали.
Если направление на цель совпадает с центром крестообразной траектории, то сумма длительностей импульсов, возникающих на фотокатоде при сканировании по вертикали и горизонтали: соответственно, вверх–вниз, влево–вправо, одинаковы (случай в)

Рис.9.43. 1-лазер, 2- электрооптический модулятор, 3 – формирующая оптическая система, 4,5,6,7,8 – зеркала, 9 – интерференционный фильтр, 10- диссектор, 11 – блок формирования сигнала ошибки, 12 – привод управляемого зеркала

Рис.9.44

Рис.9.45
При смещении изображения цели влево от центра сумма длительностей импульсов левой ветви больше суммы длительностей правой ветви (Рис.9.46).
Аналогичные изменения длительностей импульсов происходят при смещении изображения по вертикали. Эти изменения длительностей используются в блоке 11 для формирования сигналов ошибки в двух плоскостях (горизонтальной и вертикальной) для управления положением зеркала 6.

Рис.9.46
Для сопровождения протяжённых целей произвольной формы применяют системы с кольцевой траекторией сканирования, а для сопровождения кооперированных (групповых) целей – квадрантные приёмники.