

ТМ задания
.pdfТаблица Д7 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Номер |
m1 |
m2 |
m3 |
m4 |
m5 |
c1 |
c2 |
c3 |
|
условия |
|||||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
0 |
12 |
16 |
- |
8 |
- |
1200 |
- |
- |
|
|
|
|
|
|
|
|
|
|
|
1 |
10 |
8 |
4 |
- |
- |
- |
- |
1000 |
|
|
|
|
|
|
|
|
|
|
|
2 |
16 |
12 |
- |
- |
6 |
- |
800 |
- |
|
|
|
|
|
|
|
|
|
|
|
3 |
20 |
- |
- |
6 |
- |
1500 |
- |
- |
|
|
|
|
|
|
|
|
|
|
|
4 |
- |
18 |
- |
- |
4 |
- |
1000 |
- |
|
|
|
|
|
|
|
|
|
|
|
5 |
18 |
14 |
6 |
- |
- |
1000 |
- |
- |
|
|
|
|
|
|
|
|
|
|
|
6 |
12 |
- |
8 |
4 |
- |
- |
- |
1200 |
|
|
|
|
|
|
|
|
|
|
|
7 |
16 |
10 |
- |
- |
4 |
800 |
- |
- |
|
|
|
|
|
|
|
|
|
|
|
8 |
20 |
16 |
- |
8 |
- |
- |
1200 |
- |
|
|
|
|
|
|
|
|
|
|
|
9 |
10 |
- |
6 |
4 |
- |
1000 |
- |
|
|
|
|
|
|
|
|
|
|
|
|
Втабл. Д7 заданы массы mi тел (кг) и коэффициенты жесткости сi пружин (Н/м). Прочерки в столбцах таблицы означают, что соответствующие тела или пружины в систему не входят (на чертеже эти тела и пружины не изображать); в результате в каждом конкретном варианте получается довольно простой механизм, содержащий три или даже два тела. Стержень 6 или 7 входит в состав механизма, когда в него входят оба тела, соединенные этим стержнем.
Вположениях, изображенных на рисунках, механизм находится в равновесии.
Определить частоту и период малых колебаний системы около положения равновесия. Найти также, чему равно статическое удлинение (сжатие) пружины λCT в
положении равновесия.
При подсчетах считать колеса 1 и 2 сплошными однородными цилиндрами радиусов R1 и R2 соответственно.
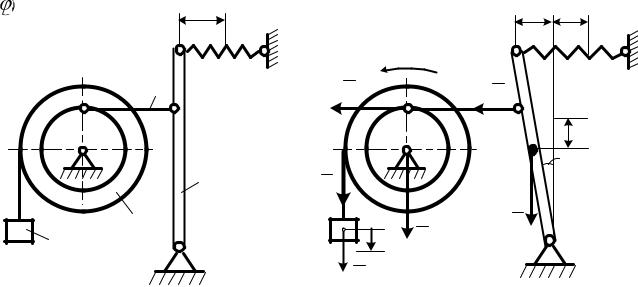
Пример Д7. Находящаяся в равновесии механическая система состоит из вертикального стержня 1 длиной l1 =1,2 м, ступенчатого колеса 2 с радиусами R2 = 0,4 м, r2 =0,2 м и груза 3, подвешенного к нити, намотанной на колесо. На
стержне расстояние O B = |
2l |
(рис. Д7.а). Стержень 1 соединен с колесом |
2 невесомым |
|
|
||||
1 |
3 |
|
|
|
|
|
|
|
|
стержнем 4. К стержню |
прикреплена пружина |
с коэффициентом жесткости |
||
с = 1200Н/м. Массы тел соответственно равны: m1= 8 |
кг, m2= 12 кг, m3= 4 |
кг. |
||
Определить: частоту и период малых колебаний системы около положения равновесия. Найти также, чему равно статическое удлинение (сжатие) пружины λCT в
положении равновесия. При вычислении момента инерции колесо считать сплошным однородным цилиндром радиуса R2.
Решение. Рассмотрим произвольное положение системы, когда она выведена из положения равновесия и совершает малые колебания (рис. Д7.б).
51
a) |
б) |
|
Рис. Д7 |
Система |
имеет одну степень свободы. Выберем в качестве обобщенной |
координаты угол ϕ отклонения стержня от вертикали, считая ϕ малым, и составим для системы уравнение Лагранжа. Так как все действующие силы потенциальны, выразим обобщенную силу Q через потенциальную энергию П системы:
d |
æ |
¶T |
ö |
|
¶T |
= Q , где Q = - ∂П . |
(1) |
|
ç |
÷ |
- |
||||||
|
|
|
||||||
|
ç |
|
÷ |
|
¶ϕ |
¶ϕ |
|
|
dt è |
¶ϕ& ø |
|
|
|||||
Определим кинетическую энергию системы, равную сумме кинетических
энергий тел системы: |
|
Т=T1+T2+T3 . |
(2) |
Так как стержень 1 и колесо 2 вращаются, а тело 3 движется поступательно, то
|
I w2 |
|
|
I w2 |
|
2 |
|
||||
T = |
1 1 |
, T = |
2 2 |
, Т3 = m3 v3 |
/ 2. |
||||||
|
|
|
|||||||||
1 |
2 |
|
2 |
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
Моменты инерции стержня и колеса равны |
|
|
|
||||||||
|
|
|
|
m e2 |
m |
R2 |
|
||||
|
I1 = |
|
1 |
|
, I2 = |
2 |
2 |
. |
|
||
|
3 |
|
2 |
|
|||||||
|
|
|
|
|
|
|
|
||||
Значения w2 , v3 выразим через обобщенную скорость w1 = ϕ& :
w2 |
= |
vD |
= |
vB |
= |
O1B ×ϕ& |
= |
|
2lϕ& |
||||
r2 |
r2 |
|
r2 |
|
3r2 |
||||||||
|
|
|
|
|
|
|
|
||||||
v |
2 |
= v |
E |
= w × R = |
2lR2ϕ& |
. |
|||||||
|
|||||||||||||
|
|
|
|
2 |
|
2 |
|
3r2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
52 |
|
|
|
|
|
|
(3)
(4)
(5)
Подставляя значения (4), (5) в равенства (3), а затем в (2) окончательно получим:
T = aϕ&2 , где a = |
æ m |
|
|
4 |
|
|
8 |
|
ö |
|
||||
ç |
1 |
+ |
|
m2 |
+ |
|
|
m3 |
÷e2 |
|
||||
|
9 |
9 |
|
|||||||||||
|
|
|
è |
6 |
|
|
|
|
|
ø |
|
|||
|
æ |
¶T |
ö |
|
|
|
|
|
|
|
|
|
||
∂T = 2aϕ& , |
d |
ç |
÷ |
= 2aϕ&&, |
∂T = 0 . |
(6) |
||||||||
|
|
|
||||||||||||
¶ϕ& |
ç |
¶ϕ& |
÷ |
|
|
|
|
¶ϕ |
|
|
||||
dt è |
ø |
|
|
|
|
|
|
|||||||
Определим потенциальную энергию системы, которая определяется как работа
сил тяжести и силы упругости пружины на перемещении системы из смещенного положения в положение равновесия.
П=П1+П3+Ппр
П1= - Р1h – потенциальная энергия стержня 1, h – вертикальное смещение центра тяжести С1 стержня.
|
|
|
|
|
|
|
|
|
h = |
l |
− |
l |
cosϕ = |
l |
(1 − cosϕ ). |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
2 |
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Разложим |
|
cosϕ |
в |
|
степенной |
ряд cosϕ = 1- ϕ 2 + |
ϕ 4 |
+ ... |
|
и, |
ограничиваясь в |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2! |
4! |
|
lϕ |
|
|
|
|
|||||||
формуле разложения |
двумя первыми членами, имеем |
h = |
2 |
. |
Соответственно |
||||||||||||||||||||||||
|
4 |
|
|||||||||||||||||||||||||||
|
|
|
lϕ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П |
1 |
= -m g |
, П |
3 |
= -P × S |
3 |
- потенциальная энергия груза 3. |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
1 |
4 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Между перемещениями точек приложения сил существует такая же |
|||||||||||||||||||||||||||
зависимость, как и между их скоростями S3 = |
2lR2 |
ϕ . Поэтому П3 |
= - |
2m3 glR2ϕ |
. |
||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3r2 |
|
|
|
|
|
|
3r2 |
|||||
|
|
Потенциальная энергия деформированной пружины при указанном |
|||||||||||||||||||||||||||
перемещении системы равна: |
|
|
|
|
|
|
|
|
|
cλCT2 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
Ппр |
= |
c |
|
(λCT + SA )2 - |
, |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|||||||
где λCT - статическая деформация пружины, SA – перемещение точки А прикрепления пружины, соответствующее координате ϕ : SA = lϕ . Поэтому
Ппр = |
c |
(λCT + lϕ )2 - |
cλCT2 |
|
= clϕλCT + |
c |
l 2ϕ 2 . |
|
||||||||||||
|
|
2 |
|
|||||||||||||||||
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|||||
Потенциальная энергия системы |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
П = -m g |
lϕ 2 |
|
- |
2m glR ϕ |
+ clϕλ + |
|
c |
l2ϕ 2 |
|
|||||||||||
|
|
|
|
|
3 2 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
1 |
|
4 |
|
|
|
|
3r2 |
|
CT |
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Q = - ¶П |
= |
m1 glϕ |
+ |
|
2m3 glR2 |
- clλCT - cl 2ϕ . |
(7) |
|||||||||||||
|
|
|||||||||||||||||||
¶ϕ |
|
|
|
2 |
|
|
|
|
3r2 |
|
|
|
|
|
|
|
||||
53

В положении равновесия системы, т. е. при ϕ = 0 , Q=0
|
|
|
|
|
Q |
|
|
|
= |
2m3 glR2 |
|
|
- clλ |
CT |
= 0 . |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
ϕ =0 |
|
|
|
|
|
|
3r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2m3 glR2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
λCT = |
. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3r2cl |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Значение обобщенной силы Q (7) с учетом уравнения (8) имеет вид: |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¶П |
|
|
|
|
æ m gl |
|
|
|
|
|
|
|
ö |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
Q = - |
¶ϕ |
= ç |
|
|
1 |
|
|
|
|
- cl2 ÷ϕ |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|
||||||||||
Подставляем выражения (6) и (10) в (1): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
æ m |
|
4 |
|
|
|
|
|
8 |
|
|
|
|
ö |
|
|
|
|
|
|
|
|
|
|
æ m gl |
|
|
|
|
ö |
|
|
|
|
||||||||||||||||
2ç |
|
1 |
|
+ |
|
|
|
m |
|
|
+ |
|
|
|
|
m |
÷e |
2ϕ&& |
= |
|
ç |
|
|
|
1 |
|
|
|
|
- cl2 |
÷ϕ |
|
|
|
|||||||||||||||
|
6 |
|
9 |
|
|
|
9 |
|
|
|
|
|
2 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||
è |
|
|
|
|
|
2 |
|
|
|
3 |
ø |
|
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
|
|
|
|
|
|
ø |
|
|
|
|
||||||||||||
æ m |
|
4 |
|
|
|
|
8 |
|
|
|
ö |
|
|
|
|
|
|
æ |
|
|
|
|
|
|
|
|
m gl |
ö |
|
|
|
|
|
|
|||||||||||||||
2l 2 ç |
1 |
+ |
|
|
|
m |
|
+ |
|
|
|
|
m |
|
÷ϕ&&+ |
çcl2 |
- |
|
|
|
|
1 |
|
÷ϕ = 0 |
|
|
|||||||||||||||||||||||
|
9 |
|
9 |
|
|
|
2 |
|
|
|
|||||||||||||||||||||||||||||||||||||||
è |
6 |
|
|
|
|
2 |
|
|
3 |
ø |
|
|
|
|
|
|
è |
|
|
|
|
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
cl2 - |
m1 gl |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
ϕ&&+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ = 0 |
|
|
|
|
|
||||||||||||
|
|
|
2l 2 |
æ m |
|
|
+ |
4 |
|
m |
|
+ |
8 |
m |
|
ö |
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
ç |
1 |
|
|
|
|
|
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
9 |
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
è |
6 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
3 |
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cl2 - |
m1 gl |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
ϕ&&+ k 2ϕ = 0, где k 2 = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
. |
||||||||||||||||||||||
|
|
|
|
æ m |
|
|
|
|
4 |
|
|
|
|
|
8 |
|
|
ö |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2l |
2 ç |
|
|
1 |
|
+ |
|
|
|
|
m |
2 |
+ |
|
|
m |
3 |
÷ |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
9 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
ø |
|
|||||||||
(8)
(9)
(10)
(11)
Из теории колебаний известно, что когда уравнение приведено к виду (11), то в нем величина k является искомой круговой частотой, а период T = 2kπ . При заданных
числовых значениях, произведя соответствующие расчеты, получим из (11) и (9)
следующие ответы: k=7,56 c-1, T = 0,83 c, λCT = 0,043 м = 4,3 см.
54
CПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1 Бать, М.Н. Теоретическая механика в примерах и задачах. Ч. 1,2 - М, 1961 и последующие издания.
2 Гернет, М.М. Курс теоретической механики. - М, 1970 и последующие издания.
3 Тарг, С.М. Краткий курс теоретической механики. - М, 1963 и последующие издания.
4 Яблонский, А.А. Курс теоретической механики. Ч. 1,2 - М, 1962 и последующие издания.
5 Сборник задач для курсовых работ по теоретической механике / Под ред. А.А. Яблонского М, 1972 и последующие издания (содержит примеры решения задач).
55
ПРИКЛАДНАЯ МЕХАНИКА Раздел «Теоретическая механика»
Методические указания и контрольные задания к выполнению расчётно-графических работ и контрольной работы №1 по дисциплине «Прикладная механика» для студентов специальности АТПП и
технологических специальностей дневной и заочной формы обучения
Составители |
Тамара Дмитриевна Куксенкова |
|
Виталий Геннадьевич Харкевич |
Редактор |
Татьяна Леонидовна Матеуш |
Технический редактор |
Анна Аполлинариевна Щербакова |
Подписано в печать |
Формат 60 40 1/16. |
|
трафаретная. |
Бумага офсетная. Гарнитура Таймс. Печать × |
|
Усл. печ. л. |
Уч.-изд. л. |
Тираж |
экз. Заказ |
Отпечатано на ризографе редакционно-издательского отдела
учреждения образования «Могилёвский государственный университет продовольствия».
212027, Могилёв, пр-т Шмидта, 3.
ЛИ № 02330/0131913 от 08.02.2007.