

ТМ задания
.pdfПример Д2. Груз массой , прикрепленный к двум последовательно соединенным пружинам с коэффициентами жесткости c1 и c2 , перемещается относительно лифта. Лифт движется вертикально по закону x1 = f1 (t) (рис. Д2, а). Начальное удлинение пружины с эквивалентной жесткостью равноλ0 , а начальная скорость груза по отношению к лифту .
Дано: |
= 0,5 кг, |
= 240 Н/м, = 120 Н/м, λ0 =0,12 м, = 0,8 м/с. |
||
= 2 |
+ 0,4 |
|
|
. |
Определить: |
x |
= (2f (t)- закон движения груза по отношению к лифту. |
||
|
|
|
) |
|
C1 |
|
|
C 2 |
Fy |
|
λu |
||
|
||
O |
Fy x |
|
|
P |
|
|
Fпери |
|
|
x |
|
|
P |
|
a) |
б) |
Рис. Д.2
Решение. Заменим прикрепленные к грузу пружины одной эквивалентной пружиной с коэффициентом жесткости эк = . При последовательном соединении пружин
жесткость эквивалентной пружины
c = |
c1 × c2 |
= 80 Н/м (2) |
|||
c |
+ c |
2 |
|||
|
|
||||
|
1 |
|
|
||
Составим дифференциальное уравнение относительного движения груза.
В положении статического равновесия груза эквивалентная пружина под действием силы тяжести P будет растянута на величину λСТ . Из условия равновесия следует, что åFix = 0 , P - Fy = 0 , mg - cλСТ = 0
λСТ = mgc = 0,06 м (3)
Начало координат поместим в положении статического равновесия груза, а ось направим в сторону удлинения пружины. Рассмотрим груз в произвольном положении, определяемом координатой >0 и изобразим действующие на него силы: силу тяжести , силу упругости Fy . Присоединим к этим силам переносную силу
инерции Fпери = −maпер . Тогда уравнение относительного движения в векторной форме будет иметь вид:
31

maотн = P + Fy + Fпери
Проектируя обе его части на ось |
|
, получим: |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m&x& = P − F |
y |
+ F и |
(4) |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пер |
|
|
|
|
|
|
|
||
Найдем значения |
|
|
|
и |
|
и |
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
F |
y |
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
пер |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
F |
y |
= c(x + λ |
СТ |
) , |
|
F и |
|
= ma |
пер |
= m&x& , |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пер |
|
|
|
|
1 |
|
|
|
|||||
где &x&1 - ускорение лифта. Из равенства (1) находим, что &x&1 |
= 4 −1,6cos(2t) . Подставляя |
|||||||||||||||||||||||||||||||||
все эти величины в уравнение (4), получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
m&x& = mg − c(x + λСТ ) + m[4 −1,6cos(2t)] |
|
|
|
||||||||||||||||||||||
Т. к. mg − cλСТ = 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
&x&+ |
c |
x = 4 −1,6cos(2t) . |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Обозначим k 2 = |
c |
|
= 160 с-2, |
= 4 м/с2, |
|
= |
1,6 м/с2. |
|
|
|
|
|
|
|
||||||||||||||||||||
m |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Тогда &x&+ k 2 x = a + bcos(2t) (5) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Проинтегрируем уравнение (5). Его общим решением будет |
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x = x1 + x2 |
(6) |
|
|
|
|
|
|
|
|
|||||||||
где x1 - решение однородного уравнения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
( |
|
|
) |
+ |
|
|
|
( |
|
) |
(7) |
|
|
|
|
|||
а x2 - частное решение уравнения (5) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
x2 = A + Bcos2t (8) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Для определения постоянных |
|
и |
|
|
|
|
находим |
|
|
= |
|
4 |
|
. Подставляем |
||||||||||||||||||||
значения x |
2 |
и |
&x& |
в уравнение (5) |
|
|
|
|
|
|
|
|
|
|
|
|
|
в его обеих частях свободные |
||||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
и приравниваем ̈ |
|
− |
|
2 |
|
||||||||||||||
члены и коэффициенты при cos2t. В результате, принимая во внимание соответствующие обозначения, получим:
A = |
a |
= 0,02 м, B = |
b |
= −0,01 м. |
|
k 2 |
k 2 − 4 |
||||
|
|
|
Тогда из равенств (6), (7) и (8), учитывая k = 12,6 с-1, получим следующее общее решение уравнения (5)
x = c1 sin(12,6t) + c2 cos(12,6t) − 0,01cos(2t) + 0,02 (9)
Для определения постоянных интегрирования c1 и c2 найдем еще vx = x&
vx = 12,6c1 cos(12,6t) −12,6c2 sin(12,6t) + 0,02sin(2t) (10)
Из условия задачи при = 0. v0 = 0,8 м/с, x0 = λ0 − λСТ = 0,06 м.
Подставив эти начальные данные в уравнение (9) и (10), найдем из них, что c1 = 0,06 , c2 = 0,05 . В результате уравнение (9) примет вид:
x = 0,06 sin(12,6t) + 0,05 cos(12,6t) − 0,01cos( 2t) + 0,02
Это уравнение и определяет искомый закон относительного движения груза, т. е. закон совершаемых им колебаний.
32

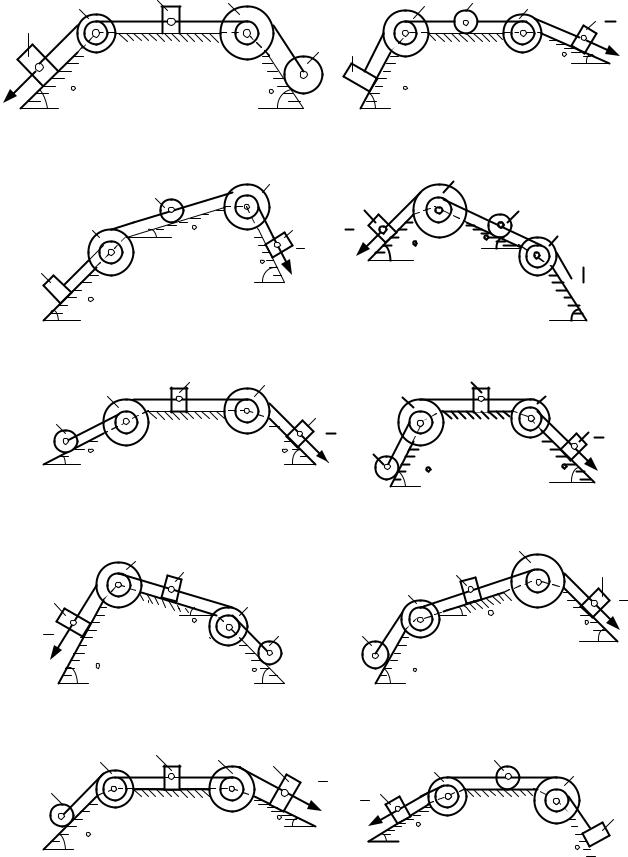
Задача Д3
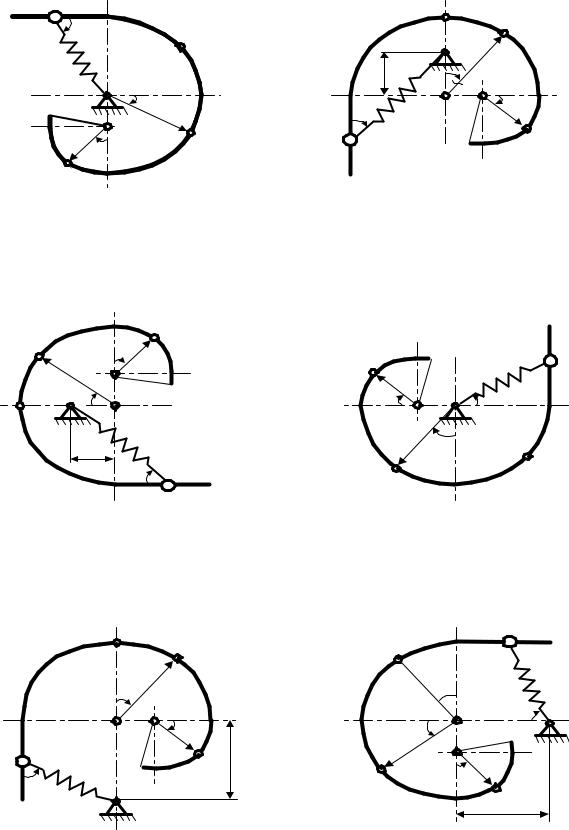
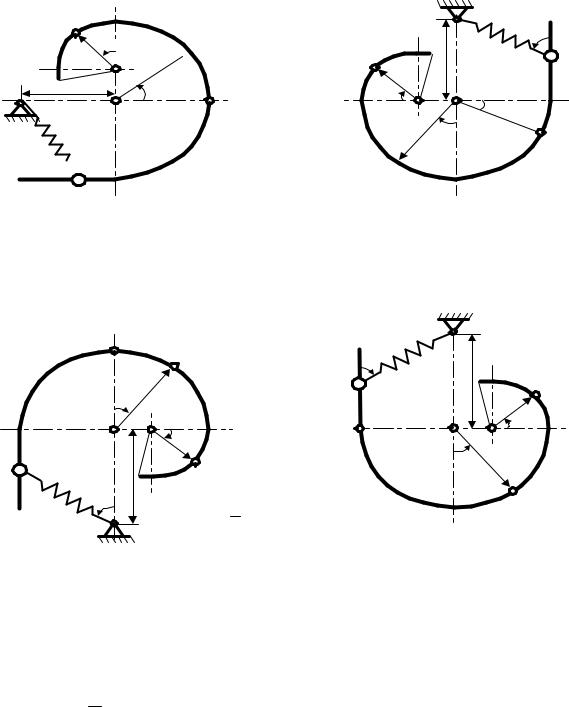
Тонкий гладкий стержень, расположенный в вертикальной плоскости, изогнут так, что состоит из прямолинейного участка и двух дуг окружностей радиуса R = 0,5 м, r = 0,6R, сопряженных в точке (рис. ДЗ.0 - Д3.9, табл. ДЗ). На стержень
нанизан шар весом P, прикрепленный к пружине с коэффициентом жесткости c = k PR ,
другой конец пружины закреплен в точке О. Длина пружины в недеформированном состоянии равна l0 . Шар начинает двигаться без начальной скорости из положения
B0 , определяемого углом α (при α = 90° считать шар чуть смещенным от равновесного положения); достигнув точки B1 , указанной на рисунке, шар
освобождается от пружины и дальше движется под действием только силы тяжести. Считая шар материальной точкой, определить, какую скорость он будет иметь, придя в точку D, и с какой силой будет давить на стержень в этой точке (силу давления выразить через вес Р шара). Положение точки D, когда она находится на дуге радиуса R, определяется углом β , а на дуге радиуса r - углом . На рис. 0 и 3 B1 произвольная
точка дуги ED.
Указания. Задача ДЗ - на применение теоремы об изменении кинетической энергии точки. Решая задачу, учесть, что теорему можно применить сразу на всем перемещении, совершаемом шаром от начального положения до положения, в котором надо определить его скорость. Когда скорость будет найдена, для определения силы давления шара на стержень изобразить шар в том положении, в котором эту силу надо определить, и составить уравнение движения в проекции на нормаль к траектории, направленную к центру соответствующей окружности, т. е.
уравнение mv2 / ρ = åFkn .
Таблица Д3
№ |
|
|
Для рис. 0-3 |
|
|
|
|
Для рис. 4-9 |
|
|
||||
усл. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l0 |
k |
|
α 0 |
|
β 0 |
γ 0 |
l0 |
k |
|
α 0 |
|
β 0 |
γ 0 |
|
0 |
0,8R |
8 |
|
30 |
|
45 |
- |
2,8R |
8 |
|
45 |
|
60 |
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0,8R |
36 |
|
45 |
|
- |
60 |
2,4R |
6 |
|
90 |
|
- |
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
0,4R |
15 |
|
60 |
|
90 |
- |
2,2R |
12 |
|
60 |
|
30 |
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
0,7R |
6 |
|
30 |
|
- |
0 |
2,8R |
4 |
|
90 |
|
- |
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
0,6R |
12 |
|
45 |
|
90 |
- |
2,4R |
6 |
|
60 |
|
90 |
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
0,4R |
10 |
|
45 |
|
- |
30 |
2,6R |
10 |
|
45 |
|
- |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
0,7R |
50 |
|
60 |
|
30 |
- |
2,2R |
10 |
|
90 |
|
45 |
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
0,9R |
12 |
|
30 |
|
- |
90 |
2,5R |
8 |
|
60 |
|
- |
45 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
0,7R |
20 |
|
45 |
|
60 |
- |
2,6R |
5 |
|
90 |
|
60 |
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
0,6R |
30 |
|
60 |
|
- |
45 |
3R |
5 |
|
45 |
|
- |
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
33 |
|
|
|
|
|
|
|
B0 |
E |
|
|
|
B1 |
D |
|
α |
|
B1 |
|
|
O |
|
|
|
|
|
|
|
|
||
C |
O |
R |
/ 2 |
C |
β C1 |
γ |
K |
|
|
||||||
|
β R |
α |
|
|
r |
|
|
r |
C1 |
D |
|
|
|
|
D |
γ |
|
|
|
|
|||
B0 |
|
|
|
|
|||
D |
|
|
|
|
|
||
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Д3.0 |
|
|
Рис. Д3.1 |
|
|
||
|
|
|
|
|
|
||
|
|
K |
|
|
D |
|
|
|
|
|
|
D |
|
γ |
|
|
|
|
|
B0 |
|
|
C1 |
r |
|
|
D |
|
|
|||
|
R |
|
|
|
|
|
|
|||
B1 |
O β |
|
C |
|
|
K |
γ r |
O |
α |
E |
|
|
|
|
|
|
|
C1 |
|
C |
|
|
R / 2 |
|
|
|
|
R |
β |
|
B1 |
|
|
|
|
|
α |
B0 |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. Д3.2 |
Рис. Д3.3 |
|
B |
|
|
|
|
B0 |
|
1 |
|
D |
B1 |
|
|
|
|
|
|
|
||
|
β |
R |
|
|
30 0 |
α O |
|
|
C1 |
K |
|
C |
|
B0 |
C |
r |
γ |
β |
C |
|
|
|
D |
R |
1 |
|
|
α |
|
|
R |
γ |
r |
|
O |
|
|
D |
|||
|
|
|
|
|
D |
|
|
|
|
|
|
K |
R |
Рис. Д3.4 |
Рис. Д3.5 |
|
34
K
D
r γ  C1 R
C1 R  D
D
O |
R |
β |
B1 |
|
|
C |
|
α 
 B0
B0
Рис. Д3.6
B1
D
βR
C |
C1 |
γ r |
K |
|
|
B0 |
|
|
|
|
|
|
D |
|
|
||
|
|
|
|
||
α |
3R / 2 |
O |
= |
3 |
R |
O |
|
||||
|
C |
|
2 |
|
|
Рис. Д3.8
|
|
O |
|
|
|
α |
B0 |
D |
|
|
|
R |
|
|
|
K γ r |
|
|
|
|
C |
|
|
C1 |
|
300 |
|
R β |
|
B1 |
|
D
Рис. Д3.7
|
O |
OC = |
3 |
R |
|
|
|||
|
α |
3R / 2 |
2 |
|
B0 |
|
|
|
|
|
D |
|
||
B1 |
C |
rγ |
K |
|
|
β |
C1 |
|
|
|
R |
|
|
|
D
Рис. Д3.9
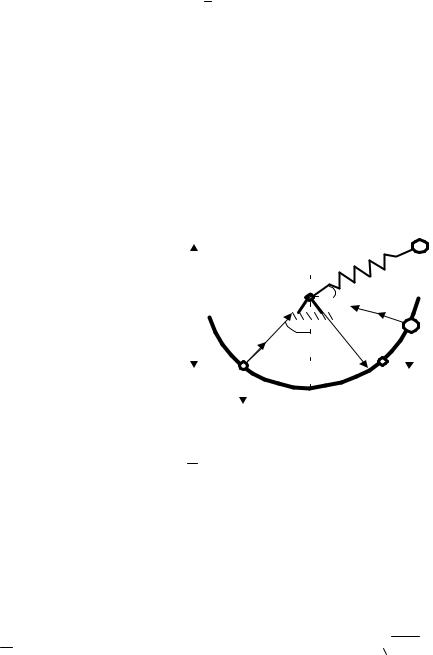
Пример Д3. Шар весом Р нанизан на расположенный в вертикальной плоскости гладкий стержень, который изогнут так, что состоит из прямолинейного участка и окружности радиуса R = 0,6 м. Шар прикреплен к пружине с коэффициентом
жесткости c = k PR . Другой конец пружины закреплен в точке О. Длина пружины в
недеформированном состоянии равна l0 . Шар начинает двигаться без начальной
скорости из положения В0, определяемого углом α ; достигнув точки В1, указанной на рисунке, шар освобождается от пружины и дальше движется под действием только силы тяжести. Считая шар материальной точкой, определить, какую скорость он будет иметь, придя в точку D, и с какой силой будет давить на стержень в этой точке (силу давления выразить через вес Р шара) .
Дано: Р, R = 0,6 м, l0 = 1,2R , c = k |
P |
, = 10, v0 = 0 , |
α = 60 0 |
, β = 300 . |
|
|
|||||
Определить: 1. |
|
R |
|
|
|
vD - скорость шара в точке D; |
|
|
|||
2. |
ND - силу давления шара на стержень в точке D. |
|
|||
35
Решение. |
Для |
определения |
|
v |
D |
|
рассмотрим |
|
шар в произвольном положении. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Изобразим действующие на него силы: |
|
|
|
|
|
|
(сила тяжести), |
|
|
|
|
(реакция стержня), |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
P |
F |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
N |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
(сила упругости пружины, действующая на участке |
B0 B1 ) |
|
и применим теорему об |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
изменении кинетической энергии точки на участке B0 D . |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
mv2 |
|
|
|
mvB2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
|||||||||||
|
|
|
|
|
|
|
- |
|
0 |
|
= A(P ) + A(N ) + A(F ) |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
A( |
|
) = 0 , |
т. |
к. сила |
|
|
|
|
перпендикулярна |
|
|
|
|
|
|
перемещению. A( |
|
) = P × h , |
где |
||||||||||||||||||||||||||||||||||||||||||||||||
N |
|
|
|
|
P |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
N |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
h = R × tgα + R cos β и A( |
|
) = 1,56P . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B 0 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B1 |
|
|
P |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Д3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Работа силы упругости F на перемещении B0 B1 определяется по формуле:
|
|
|
|
A( |
|
) = |
c |
(λ2 |
− λ2 ) = |
kP |
(λ2 |
− λ2 ) , |
|
(2) |
|||
|
|
|
F |
|
|||||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
2 |
0 |
1 |
2R |
0 |
1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где λ0 и λ1 - начальное и конечное удлинение пружины: |
|
|
|||||||||||||||
= O |
|
= |
|
|
1,2R = 0,8R; |
|
|
λ1 |
= OB1 − l0 |
= R −1,2R = −0,2R . |
|||||||
|
|
|
|
||||||||||||||
|
=10 равенство (2) дает результат – A(F ) = 1,8P |
|
|
||||||||||||||
При |
− |
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Подставляя найденные значения работ в уравнение (1), и учитывая, что v0 = 0 , а m = Pg , определим из него искомую скорость vD : vD = 
 65,8 = 8,1 м/с.
65,8 = 8,1 м/с.
Для определения искомой силы давления рассмотрим шар в точке D и приложим
к нему силу тяжести |
|
|
и реакцию |
|
|
|
. Основное уравнение динамики ma = |
|
+ |
|
|
|||||
P |
||||||||||||||||
|
N |
P |
N |
|||||||||||||
спроектируем на нормальную ось, проведенную из точки D к центру О. |
||||||||||||||||
|
|
|
man = ND - P cos β , an = |
vD2 |
|
|||||||||||
|
|
|
R |
|||||||||||||
|
|
|
|
|
vD2 |
|
||||||||||
|
|
|
|
m |
= ND - P cos β |
|||||||||||
|
|
|
|
|
||||||||||||
Откуда |
|
|
|
|
R |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
N D = |
mvD2 |
+ P cos β , ND = 12P Н |
|||||||||||
|
|
|
|
|||||||||||||
|
|
|
|
R |
||||||||||||
Сила давления |
шара на стержень численно равна ND , но направлена в |
|||||||||||||||
противоположную сторону. Ответ: vD = 8,1 м/с, ND = 12P Н.
36
Задача Д 4 |
1 |
|
2 |
|
|
|
|
Механическая система состоит из грузов |
и |
(коэффициент трения грузов о |
|||||
плоскость = 0,1), цилиндрического сплошного |
|
|
|
ступенчатых |
|||
|
|
однородного катка 3 и |
|
||||
шкивов 4 и 5 с радиусами ступеней |
= 0,3 м, |
= 0,1 м, |
= 0,2 м, = 0,1 м (массу |
||||
каждого шкива считать равномерно |
распределенной |
по его внешнему ободу) |
|||||
(рисунки Д4.0 – Д4.9, таблица Д4). Тела системы соединены друг с другом нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям.
Под действием силы = (s), зависящей от перемещения точки приложения силы, система приходит в движение из состояния покоя. При движении системы на шкивы 4 и 5 действуют постоянные моменты сил сопротивлений, равные
соответственно |
и |
. |
Определить значение искомой величины в тот момент |
|||||
времени, когда перемещение точки приложения силы |
|
равно . Искомая величина |
||||||
|
||||||||
указана в столбце “ Найти “ таблицы, где обозначено: |
- скорость груза 1, |
- |
||||||
скорость центра масс катка |
|
, |
- угловая скорость тела 4 и т. д. |
|
||||
Указания. |
Задача Д |
4 - на применение теоремы об изменении кинетической |
||||||
3 |
|
|
|
|
|
|||
энергии системы. При решении задачи учесть, что кинетическая энергия системы равна сумме кинетических энергий всех тел, входящих в систему: эту энергию нужно выразить через ту скорость (линейную или угловую3 ), которую нужно определить. При вычислении кинетической энергии катка , который совершает плоское движение, для установления зависимости между его угловой скоростью и скоростью
центра масс катка нужно воспользоваться понятием о мгновенном центре скоростей (кинематика). При определении работы сил все перемещения следует выразить через заданное перемещение , учтя, что зависимость между перемещениями будет такой
же, как между соответствующими скоростями. Когда по данным таблицы |
= 0, груз |
||||||||||||
2 на чертеже не изображать; шкивы 4 и 5 всегда входят в систему. |
|
|
|
||||||||||
Таблица Д4 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Номер |
, |
|
, |
, |
, |
, |
|
, |
, |
F = (s), |
, |
|
Найти |
услов. |
кг |
|
кг |
кг |
кг |
кг |
Н м |
Н м |
Н |
м |
|
||
|
|
|
|||||||||||
0 |
2 |
|
0 |
4 |
6 |
0 |
0∙ |
|
0,8∙ |
50 (2 + 3s) |
1,0 |
|
|
1 |
6 |
|
0 |
2 |
0 |
8 |
0,6 |
0 |
20 (5 + 2s) |
1,2 |
|
|
|
2 |
0 |
|
4 |
6 |
8 |
0 |
0 |
|
0,4 |
80 (3 + 4s) |
0,8 |
|
|
3 |
0 |
|
2 |
4 |
0 |
10 |
0,3 |
0 |
40 (4 + 5s) |
0,6 |
|
|
|
4 |
8 |
|
0 |
2 |
6 |
0 |
0 |
|
0,6 |
30 (3 + 2s) |
1,4 |
|
|
5 |
8 |
|
0 |
4 |
0 |
6 |
0,9 |
0 |
40 (3 + 5s) |
1,6 |
|
|
|
6 |
0 |
|
6 |
2 |
8 |
0 |
0 |
|
0,8 |
60 (2 + 5s) |
1,0 |
|
|
7 |
0 |
|
4 |
6 |
0 |
10 |
0,6 |
0 |
30 (8 + 3s) |
0,8 |
|
|
|
8 |
6 |
|
0 |
4 |
0 |
8 |
0,3 |
0 |
40 (2 + 5s) |
1,6 |
|
|
|
9 |
0 |
|
4 |
6 |
10 |
0 |
0 |
|
0,4 |
50 (3 + 2s) |
1,4 |
|
|
37
5 |
2 |
4 |
|
|
4 |
3 |
5 |
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|||
1 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
F |
|
|
|
|
2 |
|
|
|
||
|
|
|
|
|
|
30 |
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
45 |
|
6 0 |
|
|
60 |
|
|
|
|
Рис. Д4.0 |
|
|
|
|
Рис. Д4.1 |
|
|
|
|
|
4 |
|
|
4 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
3 |
|
|
|
|
|
|
|
|
|
||
5 |
|
|
1 |
|
|
|
|
|
30 |
|
F |
|
30 |
|
5 |
||
|
|
|
4 5 |
|
||||
|
|
60 |
F |
|
2 |
|||
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
45 |
Рис. Д4.2 |
|
|
|
|
Рис. Д4.3 |
|
60 |
|
|
|
|
|
|
|
2 |
5 |
|
4 |
2 |
5 |
4 |
Рис. |
|
|
||
3 |
1 |
|
|
|
|
Д4.5 |
|
|
1 |
||
|
|
|
30 |
45 |
F |
3 |
F |
|
45 |
|||
|
|
|
60 |
|
Рис. Д4.4 |
|
|
Рис. Д4.5 |
|
4 |
|
|
4 |
|
2 |
|
|
2 |
1 |
|
|
|
||
1 |
5 |
|
5 |
F |
|
30 |
|||
30 |
|
|
||
3 |
3 |
45 |
||
F |
|
|
|
|
60 |
45 |
|
60 |
|
Рис. Д4.6 |
|
|
Рис.Д4.7 |
|
5 |
2 |
4 |
1 |
|
5 |
3 |
4 |
3 |
|
|
|
F |
1 |
|
|
|
|
|
3 0 |
|
F |
|
2 |
45 |
|
|
|
30 |
|
|
|
Рис.Д4.8 |
|
|
|
Рис.Д4.9 |
|
||
|
|
|
|
60 |
|||
|
|
|
|
|
|
|
38
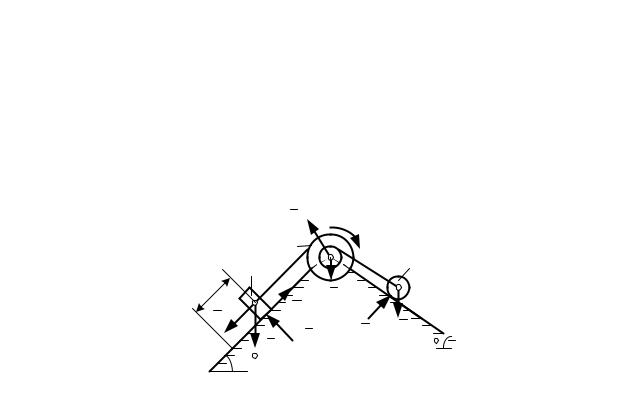
Пример Д4. Механическая система (рис. Д 4) состоит из груза 1, (коэффициент |
|||||||||||
трения груза о плоскость равен ), ступенчатого шкива 2 с радиусами ступеней |
и |
||||||||||
(масса шкива равномерно распределена по его внешнему ободу) и сплошного |
|||||||||||
цилиндрического катка 3. Тела системы соединены друг с другом нитями, |
|||||||||||
намотанными на шкив 2. Под действием силы |
= |
|
, зависящей от перемещения |
|
|||||||
точки ее приложения, система приходит в |
движение из состояния покоя. При |
||||||||||
|
( ) |
|
|
|
|
||||||
движении на шкив 2 действует постоянный момент |
сил сопротивления. |
|
|
||||||||
Дано: |
= 6 кг, |
= 8 кг, |
= 4 кг, |
= 0,2 м, |
= 0,1 м, |
= 0,2, |
= 0,6 H·м, |
||||
= 4 (2 + 3 ) H, = 2 м. |
|
|
|
|
|
|
|
|
|
||
Определить: скорость груза 1, когда |
= . |
|
|
|
|
|
|
|
|||
|
|
|
|
N2 |
|
М2 |
|
|
|
|
|
|
|
|
|
2 |
|
3 |
|
|
|
||
|
|
s1 |
1 |
|
|
|
|
|
|
||
|
|
|
Р2 |
|
|
|
|
|
|
||
|
|
F |
|
F1тр |
|
Р3 |
|
|
|
|
|
|
|
|
N1 |
|
N3 |
|
|
|
|
||
|
|
|
45 Р1 |
|
30 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Д4 |
|
|
|
|
|
|
|
Решение. 1. Рассмотрим движение неизменяемой механической системы, состоящей из тел 1, 2, 3, соединённых нитями. Изобразим все действующие на систему внешние
силы: активные |
|
, |
|
, |
|
, |
|
, момент сопротивления |
, реакции связей |
|
, |
|
, |
|
и |
||||||
силу трения |
|
тр. |
Для определения скорости груза |
воспользуемся теоремой об |
|||||||||||||||||
|
|||||||||||||||||||||
изменении кинетической энергии системы: |
|
|
|
|
|
|
|
||||||||||||||
2. |
|
|
|
|
|
|
|
|
|
|
|
T |
|
= ∑ |
|
|
|
|
|
|
(1) |
Определим |
|
|
и |
. |
Так как в |
начальный момент система находилась в покое, |
то |
||||||||||||||
|
|
|
|
− |
|
|
|
|
|
|
|
|
|||||||||
|
= 0. Величина кинетической энергии системы равна сумме кинетических энергий |
||||||||||||||||||||
всех тел системы: |
|
|
|
|
|
|
|
|
= |
+ + . |
|
|
|
|
|
|
(2) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Учитывая, что тело 1 движется поступательно, шкив 2 вращается вокруг неподвижной оси, а каток 3 – плоскопараллельно, получим
= |
|
|
|
|
, = |
|
, |
= |
|
|
+ |
|
|
. |
(3) |
|||||||||
|
|
|
|
|
|
|
||||||||||||||||||
Все входящие сюда скорости выразим через искомую . |
|
|
|
|
|
|
||||||||||||||||||
= |
|
, |
= |
= |
|
|
, = |
|
|
= |
|
|
|
|
. |
(4) |
||||||||
|
|
|
|
|
|
|
||||||||||||||||||
Входящие в (3) моменты инерции шкива (2) и катка (3) имеют значения: |
|
|||||||||||||||||||||||
|
|
|
|
|
I2 = |
, |
|
= |
|
|
|
|
. |
|
|
|
|
|
|
|
(5) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Подставив все величины (4) и (5) в равенство (3), а затем используя равенство (2), получим окончательно:
39
= ( |
|
+ |
|
+ |
|
|
|
) . |
(6) |
|
|
|
|
3. Теперь найдём сумму работ всех действующих внешних сил при том перемещении, которое будет иметь система, когда тело 1 пройдёт путь . Все перемещения выразим через заданное перемещение груза 1. Зависимость между перемещениями будет такой же, как и между соответствующими скоростями в равенствах (4), т.е.
= / , = ( |
|
/ |
|
∫ |
|
|
sin |
|
∫ |
|
4 |
(2 + 3 ) |
|
|
|
|
|
|
|
|
||||||
|
|
|
). В результате получим: |
|
|
|
|
|||||||||||||||||||
|
|
|
|
тр |
|
|
|
|
тр |
|
|
° |
|
|
|
|
|
− |
|
|
|
|
− |
|
|
|
( |
|
|
) = |
|
|
|
= |
|
|
|
|
|
|
|
|
|
= 2 (4 + 3 ), |
|||||||||
|
|
|
|
|
|
|
|
− |
|
|
sin |
− |
|
|
|
|
|
− |
|
|
|
|
° |
|
|
|
( |
|
|
) = |
|
|
|
45 |
|
, |
|
( |
|
) = |
|
|
= |
|
|
|
, |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
° |
|
− |
|
|
|
|
|
° |
|
|
|
|
( |
|
|
|
|
) = |
|
|
|
= |
|
|
|
|
|
= |
|
|
|
sin 45 |
|
, |
|
||||
( |
|
|
|
) = |
|
|
|
|
|
|
30 |
|
= |
|
|
|
|
|
sin 30 . |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
4. Работа остальных сил равна нулю, так как точка О, где приложены |
|
и |
|
, |
|||||||||||||||||||||||||||||
неподвижна, |
|
а реакции |
|
|
|
и |
|
|
|
|
перпендикулярны |
|
к |
перемещениям |
точек |
их |
|||||||||||||||||
приложения. Тогда окончательно сумма работ всех внешних сил будет равна: |
|
|
|||||||||||||||||||||||||||||||
∑ = 2 (4 |
|
+ 3 ) + |
|
|
sin 45° |
− |
sin 45° |
− |
|
|
|
|
− |
|
|
|
sin 30°. |
(7) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
5. Подставив (6) и (7) в уравнение (1) и учитывая, что |
= 0, получим |
° − |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
− |
|
|
|
|
° |
|
|
− |
|
|
− |
|
|
|
|
|
° |
|
|
|
|
|
|||||||
|
( |
|
+ |
|
|
|
+ |
|
|
|
|
|
|
) |
= 2 (4 |
+ 3 |
|
) + |
|
|
sin 45 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
sin 45 |
|
|
|
|
|
|
|
|
|
|
|
sin 30 . |
|
|
(8) |
|||||||||||
Подставляя числовые значения и решая равенство (8), определим искомую скорость груза 1.
Ответ: = 14,85 м/с.
Задача Д5
Вертикальный вал АК (рис. Д5.0-Д5.9, табл. Д5), вращающийся с постоянной угловой скоростью ω = 10 рад / с , закреплен подпятником в точке А и
цилиндрическим подшипником в точке, указанной в табл. Д4 в столбце 2 (АВ = ВD = |
||
=DЕ = ЕК = b). К валу жестко прикреплены невесомый стержень 1 длиной l1 = 0,4 м с |
||
точечной массой |
1 = 6 кг на конце и однородный стержень 2 длиной l2 = 0,6 м, |
|
имеющий массу т2 = 4 кг; оба стержня лежат в одной плоскости. Точки крепления |
||
стержней к валу указаны в таблице в столбцах 3 и 4, а углы α и β |
– в столбцах 5 и 6. |
|
Пренебрегая весом |
вала, определить реакции подпятника и |
подшипника. При |
окончательных подсчетах принять |
= 0,4 м. |
|
|
|
||
Указания. Задача Д5 – на применение к изучению движения системы принципа |
||||||
Даламбера. При решении задачи |
учесть, что когда силы |
инерции |
частиц тела |
|||
(в данной задаче стержня 2) имеют равнодействующую |
|
И , |
то численно R И = maC , |
|||
R |
||||||
где aC – ускорение центра масс С стержня, но линия действия силы |
|
И в общем |
||||
R |
||||||
случае не проходит через точку С (см. пример Д5). |
|
|
|
|||
|
40 |
|
|
|
|
|