

Область векторов прерываний
Область векторов прерываний занимает адреса с 0000H по 0050H. По адресу 0000H, загружаемому в счетчик команд МП после сброса RESET, лежит команда перехода JMP к началу основной программы. В адресах 0024Н, 003СН расположены команды перехода JMP к п/п обработки прерываний TRAP, (интервал 20 мс) и RST 7.5 (интервал 1 с).
Переходы к подпрограммам BIOS
Область переходов к подпрограммам BIOS содержит 18 команд JMP addr. Это упрощает обращение к BIOS из любого места программы и делает BIOS более автономным.
Константы
Область констант содержит таблицу поправок для расчета угла , а также некоторые константы, которые могут быть изменены при отладке контроллера.
Микросхема ОЗУ
При работе программ задействовано ОЗУ на микросхеме К537РУ10 объемом 2 Кбайта. Микросхема ОЗУ занимает адреса 7800H...7FFFH и используется как память данных. Содержимое ОЗУ представлено в таблице 1.10.2.2.
Глава 2 Технологическая часть
Разработал Смирнов С.А.
Руководитель Савченко Ю.В.
2.1. Технология разработки электронных плат контроллера
При разработке электронных плат контроллера-компенсатора реактивной мощности была использована система автоматизированного проектирования радиоэлектронной аппаратуры P-CAD.
2.2. Технология разработки программного обеспечения
Программы контроллера были написаны и отлаживались на IBM – совместимом компьютере. Для набора программ на языке Ассемблер i8085 использовался обычный редактор текста для MS DOS. В качестве кросс – средств использовались программы x8085.exe, link.exe и zsid.exe фирмы Microsoft, известные ещё по операционной системе CP/M. Выбор настоящих кросс-программ обусловлен их многолетней безукоризненной эксплуатацией. В отличие от ряда современных кросс-средств, имеющих «дружеский» графический интерфейс, они не имеют ограничений в обозначениях адресов, данных и меток.
Запись программы в микросхему ПЗУ производилась с помощью программатора КРОТ с соответствующим программным обеспечением.
X8085.Exe
Транслятор исходного текста программы в объектный код. Если исходный файл носил имя work.i85, то в результате трансляции получаем файл work.obj. По окончанию работы транслятор выводит сообщение об имеющихся в программе ошибках.
link.exe
Компоновщик программы. В результате компоновки файла work.obj получаем загрузочный код программы work.tsk, привязанный к конкретным физическим адресам контроллера. В ходе компоновки имеется возможность подключить к своей программе библиотеку lib.obj с подпрограммами. Так подпрограммы BIOS можно свести в такую библиотеку, но настоящая работа не доведена до конца.
zsid.exe
Символический отладчик программ для микропроцессоров i8080, i8085, z80.
Отладчик позволяет:
выводить в шестнадцатиричном формате содержимое 192 ячеек памяти;
реассемблировать содержимое памяти;
выполнять программу начиная с заданного адреса;
выводить содержимое регистров и т.д.
Настоящий отладчик в процессе разработки использовался для проверки вызова многочисленных подпрограмм программного обеспечения, а также на начальном этапе проектирования для отладки подпрограмм BIOS.
Ниже представлен рисунок, поясняющий процесс подготовки и отладки программ.
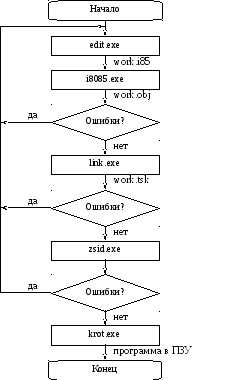
Рисунок 2.2.1. Алгоритм подготовки и отладки программ.
С целью упрощения работы с настоящими программами использовался командный файл work.bat, запускаемый после редактирования исходного текста программы work.i85:
X8085 work.i85
Link work
Del work.obj
Krot
Del work.tsk
При этом в том же каталоге должен находиться текстовый файл связки work.lnk, содержащий следующие строки:
Work
[пусто]
[пусто]
work
[пусто]
[пусто]
x