

Моментом силы относительно точки называется |
|
величина, равная векторному произведению |
|
радиус-вектора, проведенного из этой точки в |
|
точку приложения силы, на вектор силы. |
|
M |
|
F |
|
r |
M r F |
|
|
0 |
|

Рисунок показывает взаимное расположение векторов, если смотреть вдоль вектора момента силы.
F |
O |

Здесь и на последующих рисунках значком обозначено направление вектора, направленного
«от нас».
Модуль момента силы равен произведению величины силы на её плечо.
Плечо силы равно длине перпендикуляра, опущенного из точки вращения на линию действия силы.
M r Fsin α Fl
l – плечо силы F

На рисунке показаны плечи d1 и d2 сил F1 и F2 соответственно.
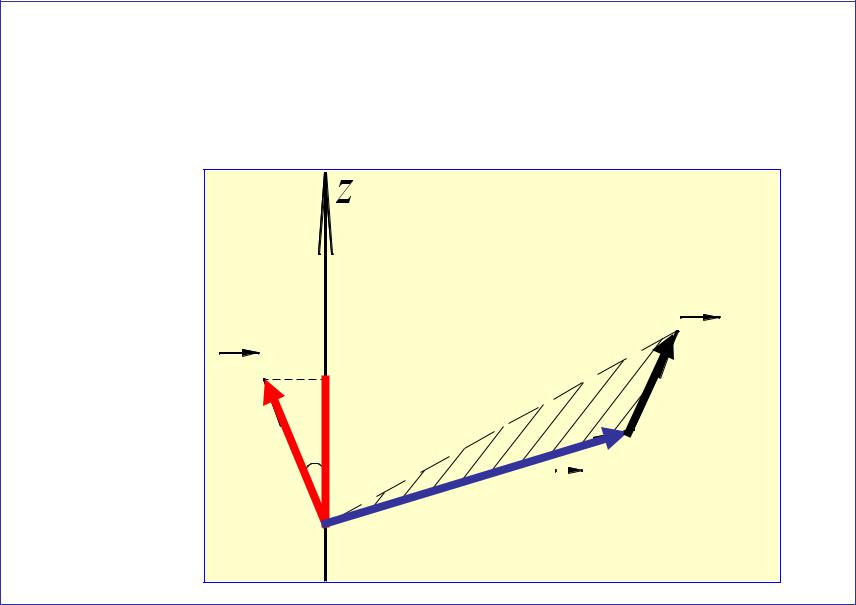
Моментом силы относительно некоторой оси Z называется проекция момента силы относительно любой точки, взятой на данной оси, на эту ось Z.
M |
Mz |
F |
|
r |
|||
|
|

MZ (r F)Z
Момент силы относительно оси – величина скалярная, не имеющая направления.
Модуль момента силы относительно оси может быть положительным или отрицательным в зависимости от величины угла α.

Рассмотрим случай, когда ось вращения закреплена.
Силу F следует представить в виде суммы трёх векторов:
F║ - направленного вдоль оси вращения,
F┴ - перпендикулярного оси вращения,
Fτ - направленного по касательной к окружности, вдоль которой движется точка приложения силы.
F F F F

|
F |
F |
|
|
|
0' |
R |
F |
|
F |
|
M |
r |
|

F F F F
Умножим равенство слева и справа векторно на радиус- вектор.
Получим равносильное равенство:
M M M M
Не равен нулю только момент составляющей силы F .
Тогда |
|
|
M r F M |

Модуль момента силы относительно закреплённой оси |
|||
Z будет равен |
|
|
|
Mz Mτ z Mτ cosα r Fτ cosα R Fτ |
|||
Здесь Fτ – проекция составляющей силы |
Fτ |
на |
|
направление перемещения точки приложения силы. |
|||
|
F |
|
|
|
F |
|
|
0' |
R |
|
|
|
F F |
|
|
M |
r |
|
|