

8.2. Физический маятник
В озьмем
произвольное тело, пронзим его в какой
либо точке несовпадающей с его центром
масс осью вокруг которой тело может
свободно поворачиваться. Подвесим тело
на этой оси, и отклоним его из положения
равновесия на некоторый угол
.
озьмем
произвольное тело, пронзим его в какой
либо точке несовпадающей с его центром
масс осью вокруг которой тело может
свободно поворачиваться. Подвесим тело
на этой оси, и отклоним его из положения
равновесия на некоторый угол
.
Т огда
на тело с моментом инерции I
относительно оси О
будет действовать возвращающий в
положение равновесия момент М
= -mglsin
и
колебания физического маятника как и
математического будут описываться
дифференциальным уравнением:
огда
на тело с моментом инерции I
относительно оси О
будет действовать возвращающий в
положение равновесия момент М
= -mglsin
и
колебания физического маятника как и
математического будут описываться
дифференциальным уравнением:
Так как для разных физических маятников момент инерции будет выражаться по разному, то его не будем расписывать как в случае с математическим маятником. Это уравнение так же имеет вид уравнения колебаний, решением которого являются функции описывающие гармонических колебаний. При этом циклическая частота (), период колебаний (Т) определяются как:

Мы видим, что в случае физического маятника период колебаний зависит от геометрии тела маятника, а не от его массы , как и в случае математического маятника. Действительно в выражение для момента инерции входит масса маятника в первой степени. Момент инерции в выражении для периода колебаний стоит в числителе, в то время как масса маятника входит в знаменатель и тоже в первой степени. Таким образом, масса в числителе сокращается с массой в знаменателе.
Физический маятник обладает еще одной характеристикой это приведенная длина.
Приведенной длиной физического маятника называется длина математического маятника период, которого совпадает с периодом физического маятника.
Это определение позволяет легко определить выражение для приведенной длины.
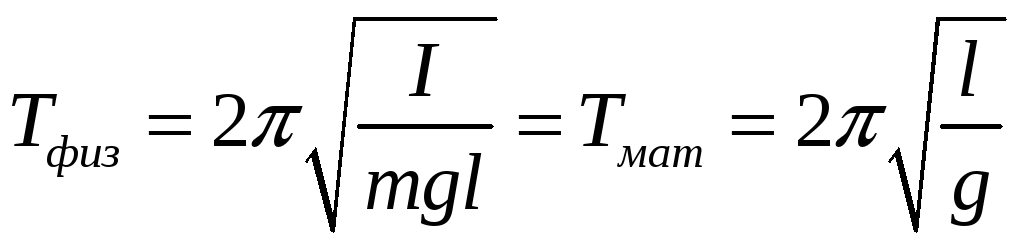
Сравнивая эти выражения получим


Если на линии проведенной от точки подвеса через центр масс физического маятника отложить (начиная от точки подвеса) приведенную длину физического маятника, то в конце этого отрезка будет точка, которая обладает замечательным свойством. Если физический маятник подвесить за эту точку, то его период колебаний будет тот же, что и в случае подвешивания маятника в прежней точке подвеса. Эти точки называются центрами качания физического маятника.
Рассмотрим еще одну простейшую колебательную систему совершающую гармонические колебания
8.3. Пружинный маятник
П редставим,
что к концу пружины с коэффициентом
жесткости k
прикреплен груз массой m.
редставим,
что к концу пружины с коэффициентом
жесткости k
прикреплен груз массой m.
Если мы переместим груз вдоль оси х растянув пружину то на груз будет действовать возвращающая в положение равновесия сила Fвозвр= - kx . Если груз отпустить, то эта сила вызовет ускорение d2x /dt2. Согласно второму закону Ньютона мы получим:
md2x /dt2 = - kx из этого уравнения получаем уравнение колебания груза на пружине в окончательном виде: d2x /dt 2+ (k/m)x = 0
Э то
уравнение колебаний имеет такой же вид
как и уравнения колебаний в уже
рассматриваемых случаях, а это значит,
что решением этого уравнения будут
такие же гармонические функции. Частота
и период колебаний будут соответственно
равны
то
уравнение колебаний имеет такой же вид
как и уравнения колебаний в уже
рассматриваемых случаях, а это значит,
что решением этого уравнения будут
такие же гармонические функции. Частота
и период колебаний будут соответственно
равны
Причем сила тяжести ни коем образом не влияет на колебания пружинного маятника. Так как в этом случае она является постоянно действующим фактором , действующим все время в одну сторону и не имеющая ничего общего с возвращающей силой.
Таким образом как мы видим колебательный процесс в механической колебательной системе характеризуется прежде всего наличие в системе возвращающей силы действующей на систему, а сами колебания характеризуются: амплитудой колебания их периодом, частотой и фазой колебаний.