

Desktop_1 / Лекции 1 симестр / механика5
.docЛекция №5
Механика
Динамика твердого тела
(Динамика вращательного движения. Основные динамические характеристики вращательного движения. Основной закон вращательного движения. Теорема Штейнера. Момент импульса. Закон сохранения момента импульса)
До сих пор мы рассматривали динамику материальной точки, теперь перейдем к рассмотрению динамики абсолютно твердого тела.
Абсолютно твердым телом называется такое тело, деформацией которого в данной задаче можно пренебречь. При своем движении абсолютно твердое тело ведет себя как единое целое.
Любое движение твердого тела может быть сведено к сумме вращательного и поступательного движения. Вращение тела можно рассматривать как последовательное вращение вокруг мгновенных осей, положение которых может изменяться со временем.
Механика поступательного движения у абсолютно твердого тела такая же как и у материальной точки. Все точки тела при поступательном движении движутся подобным образом (подобные траектории, одни и те же скорость и ускорение) поэтому для описания движения тела достаточно рассчитать как движется одна из точек тела, например центр масс тела, движение которого будет полностью описывать поступательное движение всего тела. Поэтому от формы тела при расчете поступательного движения можно абстрагироваться и рассчитывают как движется материальная точка с координатами центра масс тела и его массой.
При вращательном движении тела каждая его точка движется по окружности центр которой лежит на одной общей оси вращения. Вращение точек происходит в своих плоскостях параллельных друг другу (поэтому такое движение называют плоским). Вращательное движение характеризуется, как вы уже знаете тремя величинами являющимися псевдовекторами, это - угол поворота, - угловая скорость, β – угловое ускорение.
Вращательное действие силы (сообщение телу углового ускорения) зависит не только от величины силы, но и от направления и от расположения точки тела к какой приложена сила. Действительно если приложить силу к закрепленной оси вращения тела или к центру инерции свободного тела вращения мы получить не сможем. Единственное, что мы получим если тело не закреплено, то оно начнет поступательно перемещаться под действием приложенной силы. Величина, которая учитывает все эти факторы, и может вызвать вращение тела, называется моментом силы. Дадим определение этой величине.
Пусть на твердое тело имеющее закрепленную ось вращения в некой точке в произвольном направлении действует сила F
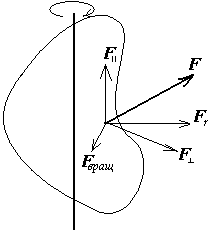
Рис.5.1
Разложим эту силу на две составляющие Fнормаль и Fпаралл Так как ось жестко закреплена, она навязывает плоскость вращения, и Fпаралл вызвать движение не может.
Рассмотрим наше тело сверху
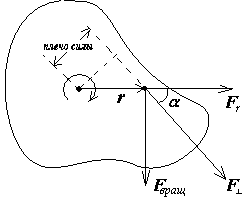
Рис.5.2
Р![]() ассмотрим
силу Fнормаль
в плоскости вращения. Соединим радиус
вектором r
ось вращения с центром приложения сил.
Проекция силы
Fнормаль
на радиус вектор Fr
ащения вызвать так же не может. Вращение
может лиш вызвать составляющая силы
Fвращ.
Моментом сил называется векторная
величина:
ассмотрим
силу Fнормаль
в плоскости вращения. Соединим радиус
вектором r
ось вращения с центром приложения сил.
Проекция силы
Fнормаль
на радиус вектор Fr
ащения вызвать так же не может. Вращение
может лиш вызвать составляющая силы
Fвращ.
Моментом сил называется векторная
величина:
М![]() омент
сил по абсолютной величине равен:
омент
сил по абсолютной величине равен:
Можно дать другое определение момента сил
Моментом сил является вектор направление которого совпадает с осью вращения (он направлен в сторону вкручивания правого винта если винт вращается в направлении действия силы. По абсолютной величине момент сил равен произведению составляющей силы лежащей в плоскости перпендикулярной оси вращения умноженной на плечо силы. Плечом силы будем называть кратчайшее расстояние от оси вращения до линии действия силы.
Найдем связь между моментом сил действующим на вращающееся тело и его угловым ускорением.
Выделим во вращающемся теле малый элемент массы dmi . Радиус окружности по которой вращаеися этот элемент обозначим через ri .
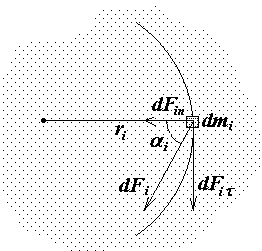
Рис.5.3
Пусть сила действующая на этот элемент лежащая в плоскости вращения тела равна dFi. Разложим эту силу на две составляющие на dFin направленную по радиусу вращения, и на dFiτ, вызывающую вращение тела. Первая сила обуславливает нормальное ускорение. Вторая сила обуславливает тангенциальное ускорение частицы.
Согласно второму закону Ньютона dFiτ = dmiaiτ , dFiτ = dFisin
Тангенциальное и угловое ускорения связаны выражением aiτ = βri отсюда
dmi βri = dFisin . Умножив обе части равенства на ri получим β ri2 dmi = dFi ri sin. Это равенство можно переписать в виде: β ri2 dmi = dMi. Для определения момента действующего на все тело необходимо суммировать все моменты dMi для элементов тела dmi . Другими словами проинтегрируем это равенство по всем элементам тела и получим.
![]()
![]() Обозначим
Обозначим
Тогда основной закона вращательного движения можно представить в следующем виде
![]()
Момент инерции характеризует полный вращательный момент тела, его геометрические и инертные свойства, проявляющиеся при вращательном движении. Каждое физическое тело обладает своим моментом инерции.
В общем случае, когда ось вращения тела не совпадает с осью симметрии и не проходит через центр масс, ось испытывает со стороны вращающегося тела боковые не скомпенсированные усилия. Если ось вращения проходит через центр инерции тела и является осью симметрии этого тела, то все силы компенсируются и боковых усилий на ось не возникает. В этом случае, даже если освободить ось от удержания она останется неподвижной.
Ось вращения, которая при вращении тела остается неподвижной при отсутствии ее закрепления, называется свободной осью вращения тела.
У любых физических тел существует не меньше трех взаимно ортогональных осей проходящих через центр инерции тела, которые являются свободными осями вращения тела.
Момент инерции тела можно рассчитать. У простых тел момент инерции тела относительно свободных осей вращения рассчитать момент инерции очень не трудно.
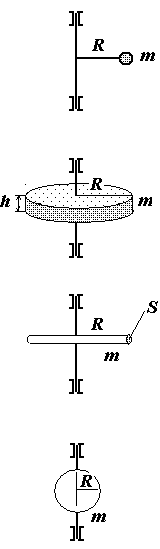


Рис.5.4
В более общем случае, когда ось вращения не проходит через центр инерции тела, вычислить момент инерции тела в простых случаях помогает теорема Штейнера.
Момент инерции относительно произвольной оси равен сумме момента инерции Ic относительно оси проходящей через центр масс и параллельной данной оси и произведению массы тела на квадрат расстояния между осями. I= Ic+ ma2

Рис.5.5
Выберем в теле произвольную малую частицу с массой mi . Центр масс тела точку С соединим радиус вектором Ri с этой частицей. Радиус вектор Ri/ является суммой двух векторов Ri и a. Ri/ = Ri + а . Ri/2= Ri2+2а Ri+ а2 отсюда можно написать следующие равенства I=Σmi Ri/2 = а2 Σm i+2 а Σmi Ri + Σmi Ri 2 . Так как Σmi Ri = MR , где R радиус вектор, проведенный от оси, относительно которой вычисляется момент инерции, до центра масс, а он равен нулю, потому что ось проходит через центр масс, то и вся сумма будет равна нулю Отсюда окончательно получаем.
I= а2 Σmi + Σmi Ri 2 = Ма2+Ic
Э![]() то
и есть математическая форма записи
теоремы Штейнера.
то
и есть математическая форма записи
теоремы Штейнера.
Вернемся к основному уравнению для вращательного движения
Это уравнение можно представить в виде:
![]()
В этом выражении произведение I = L является моментом импульса и является вектором, который направлен в сторону направления угловой скорости вращения тела. Импульс момента сил, действующий на систему равен изменению момента импульса этой системы
Из этого выражения вытекает один из фундаментальных законов механики.
Закон сохранения момента импульса
Е![]() сли
на замкнутую систему не действуют
внешние силы, то ее момент импульса
остается неизменным. Действительно
из основного закона вращательного
движения
сли
на замкнутую систему не действуют
внешние силы, то ее момент импульса
остается неизменным. Действительно
из основного закона вращательного
движения
Следует, что если момент сил не действует на систему (М=0), то производная по времени от момента импульса системы так же будет равна нулю, а это значит, что момент импульса системы при этом будет оставаться постоянным во времени (I = L=const )
Имеются аналогии между вращательным и поступательным движениями. Обозначим их.
|
Поступательное движение |
Вращательное движение |
|
Линейный путь S |
Угловой путь |
|
Линейная скорость V |
Угловая скорость |
|
Линейное ускорение а |
Угловое ускорение β () |
|
Масса m |
Момент инерции I |
|
Cила F |
Момент сил М |
|
Импульс mV |
Момент импульса I |
|
Импульс силы Fdt |
Импульс момента сил Мdt |
|
Второй закон Ньютона F= m а |
Основной закон вращательного движения М= I β |