

Desktop_1 / Лекции 1 симестр / механика2
.docЛекция №2
Механика
Кинематика поступательного и вращательного движения
(Материальная точка, система отсчета, перемещение, скорость, ускорение, основная задача кинематики)
Кинематика - это раздел механики, где изучаются способы описания движений независимо от причин, обусловливающих эти движения, то есть, в основном, геометрические свойства движения. Массы тел и действующие на них силы в кинематике не рассматриваются. В лекциях по кинематике рассмотрены три вопроса, необходимых для понимания физических основ механики: кинематика частицы, кинематика твердого тела и преобразование скорости и ускорения при переходе от одной системы отсчета к другой
Если размеры тела при описании его движения несущественны, то его движение можно рассматривать как движение материальной точки в пространстве. Это самая простая модель для описания реального тела. Так как в дальнейшем будут рассматриваться движения тела обладающего массой, но в пренебрежении ее размерами, внутренней структуры и формы, то введем в рассмотрение единый термин частица, понимая под ним материальную точку. Существует несколько способов описания движения частицы: векторный (геометрический) и координатный. Рассмотрим их последовательно.
Векторный
способ.
В этом способе положение интересующей
нас частицы А задают радиусом-вектором
![]() ,
проведенным из некоторой неподвижной
точки О выбранной системы
отсчета
в
точку А. Под системой отсчета в механике
понимают совокупность: тело отсчета,
способ измерения расстояний ("линейка")
и способ измерения времени ("часы").
При движении частицы А ее радиус-вектор
меняется в общем случае как по модулю,
так и по направлению, т. е. радиус-вектор
,
проведенным из некоторой неподвижной
точки О выбранной системы
отсчета
в
точку А. Под системой отсчета в механике
понимают совокупность: тело отсчета,
способ измерения расстояний ("линейка")
и способ измерения времени ("часы").
При движении частицы А ее радиус-вектор
меняется в общем случае как по модулю,
так и по направлению, т. е. радиус-вектор
![]() зависит
от времени t.
зависит
от времени t.
|
|
|
Рис. 2.1. Векторный способ описания движения частицы |

Геометрическое
место точек, где тело побывало за время
своего движения, называется траекторией
частицы
А.
При векторном способе описания траекторией
будет положение концов радиус-вектора
![]() во
все моменты времени.
во
все моменты времени.
Введем
понятие скорости
частицы. Скорость характеризует быстроту
движения частицы. Пусть за промежуток
времени
![]() точка
А переместилась из точки 1 в точку 2 (рис.
2.1). Из рисунка видно, что вектор
перемещения
точка
А переместилась из точки 1 в точку 2 (рис.
2.1). Из рисунка видно, что вектор
перемещения
![]() частицы
А представляет собой приращение
радиус-вектора
частицы
А представляет собой приращение
радиус-вектора
![]() за
время (t :
за
время (t :
![]() .
Отношение
.
Отношение
![]() называют
средним
вектором скорости
<
называют
средним
вектором скорости
<![]() >
за время (t. Вектор <
>
за время (t. Вектор <![]() >
совпадает по направлению с
>
совпадает по направлению с
![]() .
Определим теперь вектор скорости
.
Определим теперь вектор скорости
![]() частицы
в данный момент времени как предел
отношения
частицы
в данный момент времени как предел
отношения
![]() при
t→ 0, т. е.
при
t→ 0, т. е.
|
|
(2.1) |
Это
значит, что вектор скорости
![]() частицы
в данный момент времени равен производной
от радиус-вектора
частицы
в данный момент времени равен производной
от радиус-вектора
![]() по
времени и направлен по касательной к
траектории в данной точке в сторону
движения частицы А (как и вектор
по
времени и направлен по касательной к
траектории в данной точке в сторону
движения частицы А (как и вектор
![]() ).
Модуль вектора
).
Модуль вектора
![]() равен
равен
![]()
Заметим,
что в общем случае модуль приращения
радиус-вектора
![]() не
равен изменению модуля радиус-вектора
не
равен изменению модуля радиус-вектора
![]() .
Например, если
.
Например, если
![]() меняется
только по направлению при движении
частицы по окружности, то
меняется
только по направлению при движении
частицы по окружности, то
![]() но
но
![]() .
.
Движение
частицы характеризуется также ускорением.
Вектор ускорения
![]() определяет
скорость изменения вектора скорости
определяет
скорость изменения вектора скорости
![]() со
временем:
со
временем:
|
|
(2.2) |
т.
е. равен производной от вектора скорости
по времени. Направление вектора
![]() совпадает
с направлением вектора
совпадает
с направлением вектора
![]() -
приращением вектора
-
приращением вектора
![]() за
время dt. Модуль вектора
за
время dt. Модуль вектора
![]() определяется
аналогично модулю вектора
определяется
аналогично модулю вектора
![]() .
Пусть, например, радиус-вектор частицы
зависит от времени t по закону
.
Пусть, например, радиус-вектор частицы
зависит от времени t по закону
![]() ,
,
где
![]() и
и
![]() -
постоянные векторы. Найдем скорость
-
постоянные векторы. Найдем скорость
![]() и
ускорение
и
ускорение
![]() частицы:
частицы:
![]() Модуль
вектора скорости
Модуль
вектора скорости
![]() .
.
Таким
образом, зная зависимость
![]() ,
можно найти скорость
,
можно найти скорость
![]() и
ускорение
и
ускорение
![]() частицы
в каждый момент времени.
частицы
в каждый момент времени.
Возникает
и обратная задача: можно ли найти
![]() и
и
![]() ,
зная зависимость от времени ускорения
,
зная зависимость от времени ускорения
![]() ?
?
Оказывается,
для получения однозначного решения
этой задачи одной зависимости
![]() недостаточно,
так как необходимо еще знать начальные
условия,
а именно - скорость
недостаточно,
так как необходимо еще знать начальные
условия,
а именно - скорость
![]() и
радиус-вектор
и
радиус-вектор
![]() частицы
в некоторый начальный момент
частицы
в некоторый начальный момент
![]() .
Чтобы в этом убедиться, рассмотрим
простой случай, когда при движении
ускорение частицы
.
Чтобы в этом убедиться, рассмотрим
простой случай, когда при движении
ускорение частицы
![]() остается
постоянным.
остается
постоянным.
Определим
сначала скорость частицы
![]() .
Согласно (2.2),
за интервал времени dt малое приращение
скорости
.
Согласно (2.2),
за интервал времени dt малое приращение
скорости
![]() .
Интегрируя это выражение по времени от
t = 0 до t, определим конечное приращение
вектора скорости за это время:
.
Интегрируя это выражение по времени от
t = 0 до t, определим конечное приращение
вектора скорости за это время:
![]() .
.
Но
величина
![]() -
это еще не искомая скорость
-
это еще не искомая скорость
![]() .
Для нахождения
.
Для нахождения
![]() ,
необходимо знать скорость
,
необходимо знать скорость
![]() в
начальный момент времени
в
начальный момент времени
![]() .
Тогда
.
Тогда
![]() ,
или
,
или
![]()
Аналогично
вычисляется и радиус-вектор
![]() частицы.
Согласно (2.1),
за интервал времени dt малое приращение
радиус-вектора
частицы.
Согласно (2.1),
за интервал времени dt малое приращение
радиус-вектора
![]() .
После интегрирования этого выражения
с учетом определенной выше зависимости
.
После интегрирования этого выражения
с учетом определенной выше зависимости
![]() ,
определим приращение радиуса-вектора
за время от t = 0 до t:
,
определим приращение радиуса-вектора
за время от t = 0 до t:
![]() .
.
Для
нахождения самого радиус-вектора
![]() необходимо
знать положение частицы в начальный
момент времени
необходимо
знать положение частицы в начальный
момент времени
![]() .
Тогда
.
Тогда
![]() ,
,
или
![]() .
.
Координатный способ. В этом способе с телом отсчета жестко связывают определенную систему координат (декартову, косоугольную или криволинейную). Выбор вида системы координат определяется рядом соображений: характером или симметрией задачи, постановкой вопроса, а также стремлением упростить математическое решение задачи. Для простоты рассмотрим декартову систему координат x,у,z. Изучение движений частицы в других координатах оставим для задач.
Запишем
проекции радиус-вектора
![]() на
оси координат. Вектор
на
оси координат. Вектор
![]() определяет
положение интересующей нас частицы
относительно начала координат О в момент
t:
определяет
положение интересующей нас частицы
относительно начала координат О в момент
t:
![]()
Закон движения частицы - это зависимость координат от времени. Он задает положение частицы в каждый момент времени, ее скорость и ускорение. Cпроектировав (2.1) и (2.2), например, на OX, получим формулы, определяющие проекции векторов скорости и ускорения на эту ось:
|
|
(2.3) |
где
dx- проекция вектора перемещения
![]() на
ось х,
на
ось х,
|
|
(2.4) |
здесь
![]() -
проекция вектора приращения скорости
-
проекция вектора приращения скорости
![]() на
ось х. Такие же соотношения получаются
для у- и z-проекций соответствующих
векторов. Из этих формул видно, что
проекции векторов скорости и ускорения
равны соответственно первой и второй
производным координат по времени.
на
ось х. Такие же соотношения получаются
для у- и z-проекций соответствующих
векторов. Из этих формул видно, что
проекции векторов скорости и ускорения
равны соответственно первой и второй
производным координат по времени.
Зависимости
![]() полностью
определяют движение частицы. Зная их,
можно найти не только положение частицы,
но и проекции ее скорости и ускорения,
а следовательно, модуль и направление
векторов
полностью
определяют движение частицы. Зная их,
можно найти не только положение частицы,
но и проекции ее скорости и ускорения,
а следовательно, модуль и направление
векторов
![]() и
и
![]() в
любой момент времени. Например, модуль
вектора скорости определяется формулой
в
любой момент времени. Например, модуль
вектора скорости определяется формулой
![]() ,
,
а
направление вектора
![]() задается
направляющими косинyсами по формулам:
задается
направляющими косинyсами по формулам:
|
|
(2.5) |

где
,
β ,γ - углы между вектором
![]() и
осями х, у, z соответственно. Направляющие
косинусы всегда удовлетворяют соотношению
и
осями х, у, z соответственно. Направляющие
косинусы всегда удовлетворяют соотношению
![]() .
Аналогичными формулами определяются
модуль и направление вектора ускорения
.
Аналогичными формулами определяются
модуль и направление вектора ускорения
![]() .
.
С помощью закона движения можно найти траекторию частицы, зависимость пройденного ею пути от времени, зависимость скорости от положения частицы и т.д.
Нахождение скорости и закона движения частицы по заданному ускорению называется обратной задачей. Ее решение проводится, как и в векторном способе, путем интегрирования (в данном случае проекций ускорения по времени). Задача и здесь имеет однозначное решение, если кроме ускорения заданы еще и начальные условия: проекции скорости и координаты частицы в начальный момент времени.
![]()
Вернемся
к определению ускорения частицы
![]() .
Выразим
.
Выразим
Здесь еτ является еденичным вектором (ортом) вдоль направления вектора скорости. Отсюда:
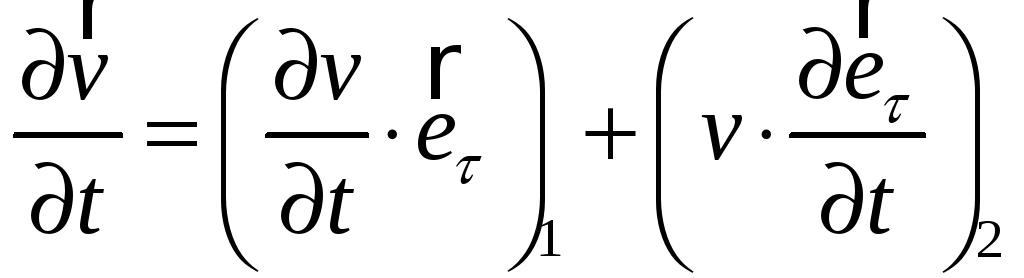
Первая часть нашего равенства характеризует изменение модуля скорости со временем и направлена вдоль вектора скорости эта часть носит название: линейное или тангенциальное ускорение.
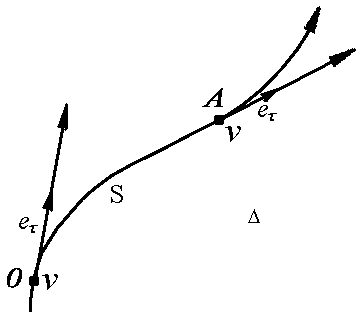
Перейдем ко второй части равенства. Рассмотрим изменение единичного вектора еτ при его повороте за малый промежуток времени t . Для этого совместим начало вектора еτ в первоначальный момент времени с началом этого вектора в момент времени через промежуток t . При этом вектор соединяющий конец первого вектора с концом второго вектора будет приращением (разностью) этих векторов еτ .

![]()

При малом повороте вектора еτ
![]()
При малых
Отсюда вторая исходное уравнение приобретает вид

Производная по времени от угла поворота есть угловая скорость. Представим угловую скорость в виде:


Т аким
образом, мы установили связь между
абсолютными значениями угловой и
линейной скоростью.
аким
образом, мы установили связь между
абсолютными значениями угловой и
линейной скоростью.
Исходное выражение для ускорения точки может быть записано в окончательном виде:

В этом выражении первый член правой части является тангенциальным ускорением, которое направлено в сторону или навстречу движению точки. Второй член называется нормальным или центростремительным ускорением. Центростремительное ускорение всегда перпендикулярно вектору скорости движения точки и направлено к центру кривизны траектории.
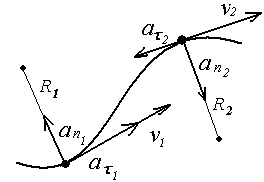
Полное ускорение направлено находится по правилу векторного сложения и является результирующим вектором векторов тангенциального и нормального ускорения. Его абсолютная величина определяется как:
![]()
Вернемся к рассмотрению вращательного движения, характеристиками которого является угол поворота тела и угловая скорость.
Угловая скорость, как и угол поворота, являются векторами (псевдо векторами) направление которых перпендикулярно плоскости вращения и совпадает с направлением вкручивания правого винта, если тот вращается в сторону рассматриваемого вращения.
Есть еще одна векторная характеристика вращательного движения, это угловое ускорение.
![]()
Направление этого вектора (псевдо вектора) совпадает или противоположно вектору угловой скорости в зависимости от того увеличивается или уменьшается угловая скорость объекта.
Равномерное вращение так же характеризуется периодом T (временем одного оборота тела) и частотой вращения (количеством полных оборотов в единицу времени).
![]()
Период измеряется в секундах, частота - в обратных секундах, угол поворота - в радианах, угловая скорость - в радианах в секунду, угловое ускорение - в радианах в секунду за секунду.
Вернемся к выражению для углового ускорения, распишем его и получим связь между линейным и угловым ускорением

Основной задачей кинематики является нахождение положения движущейся матеоиальной точки, ее скорости, ускорения в любой интересующий нас момент времени.
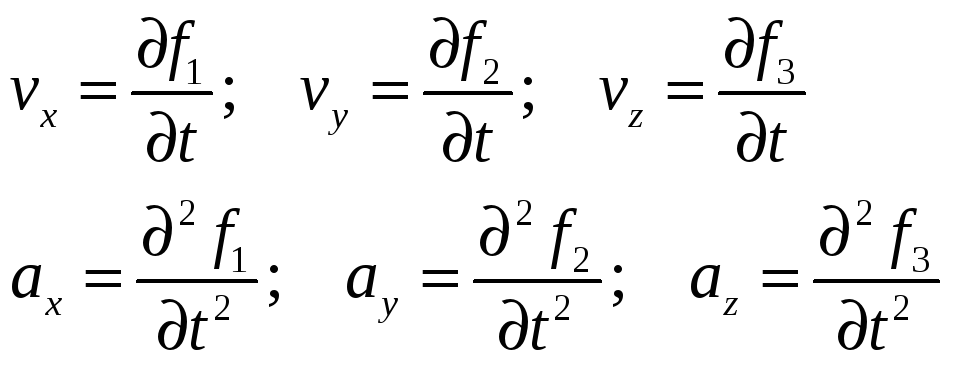
Пусть известен вид функции, выражающей зависимость координат точки от времени
x = f1(t), y =f2(t), z = f3(t). Тогда подставляя значение времени в эти выражения, получим координаты точкив интересующий момент времени. Продифференцировав по времени и продифференцировав дважды по времени функции определяющие координаты точки, получим соответственно значение компонент скорости и ускорения точки.
Возможно так же и обратная задача: по функциям выражающим временную зависимость компонент ускорения от времени найти компоненты скорости и координаты точки в интересующий момент времени. Эта задача решается совершением обратной операции интегрированием. Однократное интегрирование дает значение компонент скорости, двукратное дает значение координат точки.

Так как интегрирование определяет функцию с точностью до произвольной постоянной величины. Для решения поставленной задачи должны быть заданы начальные условия определяемые из дополнительных соображений.
Начальные условия это параметры механического состояния заданные в определенный момент времени. Обычно удобен для этих случаев начальный момент, когда t = 0 .