

Теорема сложения ускорений при составном движении точки (теорема Кориолиса).
|
Формулировка теоремы и вектор- ное уравнение |
Графическое
нахождение
|
Аналитическое
нахождение
|
Ускорение Кориолиса | |
|
Абсолютное
ускорение
В
случае, когда переносное
движе-ние
точки – посту-пательное,
|
Находим
|
Находим
Далее
находим модуль
и
направление вектора
|
| |
|
|
откуда
кратчайший по-ворот
от вектора
2)
Правило
Жуковского:
составляющую
вектора
| |||




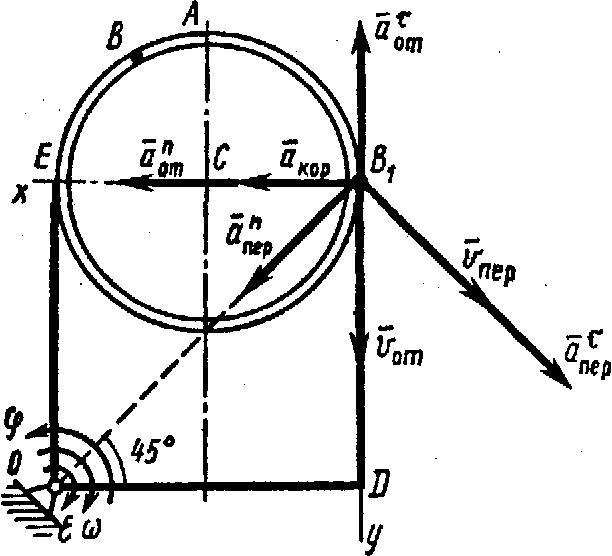
Рассмотрим два типовых примера (в примере К3а ось переносного вращения перпендикулярна пластине, в примере К3б – лежит в ее плоскости).
Пример
K3a.
Пластина
OEAB1D
(ОЕ
=
OD, рис.
К3а) вращается вокруг оси, проходящей
через точку О
перпендикулярно плоскости пластины,
по закону
=
f1(t)
(положительное направление отсчета
угла
показано на рис. К3а
дуговой стрелкой). По дуге окружности
радиуса
R
движется точка В
по закону
![]() (положительное направление отсчета
координаты
s
на траектории
– от A
к В).
(положительное направление отсчета
координаты
s
на траектории
– от A
к В).
|
Рис. К3а. |
Дано: R = 0,5 м, = t2- 0,5t3, s = Rcos(t/3) ( – в радианах, s – в метрах, t – в секундах).
Определить: абсолютную скорость Vабс и абсолютное ускорение аабс в момент времени t1 = 2 с. |
Решение.
Рассмотрим абсолютное движение точки
В
как сложное, считая ее движение по дуге
окружности относительным, а вращение
пластины – переносным движением
(подвижные оси B1xy
связаны с
пластиной). Тогда абсолютная скорость
![]() и абсолютное ускорение
и абсолютное ускорение![]() точки найдутся по формулам:
точки найдутся по формулам:
![]() (1)
(1)
где учтено, что
![]()
Определим все, входящие в равенства (1) величины.
1. Относительное движение(мысленно остановим пластину). Это движение задано естественным способом (см. задачу К1б). Закон движения точки по траектории:
![]() (2)
(2)
Сначала установим, где будет находиться точка В на дуге окружности в момент времени t1. Полагая в уравнении (2) t1 = 2 с, получим
![]()
Тогда
![]()
Знак минус свидетельствует о том, что точка В в момент t1 = 2 с находится справа от точки А. Изображаем ее на рис. К3а в этом положении (точка B1).
Теперь
находим числовые значения
![]()

где
![]() - радиус кривизны относительной
траектории, равный радиусу окружностиR. Для
момента времени t1
= 2с, учитывая, что R
= 0,5 м, получим
- радиус кривизны относительной
траектории, равный радиусу окружностиR. Для
момента времени t1
= 2с, учитывая, что R
= 0,5 м, получим
 (3)
(3)
Знаки
показывают, что вектор
![]() направлен в сторону положительного
отсчета координатыs,
а вектор
направлен в сторону положительного
отсчета координатыs,
а вектор
![]() в противоположную сторону; вектор
в противоположную сторону; вектор![]() направлен к центруС
окружности.
Изображаем все эти векторы на рис. КЗа.
направлен к центруС
окружности.
Изображаем все эти векторы на рис. КЗа.
2.
Переносное
движение
(мысленно остановим точку на пластине).
Это движение (вращение) происходит по
закону![]() (см.
задачу
К2).
Найдем угловую скорость
и угловое ускорение
переносного вращения:
(см.
задачу
К2).
Найдем угловую скорость
и угловое ускорение
переносного вращения:
![]()
и при t1 =2 с
![]()
![]() (4)
(4)
Знаки указывают, что в момент t1 =2 с направления и противоположны направлению положительного отсчета угла ; отметим это на рис. К3а соответствующими стрелками.
Для
определения
![]() и
и
![]() найдем сначала расстояниеh1
= ОВ1
точки В1
от оси
вращения О.
Из рисунка видно, что h1
=
найдем сначала расстояниеh1
= ОВ1
точки В1
от оси
вращения О.
Из рисунка видно, что h1
=
![]() Тогда в момент времениt1
= 2 с, учитывая
равенства (4) , получим
Тогда в момент времениt1
= 2 с, учитывая
равенства (4) , получим
![]()
![]()
![]() (5)
(5)
Изображаем
на рис. КЗа векторы
![]() и
и![]() с учетом направления
с учетом направления![]() и
и![]() и вектор
и вектор
![]() (направлен к оси вращения).
(направлен к оси вращения).
3.
Ускорение
Кориолиса.
Модуль ускорения Кориолиса определяем
по формуле
![]() где
– угол между вектором
где
– угол между вектором
![]() и осью вращения (вектором
и осью вращения (вектором![]() ).
В нашем случае этот угол равен 90°, так
как ось вращения перпендикулярна
плоскости пластины, в которой расположен
вектор
).
В нашем случае этот угол равен 90°, так
как ось вращения перпендикулярна
плоскости пластины, в которой расположен
вектор![]() .
В момент времениt1
= 2 с,
учитывая,
что в этот
момент
.
В момент времениt1
= 2 с,
учитывая,
что в этот
момент
![]() и
и![]() ,
получим
,
получим
![]() (6)
(6)
Направление
![]() найдем по правилу Н.Е.Жуковского: так
как вектор
найдем по правилу Н.Е.Жуковского: так
как вектор![]() лежит в плоскости, перпендикулярной
оси вращения, то повернем его на 90
в направлении
лежит в плоскости, перпендикулярной
оси вращения, то повернем его на 90
в направлении
![]() ,
т.е. по ходу часовой стрелки. Изображаем
,
т.е. по ходу часовой стрелки. Изображаем
![]() на рис.
К3а.
(Иначе
направление
на рис.
К3а.
(Иначе
направление
![]() можно найти, учитывая, что
можно найти, учитывая, что![]() )
Изображаем вектор
)
Изображаем вектор![]() на рис. К3а.
на рис. К3а.
Таким
образом, значения всех входящих в правые
части равенств (1) векторов найдены и
для определения
![]() и
и![]() остается только сложить эти векторы.
Произведем это сложение аналитически.
остается только сложить эти векторы.
Произведем это сложение аналитически.
4.
Определение
![]() .
Проведем координатные оси В1ху
(см. рис. К3а)
и спроектируем почленно обе части
равенства
.
Проведем координатные оси В1ху
(см. рис. К3а)
и спроектируем почленно обе части
равенства
![]() на эти оси. Получим для момента времениt1
= 2 с:
на эти оси. Получим для момента времениt1
= 2 с:
![]()